КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод планів швидкостей та прискорень
|
|
|
|
Методи графічного диференціювання та інтегрування при всій їх простоті та наочності не розв’язують повністю питання кінематики. Діаграми переміщень, швидкостей та прискорень дають лише скалярні кінематичні величини, а напрями векторів цих величин невідомі. Цього недоліку позбавлений графоаналітичний метод, що ґрунтується на побудові планів швидкостей та прискорень (векторний спосіб); метод в достатній мірі розроблений, точний і зручний у практичному застосуванні, особливо, коли треба визначити швидкості і прискорення для конкретного положення механізму.
Теоретичні основи побудови планів швидкостей і прискорень розглядаються в курсі теоретичної механіки. За основу цього методу взята можливість розкласти складний рух точки або ланки на простіші, шляхом введення додаткової (рухомої) системи відліку. Залежності між кінематичними характеристиками абсолютного, переносного та відносного рухів точки (ланки) записуються у векторній формі та представляються у вигляді планів швидкостей та прискорень. Плани викреслюються у відповідних масштабах, що дозволяє отримати числові значення кінематичних характеристик.
Планом швидкостей (прискорень) механізму називають креслення, на якому зображені у вигляді напрямлених відрізків вектори, які у масштабі визначають модуль та напрям швидкостей (прискорень) різних точок ланок для даного положення механізму. План швидкостей (прискорень) механізму є сукупністю планів швидкостей (прискорень) окремих ланок, що побудовані з одного полюса, спільного для всі ланок.
Кінематичний аналіз механізму проводиться у такому порядку:
- спочатку визначаються кінематичні параметри початкової ланки;
|
|
|
- далі виконується кінематичне дослідження окремих структурних груп Ассура в послідовності їх приєднання до початкової ланки при утворенні механізму. При цьому, кожна ланка механізму розглядається як така, що здійснює плоский рух; необхідно визначити швидкість і прискорення щонайменше двох її точок. Цими точками є центри шарнірів обертальних пар і однойменні точки елементів поступальних кінематичних пар. Як сказано, побудова планів виконується по структурних групах в порядку їх приєднання, починаючи з початкової ланки. У цьому випадку у кожній групі Ассура будуть відомі швидкості та прискорення зовнішніх кінематичних пар, якими приєднується дана група. Дослідження кожної групи повинно розпочинатись з визначення кінематичних параметрів внутрішньої пари, яка є спільною для ланок, що утворюють цю пару. Потім, при потребі, визначаються кінематичні параметри інших характерних точок групи та кутові швидкості і прискорення ланок.
При кінематичному аналізі механізму спочатку будується план швидкостей, а потім план прискорень.
Плани швидкостей та прискорень початкової ланки. Зазвичай, початкова ланка механізму здійснює обертальний рух (рис. 2.8, а). Швидкість  точки А перпендикулярна до кривошипа ОА (напрямлена по дотичній до траєкторії т .А) і спрямована у бік його обертання. Зобразимо швидкість точки А деяким вектором, відкладеним з довільної точки рv, яку приймаємо за полюс плану швидкостей (рис. 2.8, б). Цей вектор перпендикулярний до прямої ОА і напрямлений в бік обертання кривошипа. В кінці вектора поставимо точку а. Довжина відрізка рvа може бути прийнята довільною. Переважно вона вибирається при визначенні масштабу
точки А перпендикулярна до кривошипа ОА (напрямлена по дотичній до траєкторії т .А) і спрямована у бік його обертання. Зобразимо швидкість точки А деяким вектором, відкладеним з довільної точки рv, яку приймаємо за полюс плану швидкостей (рис. 2.8, б). Цей вектор перпендикулярний до прямої ОА і напрямлений в бік обертання кривошипа. В кінці вектора поставимо точку а. Довжина відрізка рvа може бути прийнята довільною. Переважно вона вибирається при визначенні масштабу  ,
,  , з урахуванням рекомендацій з вибору масштабів; модуль швидкості т. А визначається за формулою vA = ωlOA, м/с, для визначення кутової швидкості користуються формулою
, з урахуванням рекомендацій з вибору масштабів; модуль швидкості т. А визначається за формулою vA = ωlOA, м/с, для визначення кутової швидкості користуються формулою  ,
,  ; де п – частота обертання. Аналогічні міркування проводять, при потребі, відносно будь-якої іншої точки кривошипа. Звичайно, швидкості та прискорення точок, що належать осі обертання, дорівнюють нулю і, відповідно, на планах вони знаходяться в полюсі (т. О, S). Отже, вектор
; де п – частота обертання. Аналогічні міркування проводять, при потребі, відносно будь-якої іншої точки кривошипа. Звичайно, швидкості та прискорення точок, що належать осі обертання, дорівнюють нулю і, відповідно, на планах вони знаходяться в полюсі (т. О, S). Отже, вектор  представляє собою план швидкостей початкової ланки для положення, що визначається кутовою координатою
представляє собою план швидкостей початкової ланки для положення, що визначається кутовою координатою  .
