КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулювання швидкості зменшенням первинної напруги
|
|
|
|
При зменшенні первинної напруги U 1 момент двигуна змінюється пропорційно U 12 і відповідним чином змінюються його механічні характеристики (рис. 3.45). При цьому змінюються також значення робочих ковзань s 1, s 2, s 3 за заданої механічної характеристики робочої машини. Очевидно, що регулювання ковзання s у такому випадку можливе лише у межах 0 < s < s кр . Для отримання достатньо великого діапазону регулювання частоти обертання необхідно, щоб активний опір кола ротора був достатньо великим (асинхронний двигун з підвищеним ковзанням).
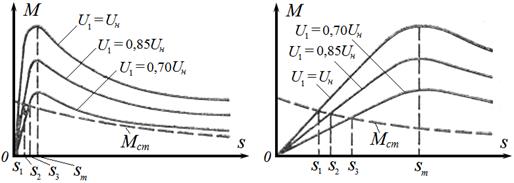
Рис. 3.45 – Механічні характеристики асинхронних двигунів за різних значень первинної напруги
Слід враховувати, що у вторинному колі виникають втрати, які дорівнюють втратам ковзання Рs та призводять до зниження ККД двигуна.
Імпульсне регулювання швидкості здійснюється шляхом періодичного вмикання двигуна у мережу живлення та відключення його від мережі або шляхом шунтування опорів послідовно увімкнених у коло статора. При цьому двигун весь час перебуває у перехідному режими прискорення бо сповільнення ротора і в залежності від частоти та тривалості імпульсів працює з деякою, приблизно постійною швидкістю обертання. Такий спосіб регулювання частоти обертання застосовується для двигунів потужністю до 50 кВт.
Більш детально питання регулювання швидкості асинхронних двигунів розглядаються у курсі електроприводу.
Регулювання частоти обертання асинхронних двигунів із фазним ротором. Для двигунів із фазним ротором можна в принципі використовувати такі ж самі способи регулювання частоти обертання як і для двигунів з короткозамкненим ротором. Нижче розглянемо способи регулювання швидкості, в яких використовується можливість включення регульованих пристроїв у коло ротора.
|
|
|
Регулювання частоти обертання за допомогою реостата у колі ротора здійснюється за тією ж схемою, що і реостатний пуск двигуна (рис. 3.39) але реостат при цьому має бути розрахованим на тривалу роботу. Зі збільшенням активного опору вторинного кола вигляд механічної характеристики двигуна змінюється (рис. 3.40, а) характеристика стає більш м’якою і ковзання двигуна за того ж самого моменту навантаження Мст збільшується.
При Мст = const робоче ковзання s із достатньо високою точністю пропорційне критичному ковзання skp, і відповідно активному опору кола ротора. Тому ковзання s i s ', які відповідають випадкам Rд =0 та Rд ≠0 визначаються із співвідношення:
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 202; Нарушение авторских прав?; Мы поможем в написании вашей работы!