КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электрические исполнительные устройства
|
|
|
|
ТЕХНИЧЕСКИЕ СРЕДСТВА ИСПОЛЬЗОВАНИЯ КОМАНДНОЙ ИНФОРМАЦИИ И ВОЗДЕЙСТВИЯ НА ОБЪЕКТ УПРАВЛЕНИЯ
Исполнительные механизмы и устройства промышленных систем автоматики входят в четвертую функциональную группу изделий ГСП – группу устройств использования командной информации в целях воздействия на процесс и для связи с оператором.
Основные требования к исполнительным механизмам и методы их испытаний определены ГОСТами.
Исполнительный механизм, работающий в системе автоматического регулирования, должен не только совершать работу по перемещению регулирующего органа, но и обеспечивать это перемещение с возможно меньшими искажениями законов регулирования, формируемых регулирующим устройством. Поэтому одним из основных требований, предъявляемых ко многим исполнительным механизмам, является требование обеспечения быстрого действия в работе (быстроты срабатывания) и необходимой точности. К исполнительным механизмам предъявляется также ряд требований конструктивного, эксплуатационного и экономического характера.
Они выражаются в следующем:
− исполнительный механизм должен иметь минимальные габариты и вес, быть конструктивно простым, обладать высокой надежностью и коррозионной устойчивостью, а также обеспечивать плавность и равномерность движения приводного механизма;
− исполнительный механизм должен быть безопасен в эксплуатации, устойчив в работе, обеспечивать постоянство скорости перемещения приводного (рабочего) органа, а также возможность регулирования скорости и развиваемого им крутящего момента;
− исполнительный механизм должен иметь устройство защиты для предохранения приводного органа от перегрузок и поломок, а также систему ручного дублера на случай возможных отказов в схеме управления приводом или при нарушении энергоснабжения, обеспечивать возможность дистанционной передачи положения приводного органа, а также возможность контроля изменения его момента сопротивления.
|
|
|
Основными показателями исполнительных механизмов являются:
1. Номинальные значения вращающего момента на выходном валу исполнительного механизма или усилия на его выходном штоке (т.е. момент или усилие, при которых исполнительный механизм работает с отдачей максимальной полезной мощности).
2. Максимальные значения вращающего момента, на выходном валу исполнительного механизма или усилия на его выходном штоке. Эти значения определяют наибольшие нагрузки, которые данный исполнительный механизм вообще может преодолеть.
3. К.П.Д. – отношение максимальной полезной мощности, получаемой на выходе исполнительного механизма, к мощности, отбираемой от источника энергии при оптимальном режиме работы.
4. Зона нечувствительности, в пределах которой изменение величины управляющего сигнала не вызывает движения исполнительного механизма.
5. Постоянная времени — параметр, характеризующий инерционное запаздывание начала срабатывания исполнительного механизма при подаче к нему управляющего сигнала. Этот показатель вместе с предыдущим определяет величину быстродействия исполнительного механизма в системе автоматического регулирования или управления.
6. Время оборота выходного вала исполнительного механизма или хода его штока.
7. Величина инерционного выбега выходного вала исполнительного механизма. Данный показатель определяет точность действия исполнительного механизма. На величину точности влияют также некоторые конструктивные факторы исполнительного механизма, например люфт, трение и др.
Помимо вышеперечисленных показателей для всех исполнительных механизмов одними из важнейших показателей являются их различные динамические и статические характеристики, которые для каждого типа исполнительного механизма определяются экспериментальным или расчетным путем. Знание этих показателей позволяет осуществить правильный выбор исполнительного механизма для конкретных систем автоматического регулирования или управления и обеспечить его высокоэффективную работу.