.
|
|
|
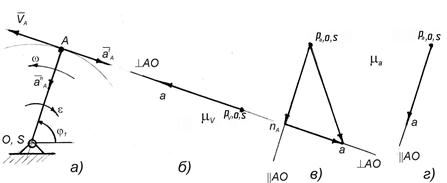
Рис. 2.8
Відмітимо, що зображення точок ланок (для розглядуваного прикладу О, S, A) на плані швидкостей позначаються малими літерами (о, s, а).
На рис. 2.8, в, зображений план прискорень початкової ланки. Він побудований за відомими співвідношеннями:
- повне прискорення т. А при обертальному русі ланки дорівнює геометричній сумі нормального і дотичного (тангенціального) прискорень,  ;
;
- модуль нормального прискорення т. А,  ;
;
- модуль дотичного прискорення т. А,  .
.
Масштаб плану прискорень визначається за формулою  ,
,  , попередньо задавшись довжиною відрізка
, попередньо задавшись довжиною відрізка  , що зображує
, що зображує  нормальне прискорення на плані. Прийнявши довільну точку
нормальне прискорення на плані. Прийнявши довільну точку  за полюс плану прискорень, відкладемо вектор у вигляді відрізка . При цьому вектор нормального прискорення, яке ще називають доцентровим, направлений по радіусу обертання до центра кривини траєкторії, // АО, має напрям від точки А до О. Далі визначають
за полюс плану прискорень, відкладемо вектор у вигляді відрізка . При цьому вектор нормального прискорення, яке ще називають доцентровим, направлений по радіусу обертання до центра кривини траєкторії, // АО, має напрям від точки А до О. Далі визначають  – довжину відрізка, що зображає
– довжину відрізка, що зображає  дотичне прискорення на плані прискорень. Вектор дотичного прискорення напрямлений по дотичній до траєкторії руху (перпендикулярно радіусу обертання) в бік напрямку кутового прискорення
дотичне прискорення на плані прискорень. Вектор дотичного прискорення напрямлений по дотичній до траєкторії руху (перпендикулярно радіусу обертання) в бік напрямку кутового прискорення  ,
,  . Відкладаємо з точки
. Відкладаємо з точки  плану відрізок
плану відрізок  і отримуємо вектор
і отримуємо вектор  повного прискорення точки А.
повного прискорення точки А.
Відзначимо, що переважно в задачах кінематики приймається, що початкова ланка обертається рівномірно ( ), тобто
), тобто  , а отже
, а отже  , і
, і  . У цьому випадку план прискорень має вигляд, зображений на рис. 2.8, г.
. У цьому випадку план прискорень має вигляд, зображений на рис. 2.8, г.
