КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Курсовой проект. Электропривода постоянного тока
|
|
|
|
Электропривода постоянного тока
Расчет систем автоматизированного
Пояснительная записка
140604.000 000.027 ПЗ
| Руководитель к.т.н., доцент Студент гр. ЭНЗ-220508нс | Ишматов З.Ш. Овчинников О.А. |
Екатеринбург
2014 год
Содержание
| Содержание | |
| Задание на проектирование | |
| Введение | |
| 1. Синтез последовательного корректирующего устройства – регулятора скорости (РС) | |
| 1.1. Определение передаточной функции неизменяемой части | |
| 1.2. Построение ЛАЧХ неизменяемой части системы | |
| 1.3. Построение желаемой ЛАЧХ разомкнутой системы и синтез корректирующего устройства | |
| 1.4. Анализ качества по реакции на ступенчатое задающее воздействие | |
| 2. Исследование устойчивости и качества системы | |
| 2.1. Определение запасов устойчивости | |
| 2.2. Построение реакции системы w(t), i(t) на возмущающее воздействие – ступенчатое изменение iс(t)= 1(t) | |
| 2.3. Построение реакции системы w(t), i(t) на типовое трапецеидальное задающее воздействие w3(t)= t | |
| 3. Исследование точности системы | |
| 3.1. Вычисление коэффициентов ошибок и систематических ошибок | |
| 3.2. Вычисление оценок степени влияния помех | |
| 3.3.Оценка ошибок системы моделированием | |
| 4. Конструктивные расчеты РС | |
| 4.1. Определение параметров непрерывного РС | |
| 4.2. Расчет алгоритма работы цифрового регулятора | |
| 4.3. Анализ качества системы с цифровым РС при ступенчатом изменении задающего воздействия w3(t)= t | |
| Заключение | |
| Библиографический список |
Задание на проектирование
Исследовать автоматизированный электропривод постоянного тока, функциональная схема которого представлена на рис.1.
|
|
|
Схема включает два контура регулирования: внутренний – контур регулирования тока и внешний – контур регулирования скорости.
В контур регулирования тока входят регулятор тока (РТ), тиристорный преобразователь (ТП), звено, учитывающее электромагнитную инерцию двигателя постоянного тока (Д1), и датчик тока (ДТ). Регулирование тока в контуре осуществляется регулятором тока РТ, который получает информацию о задачах управления (i3) от регулятора скорости РС и информацию о результатах управления от датчика ДТ.
Регулирование тока осуществляется в соответствии с пропорционально-интегральным законом управления.
В контур регулирования скорости входят регулятор скорости (РС), замкнутый контур регулирования тока, звено, учитывающее механическую инерцию двигателя постоянного тока (Д2), и датчик скорости (ДС). Сигнал задания для системы в целом формируется задатчиком интенсивности (ЗИ), обеспечивающим необходимый темп изменения скорости.
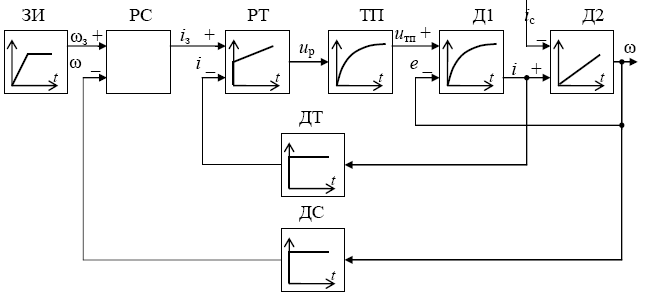
Рис.1. Функциональная схема электропривода постоянного тока
w3 – входной сигнал; iс – статический ток (нагрузка, действующая на валу двигателя)
На основании функциональной схемы электропривода постоянного тока составлена структурная схема системы, изображенная на рис.2, являющаяся основной исходной расчетной схемой.
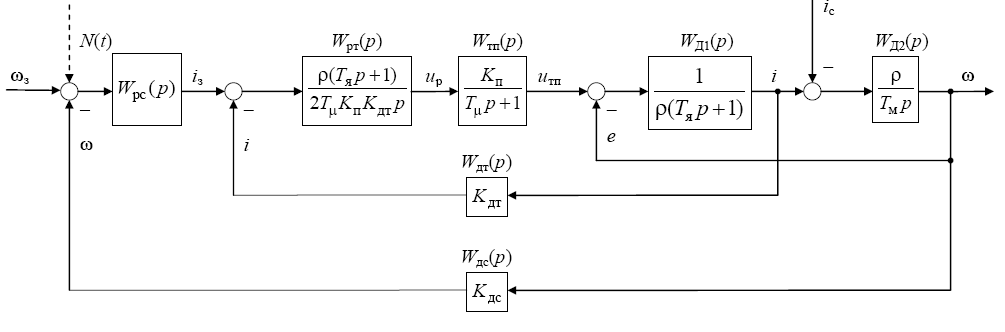
Рис.2. Структурная схема электропривода постоянного тока
N(t) – сигнал помехи
Передаточные функции элементов схемы автоматического регулирования(САР):
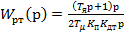 - регулятор тока,
- регулятор тока,
где r = 0,028 - сопротивление якорной цепи,
Т я = 0,024 с – электромагнитная постоянная времени электропривода,
|
|
|
Т m = 0,06 с – постоянная времени фильтра на входе преобразователя,
К п = 2,7 – коэффициент преобразователя,
К дт = 0,24 – коэффициент датчика тока;
 л - тиристорный преобразователь;
л - тиристорный преобразователь;
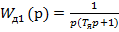 - звено, учитывающее электромагнитную инерцию двигателя постоянного тока (ДПТ);
- звено, учитывающее электромагнитную инерцию двигателя постоянного тока (ДПТ);
 1 - звено, учитывающее механическую инерцию ДПТ,
1 - звено, учитывающее механическую инерцию ДПТ,
где Т м = 0,06 – электромеханическая постоянная времени электропривода;
W дт(р) = К дт - датчик тока;
W дс(р) = К дс - датчик скорости,
где К дс = 1 – коэффициент датчика скорости;
Т = 0,02 с – период дискретности цифрового регулятора скорости.
Проектируемая система должна обеспечить следующие показатели качества переходного процесса при w3(t) = 1(t):
1) перерегулирование s ≤ (30-50) %;
2) время достижения максимума tm = (0,15-0,2) с;
3) время переходного процесса t п= (0,3-0,4) с.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 728; Нарушение авторских прав?; Мы поможем в написании вашей работы!