КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнение колебательного движения (зависимость координаты от времени),
|
|
|
|
МЕХАНИКА
Основы кинематики
1. Равномерное движение: х(t) = х0 + υх · t, sх(t) = υх · t, 
2. Неравномерное движение: 
 ,
,
υх(t) = υ0х ± ах · t,  ,
, 
3. Движение по вертикали: 
 ,
,
υх(t) = υ0х ± gх · t
4. Движение по окружности:  ,
,  ,
,  , υ = 2 · π · ν · R, υ = ω · R
, υ = 2 · π · ν · R, υ = ω · R
 ,
,  , ац = 4 · π2 · ν2 · R, ац = ω2 · R
, ац = 4 · π2 · ν2 · R, ац = ω2 · R
 ,
, 
При равномерном движении ω = соnst (φ – угол поворота).
Основы динамики
1. R – равнодействующая сила:  , где α = (
, где α = ( )
)
2. I закон Ньютона: существуют такие инерциальные системы отсчёта, относительно которых поступательно движущееся тело сохраняет свою скорость постоянной (или покоится), если на него не действуют другие тела (или действие других тел компенсируется)
[ т.е.  ,
,  , ==>
, ==>  или
или  = соnst (
= соnst ( ) ].
) ].
II закон Ньютона: 
III закон Ньютона: 
3. Основной закон динамики:  , где
, где  – изменение импульса тела.
– изменение импульса тела.
4. Ускорение свободного падения: 
5. I-ая космическая скорость:  ,
, 
Силы в природе
1. N = Р = m · g, где Р – вес тела (т.е. сила, с которой тело действует на горизонтальную опору или вертикальный подвес, вследствие притяжения к земле), N – сила реакции опоры.
Тело движется вверх (+) или вниз (−) вместе с опорой: Р = N = m · (g ± а)
Невесомость – состояние, при котором тело движется под действием силы тяжести (а = g).
2. Силы:
- закон Гука, Fупр. = k · | х |, где k – коэффициент жёсткости, х − удлинение
- трения, Fтр = μ · N, где μ – коэффициент трения
- тяжести, Fт = m · g
- закон всемирного тяготения,  , где
, где
G = 6,67 · 10-11  – гравитационная постоянная
– гравитационная постоянная
- архимедова сила, FАрх. = ρж · g · Vт, FАрх. = Р = m · g – закон Архимеда.
3. Алгоритм решения задач на II закон Ньютона:
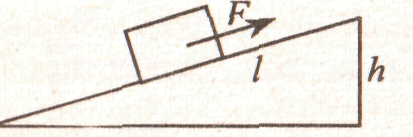

ОХ: F − Fтр + 0 ± Fт · Sin α = ± m · а,
(«±» в зависимости от вида движения)
ОУ: 0 + 0 + N − Fт · Соs α = 0, где Fт = m · g, Fтр = μ · N.
|
|
|
Законы сохранения в механике
1. Импульс силы:  ,
, 
2. Импульс тела: 
3. Закон сохранения импульса:  ,
, 
4. Механическая работа:  , А = F · s · Соs α, где α = (
, А = F · s · Соs α, где α = ( )
)
- работа силы тяжести, А = ± m · g · s, А > 0 – вниз, А < 0 – вверх.
- работа силы трения, А = − μ · N · s.
- работа силы упругости, 
5. Механическая энергия: Е = Ек + Ер, где Е – полная механическая энергия
- кинетическая энергия, 
- потенциальная энергия, Ер = m · g · h
- потенциальная энергия упруго деформированного тела, 
6. Теорема о кинетической энергии: А = Ек2 – Ек1, А = ΔЕк.
7. Теорема о потенциальной энергии: А = – (Ер2 – Ер1), А = – ΔЕр.
8. Закон сохранения энергии: Ек1 + Ер1 = Ек2 + Ер2.
9. Мощность:  , N = F · υ (р/м движение).
, N = F · υ (р/м движение).
Статика
1.  Момент сил,
Момент сил,  , где ℓ − плечо силы (т.е. кратчайшее расстояние от линии, вдоль которой действует сила, до оси вращения рычага)
, где ℓ − плечо силы (т.е. кратчайшее расстояние от линии, вдоль которой действует сила, до оси вращения рычага)
2. Правило моментов, 
3. Условие равновесия рычага, 
Гидростатика
1. Давление:  ,
,  , где S – площадь поверхности
, где S – площадь поверхности
2. Давление в жидкостях и газах: Р = ρ · g · h.
3. Условия плавания тел:
- FАрх. > Fт – тело всплывает.
- FАрх. < Fт – тело тонет.
- FАрх. = Fт – тело внутри жидкости.
Механические колебания и волны
х(t) = А · Sin (ω·t + φ0) или х(t) = Хm · Соs (ω·t + φ0), где
φ0 – начальная фаза, А (или Хm) – амплитуда колебаний координаты.
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 686; Нарушение авторских прав?; Мы поможем в написании вашей работы!