Плани швидкостей та прискорень при складному русі ланки. Складним рухом ланки (точки) називається такий рух, при якому ланка одночасно бере участь у двох або більше рухах. Рух, що здійснює ланка (точка) по відношенню до рухомої системи відліку називається відносним рухом. Рух, що здійснює рухома система відліку по відношенню до нерухомої системи називається переносним рухом. Рух, що здійснює ланка (точка) по відношенню до нерухомої (основної) системи відліку, називається абсолютним або складним.
|
|
|
Нагадаємо теореми про додавання швидкостей та прискорень точки в її складному русі: абсолютна швидкість va точки дорівнює векторній сумі її переносної ve і відносної vr швидкостей, тобто
 .
.
Дана теорема ще носить назву паралелограма або трикутника швидкостей. Абсолютна швидкість знаходиться шляхом побудови паралелограма швидкостей. Вектори  ,
,  ,
,  швидкостей мають напрямки по дотичній до відповідної траєкторії. Абсолютне прискорення
швидкостей мають напрямки по дотичній до відповідної траєкторії. Абсолютне прискорення  довільної точки ланки дорівнює векторній сумі переносного
довільної точки ланки дорівнює векторній сумі переносного  , відносного
, відносного  і коріолісового
і коріолісового  прискорень, тобто
прискорень, тобто
 .
.
Якщо переносний рух поступальний, то абсолютне прискорення точки дорівнює геометричній сумі двох прискорень: переносного та відносного. В свою чергу, при відносному обертальному русі прискорення можна розкласти на два прискорення
 .
.
Методика побудови планів швидкостей та прискорень для двоповодкових груп полягає у складанні аналогічних векторних рівнянь для кожної ланки та спільному їх графічному розв’язку.
Для прикладу розглянемо групу Ассура ІІ класу ІІ порядку першого виду (рис. 2.9). Швидкості точок А і С (якими група приєднується до механізму) відомі. Знайдемо швидкість точки В, яка є спільною для ланок 2 та 3. Для цього рух ланки 2 розкладаємо на переносний поступальний зі швидкістю точки А і відносний обертальний рух навколо цієї точки зі швидкістю  . Для ланки 3 аналогічно – на переносний поступальний зі швидкістю
. Для ланки 3 аналогічно – на переносний поступальний зі швидкістю  т. С і відносний обертальний - навколо точки С зі швидкістю
т. С і відносний обертальний - навколо точки С зі швидкістю  . Скориставшись теоремою про додавання швидкостей точки в її складному русі, запишемо векторні рівняння, що зв’язують швидкості точок В, А та С
. Скориставшись теоремою про додавання швидкостей точки в її складному русі, запишемо векторні рівняння, що зв’язують швидкості точок В, А та С
 , (2.2)
, (2.2)
 .
.
Інколи, для наочності, праві частини співвідношень (2.2) прирівнюють
 . (2.3)
. (2.3)
Зазначимо, що такі векторні рівняння розв’язуються графічно, якщо вони містять не більше двох невідомих параметрів. Розглядувана група Ассура може бути приєднана лише до початкової ланки та стояка чи до раніше приєднаних (і відповідно розглянутих) груп Ассура, кінематичні параметри яких вже відомі. Отже, параметри переносного руху будуть визначеними. Вектори відносних швидкостей  в обертальному русі відомі лише за напрямком - перпендикулярні до відповідної ланки (по дотичній до траєкторії руху).
в обертальному русі відомі лише за напрямком - перпендикулярні до відповідної ланки (по дотичній до траєкторії руху).
|
|
|
Відзначимо, що при аналізі векторних рівнянь часто прийнято підкреслювати вектор двома рисками, якщо він відомий як за величиною, так і за напрямком, і однією – якщо тільки за величиною або напрямком.
