КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Маса 0,01 кг
Побудова логічних систем керування
Системи керування розділяються на однотактні і багатотактні. Перші називаються також системами без пам'яті, а другі – з пам'яттю. Однотактними системами називаються також системи, у яких вихідні сигнали визначаються комбінацією вхідних сигналів і не залежать від стану вихідних сигналів.
Приклади:
1. Синтезувати систему керування циліндром, шток якого висувається при включенні як мінімум 2-х перемикачів.
а) Складемо таблицю роботи представленого привода.
Таблиця 6.4 – Робота однотактної системи
| Х1 | Х2 | Х3 | F1 |
У таблиці позначені: Х1,2,3 – вхідні сигнали, f – вихідний сигнал.
б) Складемо рівняння вихідних сигналів, коли функція f = 1:
f = 1 × x2 × x3 + x1 ×2 × x3 + x1 × x2 ×3 + x1 × x2 × x3,
1 × x2 × x3 + x1 ×2 × x3 + x1 × x2 ×3 + x1 × x2 × x3,
в) Спростимо отримане рівняння, додавши до кожного зі складових виражень x1 × x2 × x3, то тоді одержимо:
f = (1× x2× x3 + x1× x2× x3) + (x1×2× x3+ x1× x2× x3) + (x1× x2 × 3 + x1× x2× x3).
3 + x1× x2× x3).
Використовуючи правило [ А + А + А = А ] і виносячи за дужки загальні члени, одержимо:
x2 × x3(1 + x1) + x1 × x3(2 + x2) + x1 × x2(3 + x3).
Вираз в дужках приймаємо рівним одиниці, тоді
f = x2 × x3 + x1 × x3 + x1 × x2 = x2 × x3 + x1(x2 + x3)
г) Будуємо структурну схему у виді рисунка (рисунок 6.8).
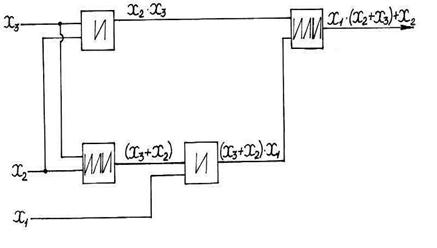
Рисунок 6.8 – Структурна схема керування циліндром
д) На підставі структурної схеми будуємо функціональну схему у вигляді рисунка (рисунок 6.9).
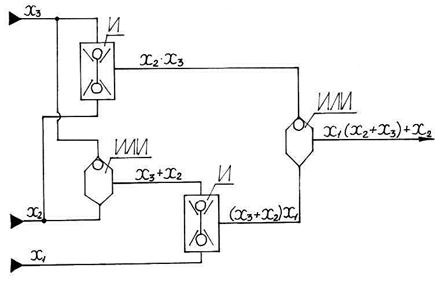
Рисунок 6.9 – Функціональна схема системи керування циліндром
е) Перевіряємо таблицю станів за функціональною схемою. Наприклад, рядок 2 (дивись таблицю станів) має лише сигнал Х3 =1. При цьому апарат “И” і тиск рідини защіпається, а апарат “ИЛИ” пропускає потік рідини. Однак, наступний апарат “И” защіпається (від сигналу Х3 ). У такий спосіб на виході із системи рідини нема, тобто в гідроциліндр рідина не надходить і f=0.
Аналогічним образом перевіряється робота системи по інших рядках таблиці.
2. Потрібно сортувати деталі типу циліндричних роликів, що контролюються по діаметру і по довжині вимірювальними датчиками сигналами х1, х2.
ролик

Рисунок 6.10 - Загальний вид стенда для сортування циліндричних роликів
Після контролю деталь скачується по похилій поверхні. Приймемо, якщо
х1 = 1, х2 = 1, то деталь придатна, відкривається люк 1 і деталь скачується в нього. Якщо х1 = 1, х2 = 0, тобто деталь бракована по довжині, то вона скачується в 3-й люк (1 і 2-й закриті). Якщо х1 = 0, х2 = 1, тобто деталь бракована по діаметру, то вона скачується в 2-й люк. Якщо х1 = 0, х2 = 0 т. е. деталь бракована по обох параметрах, то вона скачується в 4–й люк (1, 2, 3 –люки закриті).
Нехай люки відкриваються за допомогою циліндрів.
Складемо таблицю роботи системи в наступному вигляді, де прочерками позначені умовні стани (можуть бути відкритими чи закритими).
Таблиця 6.5 – Система з умовними тригерами
| X1 | ||||
| X2 | ||||
| Y1 | ||||
| Y2 | — | |||
| Y3 | — | — | ||
| Y4 | — | — | — |
З таблиці 6.5 випливає, що якщо замість прочерків узяти 1 – для вихідного сигналу, то останній люк повинний бути відкритий завжди.
Складемо рівняння вихідних сигналів у виді СДНФ (досконала дизьюктивна нормальна форма):
y1 = x1 × x2;
y2 = 1 × x2 ;
y3 = x1 × 2.
Цих рівнянь було б досить для схеми керування, але спростимо їх з метою зменшення кількості логічних елементів.
Спрощення отриманих рівнянь:
y1 = x1 × x2;
y2 = 1 × x2 + x1 × x2 = x2 (1 + x1);
y3 = x1 × 2 + x1 × x2 = x1 (2 + x2..).
У результаті система рівнянь вихідних сигналів приймає вид:
y1 = x1 × x2, y2= x2; y3= x1.
Для схемної реалізації даних потрібно тільки один логічний елемент “ И ”.
Структурна схема керування сортувальним автоматом має наступний вид (рисунок 6.11).
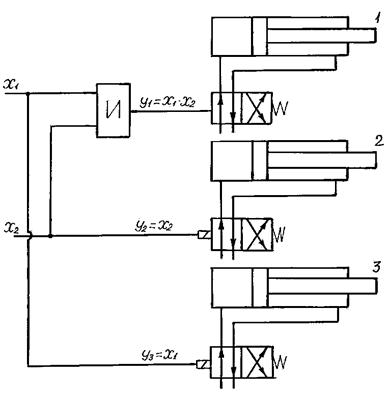
Рисунок 6.11 – Структурна схема сортувального автомата
|
Дата добавления: 2014-01-04; Просмотров: 279; Нарушение авторских прав?; Мы поможем в написании вашей работы!