|
|
|
Общие сведения об исполнительных устройствах
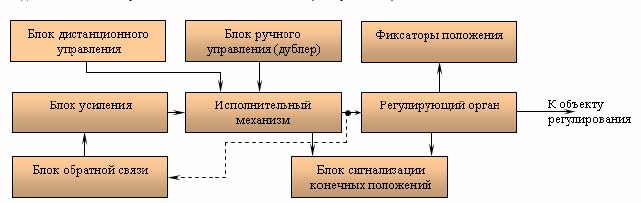
К основным блокам исполнительного устройства относятся исполнительный механизм и регулирующий орган, которые конструктивно могут быть объединены в едином изделии или собираются из индивидуально выпускаемых блоков. Под исполнительным механизмом в общем случае подразумевают блок исполнительного устройства (см. рис. 5.1), преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, который через соответствующую связь осуществляет воздействие на регулирующий орган или непосредственно на объект регулирования. Регулирующим органом называют блок исполнительного устройства, с помощью которого производится регулирующее воздействие на объект регулирования. Кроме исполнительного механизма и регулирующего органа исполнительное устройство содержит ряд вспомогательных блоков, расширяющих область применения исполнительных устройств и обеспечивающих выполнение ряда дополнительных функций. К вспомогательным блокам относятся блок ручного управления для механического (ручного) управления регулирующим органом, блок сигнализации конечных положений для выдачи информации о положении выходного элемента исполнительного механизма или затвора регулирующего органа, фиксаторы положения для фиксации положения выходного элемента исполнительного механизма или затвора регулирующего органа, блок дистанционного управления, блок обратной связи для улучшения статических и динамических характеристик исполнительного устройства или всей замкнутой системы регулирования.
|
| Рис. 5.1 Блок-схема исполнительных устройств |
В настоящее время в нашей стране и за рубежом разработано и применяется большое количество разнообразных исполнительных механизмов, основанных на различных принципах действия и выполняющих различные функции в зависимости от требований, обуславливаемых характером технологического процесса или получением заданного закона изменения положения регулирующего органа.
|
|
|
Поэтому возникает необходимость в четкой и строгой классификации исполнительных механизмов как по виду потребляемой энергии, по их устройству, конструкции и принципу действия, так и по назначению и характеру их использования в автоматических системах.
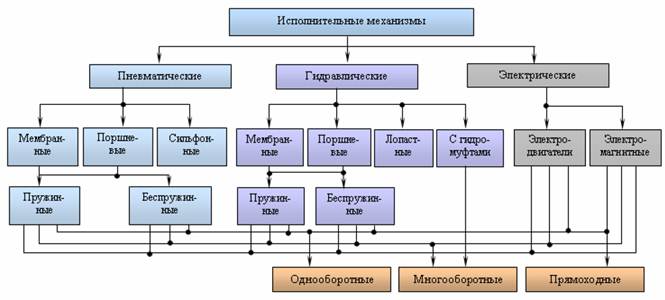
Классификация исполнительных механизмов в соответствии с тремя ветвями ГСП приведена на рис.5.2
|
| Рис. 5.2 Классификация исполнительных механизмов |
По виду потребляемой энергии все исполнительные механизмы можно разделить на следующие группы:
1. Электрические, использующие для своего действия электрическую энергию.
2. Пневматические, использующие энергию сжатого воздуха или газа.
3. Гидравлические, использующие энергию жидкости (гидравлические приводы с рециркуляционной маслосистемой или гидроприводы, использующие в качестве энергоносителя транспортируемую по трубопроводам жидкость, например, нефть или воду).
4. Исполнительные механизмы, использующие энергию паров воды или легкокипящей жидкости.
5. Исполнительные механизмы, использующие энергию газов, образующихся при взрыве (механизмы взрывного действия).
6. Исполнительные механизмы с использованием энергии газов, образующихся при нормальном протекании химической реакции (механизмы химического действия).
7. Исполнительные механизмы, использующие потенциальную энергию падающего груза или сжатой пружины (грузовые и пружинные исполнительные механизмы).
По своему исполнению эти механизмы делятся на две категории:
а) нормального исполнения;
б) специального исполнения.
К последним относятся исполнительные механизмы взрыво- и водозащищенные, тропического и морского исполнения, вибро- и морозостойкие и т. д.
По характеру и назначению работы в автоматических системах исполнительные механизмы разделяются на:
|
|
|
а) работающие по дискретному принципу («открыто -закрыто»);
б) работающие по закону непрерывной функции.
К последним относятся исполнительные механизмы позиционного действия, исполнительные механизмы пропорционального действия, осуществляющие регулирование системы по постоянному параметру (их задача – поддерживать постоянным один заданный параметр), а также некоторые специальные исполнительные механизмы дистанционного управления, работающие в комплексе с другими автоматическими устройствами (например, электронными регуляторами);
в) исполнительные механизмы следящего и программного действия.
Следящий исполнительный механизм сообщает ведомому звену движение, согласованное с определенной точностью с ведущим перемещением, задаваемым исполнительному механизму маломощным устройством.
Программный исполнительный механизм обеспечивает изменение регулируемого звена по заранее заданному закону в зависимости от времени или какой-либо другой величины.
По скорости вращения или движения исполнительные механизмы могут разделяться на тихоходные и быстроходные.