Графічний розв’язок рівняння (2.3) наведено на рис. 2.9, б у вигляді плану швидкостей. Для його побудови вибираємо довільну точку  - полюс плану швидкостей. Від неї відкладаємо вектор відомої швидкості . Отримуємо точку а на плані швидкостей. Далі, згідно з рівнянням (2.3), до вектора швидкості треба додати вектор швидкості . Для цього проводимо через точку а лінію, яка показує напрямок вектора відносної швидкості – перпендикуляр до ланки АВ (
- полюс плану швидкостей. Від неї відкладаємо вектор відомої швидкості . Отримуємо точку а на плані швидкостей. Далі, згідно з рівнянням (2.3), до вектора швидкості треба додати вектор швидкості . Для цього проводимо через точку а лінію, яка показує напрямок вектора відносної швидкості – перпендикуляр до ланки АВ ( ). Такі ж міркування можна привести при розгляді правої частини рівняння (2.3). У розглядуваному прикладі точка С ланки 3 приєднана до стояка,
). Такі ж міркування можна привести при розгляді правої частини рівняння (2.3). У розглядуваному прикладі точка С ланки 3 приєднана до стояка,  . Отже, на плані швидкостей т. С знаходиться у полюсі. До вектора швидкості треба додати вектор швидкості . Для цього проводимо через полюс
. Отже, на плані швидкостей т. С знаходиться у полюсі. До вектора швидкості треба додати вектор швидкості . Для цього проводимо через полюс  лінію, яка показує напрямок вектора відносної швидкості – перпендикуляр до ланки ВС (
лінію, яка показує напрямок вектора відносної швидкості – перпендикуляр до ланки ВС ( ). Точка перетину в цих ліній визначить величину та напрямок швидкості точки В.
). Точка перетину в цих ліній визначить величину та напрямок швидкості точки В.
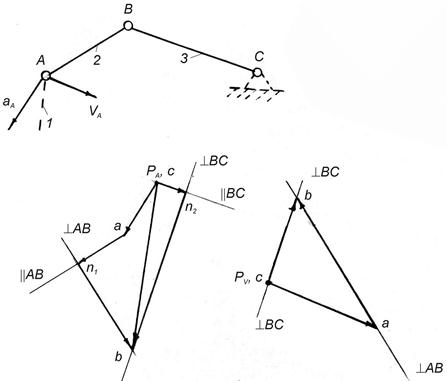
Рис. 2.9
Рівняння, які використовуються при побудові плану прискорень, відрізняються лише тим, що невідомі відносні прискорення точки у обертальному русі розкладають на складові
 , (2.4)
, (2.4)
 .
.
Виконаємо графічне додавання векторів згідно з рівняннями (2.4). З довільної точки полюса плану прискорень відкладаємо, в масштабі  , вектор відомого прискорення т. А. З кінця цього вектора, точка а, відкладемо вектор
, вектор відомого прискорення т. А. З кінця цього вектора, точка а, відкладемо вектор  нормального прискорення точки В навколо т. А. Нормальне прискорення напрямлене по лінії АВ до центра обертання - точки А. Модуль його порахований після побудови плану швидкостей за формулою
нормального прискорення точки В навколо т. А. Нормальне прискорення напрямлене по лінії АВ до центра обертання - точки А. Модуль його порахований після побудови плану швидкостей за формулою  . Довжина відрізка, який зображає на плані прискорень, дорівнює
. Довжина відрізка, який зображає на плані прискорень, дорівнює  . Через його кінець (точку
. Через його кінець (точку  ) проводимо лінію дотичного прискорення
) проводимо лінію дотичного прискорення  , направленого перпендикулярно до АВ.
, направленого перпендикулярно до АВ.
Розглянемо друге рівняння. З полюса ( ) відкладемо вектор, який зображає
) відкладемо вектор, який зображає  , нормальне прискорення, у вигляді відрізка
, нормальне прискорення, у вигляді відрізка  (
( , має напрям від точки В до А). Через його кінець (точку
, має напрям від точки В до А). Через його кінець (точку  ) проведемо лінію-напрямок дотичного прискорення
) проведемо лінію-напрямок дотичного прискорення  до перетину з лінією напрямком прискорення . Точка перетину в цих ліній визначить величину та напрямок прискорень точки В та величини дотичних прискорень (у масштабі ).
до перетину з лінією напрямком прискорення . Точка перетину в цих ліній визначить величину та напрямок прискорень точки В та величини дотичних прискорень (у масштабі ).
