КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні види механізмів та їх структурні схеми
|
|
|
|
Кінематичні ланцюги.
Кінематичним ланцюгом називають сукупність ланок, з’єднаних між собоюкінематичними парами.
Отже, в основі кожного механізму лежить кінематичний ланцюг. Але при цьому не всякий кінематичний ланцюг є механізмом. Кінематичний ланцюг - це будь-яке з’єднання ланок кінематичними парами. Механізм, призначений для отримання певних, наперед заданих рухів. Тільки той кінематичний ланцюг буде механізмом, ланки якого здійснюють доцільні рухи, що слідують з інженерних, виробничих задач, для виконання яких сконструйовано механізм. Тобто, ланки в механізмі з’єднуються не будь-яким чином, а за певними правилами.
Кінематичні ланцюги бувають: простими і складними, замкненими і незамкненими, плоскими і просторовими.
В простому ланцюзі кожна ланка входить в одну або дві кінематичні пари (рис. 1.3, a). Якщо хоча б одна ланка входить більше як до двох кінематичних пар, то такий ланцюг називається складним ( рис. 1.10, б, в, г).
Прості та складні кінематичні ланцюги, в свою чергу, поділяються на замкнені і незамкнені. Незамкненим називається ланцюг, у якого є ланка, що входить лише в одну кінематичну пару (рис. 1.4, ж). Замкненим називається ланцюг, кожна ланка якого входить не менш як у дві кінематичні пари (рис. 1.3, а). В замкненому ланцюзі ланки утворюють один або декілька контурів.
Плоским називають ланцюг, всі точки якого описують плоскі траєкторії або траєкторії що лежать в одній чи паралельних площинах (рис. 1.3, а). Просторовим називають ланцюг, у якого точки ланок описують просторові траєкторії, або траєкторії, розташовані в пересічних площинах (рис. 1.4).
Механізми поділяють, в першу чергу, на механізми з нижчими парами та механізми з вищими парами. Крім того, всі механізми можна поділити на плоскі та просторові (визначення плоских та просторових механізмів аналогічне до визначення плоских та просторових кінематичних ланцюгів).
|
|
|
Найрозповсюдженіші механізми з нижчими парами - важільні, клинові та гвинтові; з вищими парами - кулачкові, зубчасті, фрикційні, мальтійські та храпові (заскочкові). Нижче наведено приклади основних механізмів (їх схем), що застосовують у різних машинах.
Важільні механізми – це механізми, в яких ланки утворюють лише обертові, поступальні, циліндричні або сферичні кінематичні пари.
Плоскі важільні механізми (механізми, які мають тільки обертові та поступальні пари). Ці механізми знайшли широке застосування в машино- та приладобудуванні завдяки можливості забезпечення потрібного перетворення руху при простоті геометричної форми ланок та елементів кінематичних пар. Перевагами таких механізмів є висока технологічність виготовлення, можливість виконання шарнірних з’єднань на вальницях котіння, здатність передавати відносно великі зусилля, довговічність та надійність у роботі.
Кривошипно-повзунний механізм (рис. 1.1) - один із найпоширеніших, застосовується в поршневих машинах (двигунах внутрішнього згоряння, компресорах, помпах), у кувальних машинах та пресах, лісопильних рамах, приладах і т.ін. Цей механізм служить для перетворення обертового руху кривошипа 1 в поступальний рух повзуна 3, чи навпаки (ланка 2 – шатун, ланка 4 – стояк).
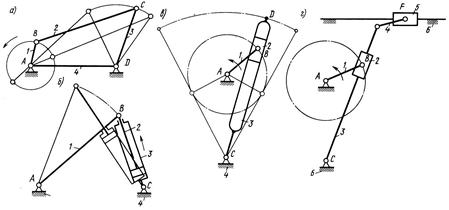
Рис. 1.3
Зазначимо, що в назвах низки механізмів відображені їх конструктивні ознаки та назви (характер руху) вхідної та вихідної ланок. Механізми, які мають тільки обертові пари, називають шарнірними.
Шарнірний чотириланковик (ланки з’єднані лише обертовими парами) служить для перетворення одного виду обертового руху в інший. В залежності від розмірів ланок може бути кривошипно-коромисловим, двокривошипним або двокоромисловим механізмом; застосовується у пресах та кувальних машинах, конвеєрах, прокатних станах, портальних кранах, у приводі коліс тепловозів, електровозів, вагових механізмів і т.ін. На рис. 1.3, а ланка 1– кривошип, 2 – шатун, 3 – коромисло, 4 – стояк (випадок кривошипно-коромислового механізму).
|
|
|
Кулісний механізм призначений для перетворення одного виду неперервного обертового руху ланки 1 - кривошипа в інший, ланки 3 – куліси (рис. 1.3, в), або обертового руху в поступальний - ланки 5 – повзуна (рис. 1.3, г). Ланка 2 – повзун, який в кулісних механізмах називається кулісним каменем. Особливістю кулісних механізмів є прискорений зворотній хід куліси. Такі чотири-та шестиланкові кулісні механізми застосовують у строгальних і довбальних верстатах, поршневих помпах та компресорах, гідроприводах (куліса з каменем являє собою циліндр 3 з поршнем зі штоком 2, рис. 1.3, б) і т.ін. В кулісному механізмі, в залежності від розмірів ланок, куліса може виконувати коливальний, обертовий рух або рухатись поступально.