Однако классификация по этому признаку является чисто условной, так как для разных процессов одни и те же исполнительные механизмы при одной и той же скорости их выходных звеньев могут считаться и быстроходными и тихоходными.
По времени работы исполнительные механизмы могут быть разбиты на три основные группы:
а) с продолжительным;
б) с кратковременным;
в) с повторно-кратковременным режимом работы.
Этот признак имеет существенное значение для электрических исполнительных механизмов, где режимы работы определяют их тепловые нагрузки.
По способу управления исполнительные механизмы можно разделить на механизмы:
а) местного действия;
б) дистанционного действия;
в) телеуправляемые.
Классификацию исполнительных механизмов можно также вести и по другим признакам.
В частности, например, исполнительные механизмы, осуществляющие переключение затворов напорных трубопроводов в зависимости от времени срабатывания дросселирующего органа затвора, можно разбить на:
а) быстродействующие, переключающие трубопровод мгновенно;
б) с плавным дросселированием проходного сечения и т. д.
Регулирующие органы
Регулирующие органы непосредственно воздействуют на процесс изменения количества подаваемого вещества или энергии в объекте управления.
При двухпозиционном регулировании (открыто-закрыто) затвор регулирующего органа быстро перемещается в одно из крайних положений. В этом случае регулирование параметра рабочей среды осуществляется за счет соотношения между промежутками времени, когда регулирующий орган закрыт или открыт.
При непрерывном регулировании пропускная способность регулирующего органа определяется степенью его открытия.
Регулирующие органы по виду воздействия на объект подразделяются на два основных типа: дросселирующие и дозирующие.
Дросселирующие регулирующие органы изменяют гидравлическое сопротивление в системе, воздействующее на расход вещества путем изменения своего проходного сечения.
В дозирующих регулирующих органах осуществляется заданное дозирование поступающего вещества или энергии или изменение расхода вещества путем изменения производительности агрегатов. В настоящее время широкое распространение в АСУ ТП получили дросселирующие регулирующие органы, хотя применение дозирующих регулирующих органов экономически более оправдано.
Ниже приводится классификация регулирующих органов.
Таблица 3.1
| I. Дросселирующие | II. Дозирующие |
| 1. Для стандартных исполнительных устройств: • заслоночные • односедельные • трехходовые • двухседельные • диафрагмовые • шланговые | 1. Механические: • плужковые сбрасыватели • дозаторы • насосы • питатели • компрессоры |
| 2. Для специальных исполнительных устройств: • задвижные • крановые • клапаны с поворотными створками • шиберные • направляющие аппараты • специальные | 2. Электрические: • реостатные • автотрансформаторы • специальные |
Регулирующие органы характеризуются многими параметрами, основными из которых являются: максимально допустимое давление на входе в регулирующий орган, минимальный расход среды, перепад давления на регулирующем органе, расход через полностью открытый клапан. Подбор регулирующего органа осуществляется по перечисленным параметрам.
По конструктивному исполнению для газообразных и жидких сред дросселирующие регулирующие органы подразделяются на односедельные, двухседельные, шланговые, диафрагмовые и заслоночные.
Односедельные РО представляют собой клапан, в котором изменение пропускной способности определяется поступательным перемещением затвора относительно прохода седла. Они применяются при больших перепадах давления, расходах и диаметрах условного прохода РО, (условный проход РО — это номинальный диаметр прохода присоединительных патрубков).
Шланговые и мембранные РО — это бессальниковые регулирующие органы, которые используются для изменения расхода агрессивных и загрязненных жидкостей.
Заслоночные РО применяются для управления потоками газовых сред. РО заслонка — это круглая, квадратная или прямоугольная пластина, закрепленная на оси и размещенная в корпусе.
Наибольшее распространение получили дроссельные регулирующие органы – клапаны и заслонки.
Электрические исполнительные устройства (ЭИУ) находят преимущественное распространение в системах автоматизации, использующих изделия электрической ветви ГСП. При необходимости использовать пневматические и гидравлические исполнительные устройства последние дополняются электропневмо- и электрогидропреобразователями.
Преимущества электрических исполнительных механизмов по сравнению с исполнительными механизмами, использующими для своей работы другие виды энергии, выражаются в следующем:
ü неограниченный радиус действия и управления;
ü возможность применения при отрицательной температуре окружающей среды;
ü простота в эксплуатации;
ü отсутствие сложной системы трубопроводов, требующих безукоризненной герметизации.