Розглянуті положення використовуються при побудові планів швидкостей і прискорень плоских механізмів. Розглянемо методику побудови планів швидкостей та прискорень механізмів ІІ класу.
Приклад. Шестиланковий важільний механізм зі структурними групами Ассура ІІ класу першого та другого видів (рис. 2.10). Задано план механізму та закон руху початкової ланки (). Кінематичне дослідження будемо проводити у такій послідовності: спочатку побудуємо плани для початкової ланки 1, потім для групи Ассура ІІ (2, 3), а далі для групи ІІ (4, 5).
Визначимо модуль лінійної швидкості т. А ланки О1 А, при обертанні її навколо т. О1, за формулою  .
.
З довільно взятої точки рv полюса плану швидкостей відкладаємо відрізок рva, перпендикулярний до ланки  і напрямлений в бік руху кривошипа. Швидкість т .А на плані швидкостей показано відрізком рva, тобто масштаб плану швидкостей
і напрямлений в бік руху кривошипа. Швидкість т .А на плані швидкостей показано відрізком рva, тобто масштаб плану швидкостей  .
.
Переходимо до побудови плану швидкостей першої групи Ассура. Швидкості точок А та  , що належать до зовнішніх кінематичних пар цієї групи, відомі (
, що належать до зовнішніх кінематичних пар цієї групи, відомі ( ;
;  ).
).
Для визначення швидкості т. В, що одночасно належить ланкам 2 та 3, запишемо два векторні рівняння
 ,
,
 .
.
Розв’язуємо цю систему рівнянь графічно. Згідно з першим рівнянням, через т. а плану швидкостей проводимо пряму, перпендикулярну до ланки АВ (до вектора швидкості  додаємо вектор швидкості
додаємо вектор швидкості  ). Згідно з другим рівнянням, через полюс рv проводимо пряму, перпендикулярну до ланки
). Згідно з другим рівнянням, через полюс рv проводимо пряму, перпендикулярну до ланки  (до швидкості т., яка дорівнює нулю і, отже, знаходиться в полюсі, додаємо вектор швидкості
(до швидкості т., яка дорівнює нулю і, отже, знаходиться в полюсі, додаємо вектор швидкості  ). Точка перетину b цих перпендикулярів є кінцем вектора pvb, що зображує на плані у масштабі
). Точка перетину b цих перпендикулярів є кінцем вектора pvb, що зображує на плані у масштабі  абсолютну швидкість т .В. Величини невідомих швидкостей визначають за формулами
абсолютну швидкість т .В. Величини невідомих швидкостей визначають за формулами
 ,
,  ,
,
тобто, вимірявши відповідні відрізки на плані швидкостей в мм, множимо їх на масштаб і одержуємо модулі шуканих швидкостей.
Кутові швидкості ланок 2 та 3 визначаються рівностями
 ,
,  .
.
Визначимо швидкості інших точок, що належать до ланок даної групи. Аналогічно до точки В, розглянемо рух точки С по відношенню до точок В та і запишемо два векторні рівняння
 ,
,
 .
.
Швидкості точок В та відомі. Відносні швидкості  і
і  , як швидкості в обертальному русі перпендикулярні, відповідно, до ланок ВС та С. Отже, згідно з першим рівнянням, проведемо через т. b на плані швидкостей лінію, перпендикулярну до ланки ВС, а згідно з другим – через т. pv – лінію, перпендикулярну до ланки С. На їх перетині дістанемо точку с, яка є кінцем вектора pvс, що зображає на плані швидкостей в масштабі абсолютну швидкість т. С;
, як швидкості в обертальному русі перпендикулярні, відповідно, до ланок ВС та С. Отже, згідно з першим рівнянням, проведемо через т. b на плані швидкостей лінію, перпендикулярну до ланки ВС, а згідно з другим – через т. pv – лінію, перпендикулярну до ланки С. На їх перетині дістанемо точку с, яка є кінцем вектора pvс, що зображає на плані швидкостей в масштабі абсолютну швидкість т. С;  .
