КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Робота і енергія
|
|
|
|
Робота. Дія сили на ділянці шляху характеризується роботою, що визначається формулою (див. рис. 5)
 , (1.28)
, (1.28)
де  – проекція сили на напрямок переміщення (тобто на напрямок вектора миттєвої швидкості), а
– проекція сили на напрямок переміщення (тобто на напрямок вектора миттєвої швидкості), а  – скалярний добуток сили
– скалярний добуток сили  на переміщення
на переміщення  . Скалярним добутком двох векторів називається скаляр, який дорівнює добутку модулів векторів, що перемножуються, на косинус кута між ними.
. Скалярним добутком двох векторів називається скаляр, який дорівнює добутку модулів векторів, що перемножуються, на косинус кута між ними.
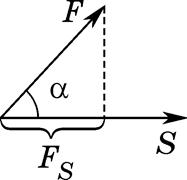
Рис. 5
Формула (1.28) справедлива, якщо  є незмінною величиною на всьому шляху. Якщо проекція сили змінюється, то щоб визначити її роботу, потрібно розбити весь шлях на елементарні відрізки шляху, які повинні бути настільки
є незмінною величиною на всьому шляху. Якщо проекція сили змінюється, то щоб визначити її роботу, потрібно розбити весь шлях на елементарні відрізки шляху, які повинні бути настільки
маленькими, щоб на кожному з них  можна було вважати незмінною величиною. Тоді
можна було вважати незмінною величиною. Тоді
 . (1.29)
. (1.29)
Формула (1.29) тим точніша, чим менші  . Строгий знак рівності можна поставити тільки під знаком границі при
. Строгий знак рівності можна поставити тільки під знаком границі при  . Тоді
. Тоді
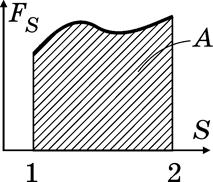
Рис. 6
 . (1.30)
. (1.30)
На координатній площині ( ) робота чисельно дорівнює площі криволінійної трапеції, яка зверху обмежена графіком залежності FS (S), знизу віссю шляху, ліворуч і праворуч – початковим і кінцевим значеннями шляху S (див. рис. 6). Якщо інтеграл в (1.30) не можна виразити через елементарні функції, то, побудувавши графік залежності FS (S) на міліметровому папері, можна визначити роботу як площу криволінійної трапеції.
) робота чисельно дорівнює площі криволінійної трапеції, яка зверху обмежена графіком залежності FS (S), знизу віссю шляху, ліворуч і праворуч – початковим і кінцевим значеннями шляху S (див. рис. 6). Якщо інтеграл в (1.30) не можна виразити через елементарні функції, то, побудувавши графік залежності FS (S) на міліметровому папері, можна визначити роботу як площу криволінійної трапеції.
Потужність. Це фізична величина, яка характеризує роботу за одиницю часу. Якщо за елементарний проміжок часу  виконується робота DА, то середня потужність
виконується робота DА, то середня потужність
 .
.
Миттєва потужність
 ,
,
тобто миттєва потужність дорівнює першій похідній від роботи за часом. Оскільки  , то для миттєвої потужності отримаємо формулу
, то для миттєвої потужності отримаємо формулу
 ,
,
де в правій частині стоїть скалярний добуток вектора сили і вектора швидкості.
Потенціальне поле сил. Якщо на тіло в кожній точці простору діє сила, яка неперервно змінюється від точки до точки, то говорять що тіло знаходиться у полі сил.
|
|
|
Поле сил, робота яких не залежить від форми шляху (траєкторія), а визначається тільки початковим і кінцевим положенням тіла, має назву потенціального, а сили, що діють у цьому полі, – консервативними. Основна властивість потенціального поля сил – робота консервативних сил по замкненому шляху дорівнює нулю.
Поле сил важкості, поле сил пружності пружини – це приклади потенціальних полів сил. Робота сил тертя по замкненому шляху менша нуля, тому сили тертя – це неконсервативні сили.
Енергія. Величина, що характеризує здатність тіла виконати роботу, називається енергією. Розрізняють енергію двох типів: потенціальну й кінетичну.
Кінетична енергія Ek. Це енергія руху тіла, що визначається за формулою
 .
.
Робота, що виконується над тілом, дорівнює приросту його кінетичної енергії.
 .
.
Потенціальна енергія Ep. Це енергія взаємодії між тілами у потенціальному полі сил. Для різних потенціальних полів сил, будуть і різні формули для потенціальної енергії:
1) у полі сил важкості  , де h – висота тіла над поверхнею Землі;
, де h – висота тіла над поверхнею Землі;
2) у полі сил пружності Ep=kx2/2, де k – коефіцієнт пружності пружини, x – деформація пружини.
Робота консервативних сил над системою дорівнює зміні потенціальної енергії системи
 .
.
Кінетична енергія – це характеристика одного тіла, а потенціальна – характеристика всієї системи.
Повна енергія системи. Це сума кінетичних енергій всіх тіл системи та її потенціальної енергії як цілого
 .
.
Закон збереження повної механічної енергії. Приріст повної енергії системи дорівнює роботі неконсервативних сил
DE=E2 – E1=A12некон.
Якщо система тіл знаходиться у полі тільки консервативних сил (A12некон=0), то  . Таким чином, у системі тіл, на які діють тільки консервативні сили, повна механічна енергія залишається незмінною.
. Таким чином, у системі тіл, на які діють тільки консервативні сили, повна механічна енергія залишається незмінною.
|
|
|
Зв’язок між потенціальною енергією і силою визначається за формулою
 ,
,
де  – оператор градієнта, або просто градієнт,
– оператор градієнта, або просто градієнт,  – орти (одиничні вектори) вздовж координатних осей. Сила в потенціальному полі сил завжди направлена в бік максимально швидкого зменшення потенціальної енергії.
– орти (одиничні вектори) вздовж координатних осей. Сила в потенціальному полі сил завжди направлена в бік максимально швидкого зменшення потенціальної енергії.
Умова рівноваги механічної системи. З формули (4) випливає умова рівноваги механічної системи: для замкненої системи тіл рівноважною може бути тільки конфігурація, що відповідає мінімуму потенціальної енергії системи, оскільки в мінімумі  . Це буде стійке положення рівноваги. У максимумі потенціальної енергії досягається нестійке положення рівноваги.
. Це буде стійке положення рівноваги. У максимумі потенціальної енергії досягається нестійке положення рівноваги.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1290; Нарушение авторских прав?; Мы поможем в написании вашей работы!