В зависимости от применяемого первичного двигателя электрические исполнительные механизмы можно разделить на две группы: электродвигательные (моторные) и электромагнитные (соленоидные).
В электродвигательных исполнительных механизмах, которые иногда называют электрическими приводами, силовым элементом является электродвигатель постоянного или переменного тока (асинхронный, синхронный или коллекторный).
В электромагнитных исполнительных механизмах (их часто называют электромагнитными приводами) силовым элементом является соленоид или электромагнит постоянного или переменного тока.
Электрические исполнительные устройства могут быть разделены на четыре группы:
• ЭИУ позиционного действия;
• ЭИУ постоянной скорости;
• ЭИУ переменной скорости;
• усилители мощности.
Исполнительные механизмы электрических исполнительных устройств позиционного типа, постоянной или переменной скорости состоят из электродвигателя и редуктора. Такой исполнительный механизм по своим динамическим свойствам соответствует интегрирующему звену, если в качестве выходной переменной в исполнительном устройстве принят угол поворота (перемещение). Вследствие этого силовая часть может формировать интегральную составляющую таких законов регулирования, как пропорционально-интегрального и пропорционально-интегрально-дифференциального в структуре регулятора.
Другой способ использования исполнительных механизмов с электродвигателями состоит в охвате двигателя жесткой обратной связью, и в этом случае электрическое исполнительное устройство является пропорциональным звеном, положение выходного органа которого пропорционально входному сигналу.
Качество работы электрических исполнительных устройств с электродвигателями характеризуют такими показателями, как номинальный момент, время полного хода, выбег, люфт, гистерезис, импульсные характеристики, режим работы.
Время полного хода выбирают исходя из допустимого времени перестановки затвора регулирующего органа от начала до конца.
Выбег есть перемещение выходного органа исполнительного механизма после выключения механизма, работающего в установившемся режиме. Выбег желательно иметь таким, чтобы после выключения двигателя изменение сигнала обратной связи по регулируемому параметру было в пределах установленной зоны нечувствительности регулятора. Согласно требованиям ГОСТ 7192-80Е, величина выбега не должна быть более 1 % для электрических исполнительных устройств с временем полного хода 10 с, 0,5 % для механизмов с временем 25 с и 0,25 % для механизмов с временем 63 с и более.
Люфт и гистерезис характеризуют нелинейности статической характеристики электрического исполнительного устройства. Люфт образуется свободным ходом выходного органа при неподвижном вале электродвигателя из-за зазора в зацеплении кинематических узлов редуктора, износа контактирующих поверхностей. Согласно ГОСТ 7192-80Е, люфт выходного органа не должен превышать 1 мм для однооборотных электрических исполнительных устройств с номинальной нагрузкой 40 Н⋅м и менее; 0,75 мм для однооборотных электрических исполнительных устройств нагрузкой более 40 Н⋅м; 3 мм для многооборотных электрических исполнительных устройств; 0,2 мм для прямоходных электрических исполнительных устройств с нагрузкой до 1000 Н и 0,5 мм при нагрузке свыше 1000 Н. Гистерезис между положением выходного органа и сигналом датчика положения складывается из люфта механической передачи и вариаций показаний датчика. По стандарту гистерезис не должен быть более 1,5% полной шкалы показаний датчика при нелинейности статической характеристики менее 2,5%.
Импульсная характеристика электрического исполнительного устройства определяется как средняя относительная скорость S перемещения выходного органа. Для электрического исполнительного устройства постоянной скорости с импульсным сигналом управления рассматривается отношение величины перемещения выходного органа к длительности импульса, вызвавшего перемещение. Если это перемещение брать в долях от полного хода, а длительность – в долях времени полного хода, то соответственно их отношение даст значение S. Значение S=f(∆t), где ∆t – относительная длительность импульса управления, и образует импульсную характеристику. Для идеального электрического исполнительного устройства постоянной скорости S=1. Реальное значение S отечественных электрических исполнительных устройств постоянной скорости лежит в диапазоне от 0,5 до 1,5.
Режим работы исполнительного устройства – повторно-кратковременный реверсивный, с частотой до 320 включений в час и продолжительностью до 25% при нагрузке на выходном органе в пределах от номинальной противодействующей до 0,5 номинального значения сопутствующей. К электрическим исполнительным устройствам предъявляются требования к повышенной частоте включений: в течение часа 600 и более с интервалом времени между выключением и включением на обратный ход не менее 50 мс.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 6795; Нарушение авторских прав?; Мы поможем в написании вашей работы!