.
Як слідує з виконаної побудови, трикутник ВС на плані механізму, подібний до трикутника bpvc на плані швидкостей ( ,
,  ,
,  ). При цьому, трикутники
). При цьому, трикутники  та
та  повернуті, один відносно одного, на прямий кут в напрямку миттєвого обертання. Цю властивість подібності фігури відносних швидкостей на плані швидкостей (прискорень), до фігури ланки на схемі механізму, називають теоремою подібності: план відносних швидкостей (прискорень) точок однієї і тієї ж ланки, подібний до відповідної фігури на схемі механізму.
повернуті, один відносно одного, на прямий кут в напрямку миттєвого обертання. Цю властивість подібності фігури відносних швидкостей на плані швидкостей (прискорень), до фігури ланки на схемі механізму, називають теоремою подібності: план відносних швидкостей (прискорень) точок однієї і тієї ж ланки, подібний до відповідної фігури на схемі механізму.
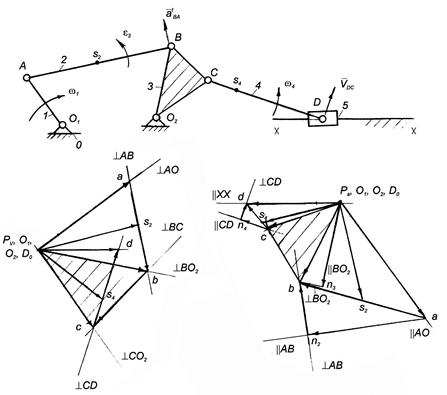
Рис. 2.10
Відзначимо, що теорема подібності дійсна також при побудові планів прискорень. Вона дає можливість легко визначити швидкості будь-яких точок ланки, якщо відомі швидкості двох інших точок цієї ланки.
Таким чином, швидкість точки С зручніше знаходити за теоремою подібності. Для цього на відрізку pvb, на плані швидкостей будуємо трикутник  , подібний трикутнику ВС на плані механізму. Згідно теореми подібності можна записати такі пропорції
, подібний трикутнику ВС на плані механізму. Згідно теореми подібності можна записати такі пропорції
 , або
, або 
з яких визначаємо довжини відрізків сpv та bc:


де  – дійсні розміри ланок,
– дійсні розміри ланок,  – розміри ланок на схемі механізму;
– розміри ланок на схемі механізму;  – відповідні відрізки на плані швидкостей.
– відповідні відрізки на плані швидкостей.
Зробивши засічки з точки pv плану швидкостей радіусом pvc, а з точки b – радіусом bc, знайдемо точку с. Щоб не допустити помилки при визначенні положення точки с на плані швидкостей (засічку можна зробити по обидва боки від лінії pvb), потрібно користуватися правилом обходу: якщо обходити план швидкостей і ланку в одному напрямку, наприклад, за рухом стрілки годинника, починаючи відповідно з точок і , то порядок літер для них має бути однаковим -  та
та  . Зазначимо, що теорема подібності справедлива лише для незмінної системи твердого тіла, тобто однієї ланки. Одночасно для декількох ланок, групи Ассура чи механізму в цілому вона не дійсна.
. Зазначимо, що теорема подібності справедлива лише для незмінної системи твердого тіла, тобто однієї ланки. Одночасно для декількох ланок, групи Ассура чи механізму в цілому вона не дійсна.
Швидкості центрів мас ланок знаходять, користуючись теоремою подібності. Наприклад, якщо задано, що центр мас другої ланки - точка  лежить на середині ланки АВ, то на плані швидкостей т.знаходиться також на середині відрізка ab. З’єднавши на плані точку
лежить на середині ланки АВ, то на плані швидкостей т.знаходиться також на середині відрізка ab. З’єднавши на плані точку  з полюсом, знаходимо вектор швидкості
з полюсом, знаходимо вектор швидкості  центра мас шатуна 2. Модуль вектора швидкості визначається за формулою
центра мас шатуна 2. Модуль вектора швидкості визначається за формулою
 .
