КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгоритмы трехпозиционного регулирования
|
|
|
|
Алгоритм трехпозиционных регуляторов определяется статической характеристикой: зависимостью выходных сигналов YМ (меньше) и YБ (больше) от входного Х (рис. 12).
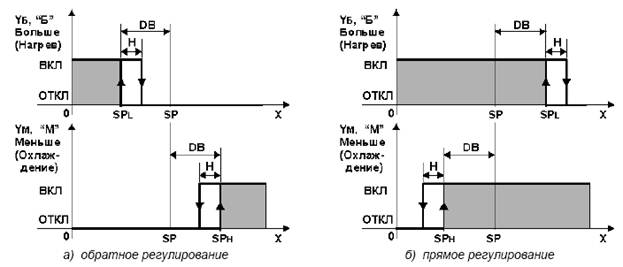
Рис. 12 Статические характеристики трехпозиционной системы регулирования
На рисунке 12-а представлена статическая характеристика трехпозиционной системы регулирования при обратном направлении регулирования. Зона регулирования без перекрытия. На рисунке 12-б представлена статическая характеристика трехпозиционной системы регулирования при прямом направлении регулирования. Зона регулирования с перекрытием. Выбор направления регулирования осуществляется в различных микропроцессорных регуляторах по разному:
- с помощью параметра «прямое-обратное регулирование»,
- с помощью знака параметра «зона нечувствительности регулятора».
При задании положительного значения параметра обеспечивается зона регулирования без перекрытия, при задании отрицательного значения - обеспечивается зона регулирования с перекрытием.
Алгоритм трехпозиционных регуляторов при обратном направлении регулирования (рис.12-а) выглядит следующим образом:
- Выходная величина YБ равна максимальному воздействию - нагреватель включен:
YБ = max при X < SP-DB, где DB-значение ширины зоны нечувствительности.
- Выходная величина YБ равна минимальному воздействию - нагреватель выключен:
YБ = 0 при X> SP-DB +Н, где Н-значение гистерезиса.
- Выходная величина YМ равна максимальному воздействию - охладитель включен:
YМ = max при X>SP+DB, где DB-значение ширины зоны нечувствительности.
- Выходная величина YМ равна минимальному воздействию - охладитель выключен:
YМ = 0 при X <SP+DB-Н, где Н-значение гистерезиса.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 658; Нарушение авторских прав?; Мы поможем в написании вашей работы!