Відмітимо, що в сучасному машинобудуванні найширше застосовують плоскі механізми. Механізми зі складними структурно-кінематичними схемами в більшості випадків, за основну перетворювальну рух частину мають один з розглянутих вище типів механізмів.
Просторові механізми з нижчими парами. Просторові важільні механізми в багатьох випадках забезпечують виконання потрібного виду руху точніше та меншим числом ланок у порівнянні з плоскими механізмами, тобто дозволяють уникнути застосування складних структурних схем: забезпечують передачу руху між осями довільно розміщеними в просторі.
Просторовий шарнірний чотириланковик (рис. 1.4, а - модель, б - схема): 1 – кривошип, 2 – шатун, 3 – коромисло, 4 – стояк; просторовий кривошипно-повзунний механізм (рис. 1.4, в, г) 1 – кривошип, 2 – шатун, 3 – повзун, 4 – стояк; механізм універсального шарніра (шарніра Гука, або карданної передачі рис. 1.4, д, е). Цей механізм призначений для передачі обертового руху між валами, осі яких перетинаються, при цьому кут між ними може змінюватися під час руху. Особливістю механізму є те, що при обертанні вхідного вала (вилки) 1 з сталою кутовою швидкістю вихідний вал (вилка) 3 буде обертатися нерівномірно, при чому, чим більший кут між осями, тим більша нерівномірність обертання (ланка 2 – хрестовина). На рис. 1.4, ж наведена структурна схема механізму маніпулятора промислового робота (ланки 1-6 – рухомі, 0 – стояк, F – захват).
|
|
|
Приклади механізмів (плоских і просторових) з вищими парами. Найширше застосування в машинах та приладах знаходять зубчасті механізми. Найпростіша зубчаста передача складається зі стояка та двох рухомих коліс, на ободі яких розміщені зубці. Зубці коліс входять почергово у зачеплення між собою та завдяки взаємодії забезпечують передачу обертового руху. В зубчастій передачі розрізняють зовнішнє, внутрішнє та рейкове зачеплення (рис. 1.5, а, б, в). Менше з двох спряжених коліс називають шестірнею 1, більше - колесом 2 (або частковий випадок - рейка). За взаємним розміщенням осей коліс зубчасті передачі бувають:
- з паралельними осями (рис. 1.5, а, б, циліндричні передачі);
- з осями які перетинаються (рис. 1.5, г, конічні передачі);
- з мимобіжними осями (рис. 1.5, д, е, є, відповідно гвинтові, черв’ячні та гіпоїдні передачі).
В кулачкових (плоских та просторових) механізмах, вища пара утворена ланками, що називаються кулачок (шайба змінної кривини профілю) 1 і штовхач 2 (рис. 1.6, а), або кулачок та коромисло 2 (рис. 1.6, б). Потрібний закон руху забезпечується відповідним профілем кулачка.
Найважливішою позитивною якістю кулачкових механізмів є можливість отримувати різноманітніші закони руху вихідної ланки, у тому числі із зупинками; простота методів синтезу.
Зазначимо, що у курсі ТММ детальніше вивчаються три основні типи механізмів: плоскі важільні, зубчасті, кулачкові механізми.
У фрикційному механізмі передача обертового руху здійснюється за допомогою сил тертя. Найпростіша циліндрична фрикційна передача складається зі стояка та двох циліндричних коліс 1, 2, які робочими поверхнями притиснуті настільки, що сила тертя, яка виникає між ними, дає змогу їм передавати рух (рис. 1.7, а). Однією із важливіших переваг фрикційних передач є можливість плавного безступінчастого регулювання передатного відношення. Лобова фрикційна передача (рис. 1.7, б), в якій ролик 1 може встановлюватися на різних відстанях від осі обертання ланки 2 забезпечує плавну зміну кутової швидкості і напряму обертання вихідної ланки.
|
|
|
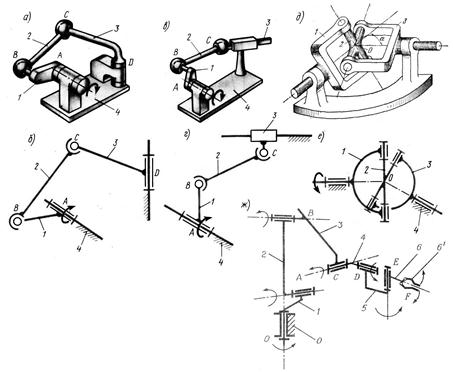
Рис. 1.4
У машинобудуванні та приладобудуванні застосовують велику кількість різноманітних механізмів, загальна кількість їх обчислюється тисячами. Розглянуті вище механізми найтиповіші.

Рис. 1.5
Об’єм конспекту не дозволяє детальніше зупинитись на цьому питанні. Тим більше, що даний матеріал є оглядовий, з яким легко ознайомитись самостійно за рекомендованою літературою.

Рис. 1.6
Опис значно більшого числа механізмів наведений у спеціальних довідкових виданнях (Артоболевский И.И. Механизмы в современной технике. В 7т. - М.: Наука, 1979-1981; Кожевников С.Н. и др. Механизмы: Справочник. - М.: Машиностроение, 1976; Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987).
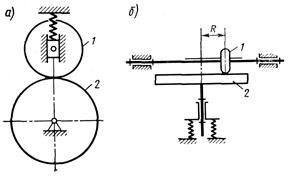
Рис. 1.7
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 2533; Нарушение авторских прав?; Мы поможем в написании вашей работы!