.
Переходимо до визначення швидкостей точок другої групи Ассура, яка складається з ланок 4 та 5. Знайдемо швидкість центра шарніра D, що з’єднує ланки 4 та 5 ( ). Розглядаючи рух т. D по відношенню до т. C, а потім – до т. D0 (точки, що належить напрямній хх, і в даному положенні механізму співпадає з точкою D на повзуні), запишемо два векторні рівняння
). Розглядаючи рух т. D по відношенню до т. C, а потім – до т. D0 (точки, що належить напрямній хх, і в даному положенні механізму співпадає з точкою D на повзуні), запишемо два векторні рівняння
 ,
,
 .
.
Відзначимо, що для таких структурних груп обмежуються першим рівнянням; повзун 5 рухається по нерухомій напрямній і абсолютна швидкість кожної його точки паралельна напрямній, vD // xx. При графічному розв’язку цих рівнянь достатньо через т. с плану швидкостей провести пряму, перпендикулярну до ланки CD на плані механізму, а через полюс pV – пряму, паралельну до напрямної хх. На перетині цих прямих і буде шукана т. d.
Швидкість центра мас S4 знаходимо за теоремою подібності, в загальному випадку, із співвідношення
 , або
, або  , звідки
, звідки  ,
,
де  ,
,  – дійсні розміри ланок,
– дійсні розміри ланок,  ,
,  – розміри ланок на схемі механізму;
– розміри ланок на схемі механізму;  ,
,  – відповідні відрізки на плані швидкостей.
– відповідні відрізки на плані швидкостей.
З’єднавши з полюсом знайдену точки s4, отримуємо вектор, який зображає на плані швидкість даної точки.
Підкреслимо, що, маючи план швидкостей механізму, можна визначити абсолютну та відносну швидкості будь-якої з точок механізму: вимірявши відповідний відрізок в мм на плані швидкостей, множимо його на масштаб плану і одержуємо величину відповідної швидкості. Наприклад,
 ,
,  ,
,  .
.
Кутову швидкість ланки 4 визначаємо за формулою  . Напрямки кутових швидкостей ланок знаходимо за допомогою умовного переносу векторів відносних швидкостей на схему механізму. Наприклад, для ланки 4 швидкість
. Напрямки кутових швидкостей ланок знаходимо за допомогою умовного переносу векторів відносних швидкостей на схему механізму. Наприклад, для ланки 4 швидкість  , яка на плані швидкостей зображена вектором
, яка на плані швидкостей зображена вектором  ,умовно переносимо в т. D на схемі механізму. Вектор вказує на умовне обертання ланки 4 навколо т. С проти ходу годинникової стрілки і, отже,
,умовно переносимо в т. D на схемі механізму. Вектор вказує на умовне обертання ланки 4 навколо т. С проти ходу годинникової стрілки і, отже,  також напрямлена проти руху стрілки годинника.
також напрямлена проти руху стрілки годинника.
Побудова плану прискорень. Послідовність побудови плану прискорень така ж, як для плану швидкостей.
Повне прискорення т. А кривошипа 1 дорівнює геометричній сумі нормального та дотичного прискорень. У розглядуваному прикладі початкова ланка обертається рівномірно (, , ), тому . Модуль цього прискорення находять зі співвідношення  або
або  .
.
З точки pа відкладемо паралельно до кривошипа O1A (у напрямку від т. А до т. О1) відрізок довільної довжини paa. Тоді масштаб плану прискорень  .
.
Розглянемо групу Ассура ІІ(2, 3). Для неї відомі прискорення точок А та О2. Визначимо прискорення центра шарніра В. Розглядаючи рух т. В по відношенню до т. А, а потім - до т.О2 запишемо, відповідно, два векторні рівняння
 ,
,
 . (2.5)
. (2.5)
Обчислимо величини нормальних складових  ,
,  та довжини відрізків, які будуть зображати їх на плані,
та довжини відрізків, які будуть зображати їх на плані,  ,
,  .
