КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Розділ 5. Приклад зрівноваження полігонометричного ходу 4 класу корелантним способом
 |
Вихідними даними для зрівноваження даного полігонометричного ходу довільної форми є координати вихідних точок, виміряні ліві кути та довжини сторін ходу.
Основні формули зрівноваження
1. Первинні поправки в кути  .
.
2. Абсциса центру ваги ходу  .
.
3. Абсциси точок ходу відносно центру ваги  .
.
4. Поздовжній та поперечний зсуви  ;
;
5. Поправки в лінії  ;
;
6. Вторинні поправки у виміряні кути 
За зрівноваженими приростами я визначив кінцеві значення координат X, Y. Контроль зійшовся: вирахувані значення кінцевих координат точно співпали з виписаними.
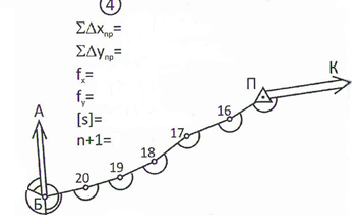
Рис. 5.1 Строге зрівноваження полігонометричного ходу наведене в таблиці.
| Відомість зрівноваження витягнутого полігонометричного ходу 4 класу двогруповим корелатним способом | |||||||||||||||||
| № | Виміряні кути β | Дирекційні кути α | Довжини ліній S, м | Прирости координат, м | Кінцеві координати, м | Х' | |||||||||||
| Наближені | Зрівноважені | ||||||||||||||||
| ∆Χ | ∆Υ | ∆Χ | ∆Υ | Χ | Υ | ||||||||||||
| Хід 1 | |||||||||||||||||
| К | ° | ′ | ″ | ° | ′ | ″ | |||||||||||
| -1,3 | -4,8 | 58,0 | |||||||||||||||
| П | 228 | 30 | 9,0 | -4,8 | -2,7 | 15803,160 | 13465,373 | 0 | -1528 | 2336094 | |||||||
| -1,3 | -3,2 | 147 | 53 | 7,0 | 523,853 | 523,850 | -443,696 | 278,489 | -443,687 | 278,498 | |||||||
| 189 | 32 | 19,0 | -7,9 | -2,6 | 15359,473 | 13743,871 | 524 | -1004 | 1008877 | ||||||||
| -1,3 | -1,6 | 157 | 25 | 26,0 | 507,825 | 507,822 | -468,911 | 194,959 | -468,901 | 194,976 | |||||||
| 170 | 51 | 45,0 | -9,5 | -2,7 | 14890,572 | 13938,847 | 1032 | -496 | 246441 | ||||||||
| -1,3 | 0,1 | 148 | 17 | 11,0 | 521,979 | 521,976 | -444,040 | 274,391 | -444,025 | 274,410 | |||||||
| 178 | 54 | 25,0 | -9,4 | -2,6 | 14446,547 | 14213,257 | 1554 | 26 | 654 | ||||||||
| -1,3 | 1,6 | 147 | 11 | 36,0 | 494,455 | 494,452 | -415,591 | 267,899 | -415,577 | 267,916 | |||||||
| 194 | 38 | 59,0 | -7,8 | -2,5 | 14030,970 | 14481,173 | 2048 | 520 | 269954 | ||||||||
| -1,3 | 3,1 | 161 | 50 | 35,0 | 475,639 | 475,637 | -451,955 | 148,219 | -451,947 | 148,235 | |||||||
| 171 | 36 | 37,0 | -4,7 | -2,6 | 13579,023 | 14629,409 | 2524 | 996 | 991162 | ||||||||
| -1,3 | 4,7 | 153 | 27 | 12,0 | 493,052 | 493,049 | -441,070 | 220,358 | -441,063 | 220,367 | |||||||
| Б | 298 | 29 | 59 | 0,0 | 13137,960 | 14849,775 | 3017 | 1489 | 2215845 | ||||||||
| 11,0 | |||||||||||||||||
| А | 271 | 57 | 11,0 | 0 | 0 | ||||||||||||
| 1432 | 34 | 13,0 | [S] = | 3016,803 | -2665,263 | м | 1384,315 | м Хц = | 1747 | 0 | 7069028 | ||||||
| 1432 | 34 | 2,3 | -2665,199 | м | 1384,403 | м | t | 0,016 | м | ||||||||
| 0 | 0 | 10,7 | -0,063 | м | -0,088 | м | u | 0,108 | м | ||||||||
| ± | 0 | 14,1 | 0,109 | м | 1 | 0,109 | м | ||||||||||
| 27700 | L | 3003,308 | |||||||||||||||
| 0,012 | м | e | 0,000005225 |
Висновки до розділу 5
|
|
|
У даному розділі виконано строге зрівноваження полігонометричного ходу способом найменших квадратів. Зрівноважені значення кінцевих координат точно зійшлись із вихідними виписаними координатами. Дотримуючись певних критеріїв я встановив, що даний полігонометричний хід є довільної форми.
Висновки
Даний курсовий проект поглибив знання з питань створення геодезичної основи для виконання топографічного знімання і набуття навиків практичного застосування розрахункових формул оцінки точності на стадії проектування.
На своїй ділянці робіт запроектовані полігонометричний хід 4 класу, хід І розряду, та прямі та обернені багакратні засічки. Полігонометричний хід 4 класу з’єднують пункти тріангуляції. За характеристикою встановлено, що хід є зігнутий.
|
|
|
Ділянка робіт становить 6 ходів. Хід 4 класу простягається на 2240 м, кількість сторін в ході. Найдовшим полігометричним ходом є полігонометричний хід 4 класу довжиною 2260 м, кількість сторін в ході 6. Найдовшим полігометричним ходом І розряду є хід №4 довжиною 410 м, кількість сторін в ході 8.
Прив’язка опознаків була здійснена мною при проектуванні ходів першого та другого розряду. Опознаки ОПВ-8 були включені в полігонометричну мережу першого розряду. Для опознаків ОПВ-1, ОПВ-2, ОПВ-3,ОПВ-4, ОПВ-5,ОПВ-6,ОПВ-7,ОПВ-9,ОПВ-10 була здійснена прив’язка полігонометричною мережею 2 розряду.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 575; Нарушение авторских прав?; Мы поможем в написании вашей работы!