.
Після цього можна векторні рівняння (2.5) розв’язувати графічно. Згідно з першим рівнянням, з точки a плану прискорень відкладаємо відрізок an2, що напрямлений паралельно до ланки AВ у напрямку від т. В до т. А. Через його кінець – т. n2 проводимо пряму, перпендикулярну до АВ (напрям  ). Згідно з другим рівнянням, з полюса pa паралельно до ВО2, у напрямку від т. В до т. О2, відкладаємо відрізок pan3.. Через т .n3 проводимо перпендикуляр до ВО2 (напрям
). Згідно з другим рівнянням, з полюса pa паралельно до ВО2, у напрямку від т. В до т. О2, відкладаємо відрізок pan3.. Через т .n3 проводимо перпендикуляр до ВО2 (напрям  ). На перетині дотичних складових (перпендикулярів) отримаємо шукану точку b.
). На перетині дотичних складових (перпендикулярів) отримаємо шукану точку b.
Відрізок pab зображає, в масштабі , абсолютне прискорення точки b; відрізки n2b та n3b – відповідно, невідомі дотичні складові ,  , а відрізок ab - повне відносне прискорення
, а відрізок ab - повне відносне прискорення  т. В відносно т. А.
т. В відносно т. А.
Прискорення точок S2 та С знайдемо за теоремою подібності: точку s2 на плані прискорень розмістимо на середині відрізка ba (у даному прикладі центр мас S2 знаходиться по середині ланки АВ). Відрізок pas2 зображає прискорення т. S2; з пропорції  вираховуємо довжини відрізків bc та cpa та методом засічок знаходимо точку с на плані прискорень. При цьому має бути збережена схожість фігур ВСО2 на схемі механізму та bcpa на плані прискорень.
вираховуємо довжини відрізків bc та cpa та методом засічок знаходимо точку с на плані прискорень. При цьому має бути збережена схожість фігур ВСО2 на схемі механізму та bcpa на плані прискорень.
Наступна структурна група утворена ланками 4 та 5. Повзун 5 рухається по нерухомій напрямній. Абсолютне прискорення кожної його точки паралельне цій напрямній. Дана умова дозволяє записати одне рівняння для визначення прискорення точки D
 .
.
Визначаємо нормальне прискорення  та відрізок, що буде зображати його на плані прискорень,
та відрізок, що буде зображати його на плані прискорень,
 .
.
Виконаємо графічну побудову. З точки с плану прискорень паралельно до ланки CD в напрямку від т. D до т. С відкладемо відрізок cn4. Через т. n4 проводимо перпендикуляр до CD (напрям вектора  ). Через полюс pa проводимо пряму, паралельну до напрямної (напрям вектора абсолютного прискорення
). Через полюс pa проводимо пряму, паралельну до напрямної (напрям вектора абсолютного прискорення  ). Ці лінії перетнуться в шуканій точці d. Згідно співвідношення
). Ці лінії перетнуться в шуканій точці d. Згідно співвідношення  на відрізку dc розмістимо т. s4. План прискорень побудований. Величини прискорень точок механізму дорівнюють добутку довжини відповідного відрізка з плану прискорень на масштаб плану. Наприклад:
на відрізку dc розмістимо т. s4. План прискорень побудований. Величини прискорень точок механізму дорівнюють добутку довжини відповідного відрізка з плану прискорень на масштаб плану. Наприклад:
 ,
,  .
.
Визначимо кутові прискорення ланок
 ,
,  ,
,  .
.
Для визначення напрямку кутового прискорення, наприклад, другої ланки  , переносимо вектор дотичного прискорення (на плані прискорень зображений відрізком n2b) у точку В. Перенесений вектор вказує на умовне обертання ланки 2 навколо т. А проти руху годинникової стрілки. Це і буде напрям кутового прискорення.
, переносимо вектор дотичного прискорення (на плані прискорень зображений відрізком n2b) у точку В. Перенесений вектор вказує на умовне обертання ланки 2 навколо т. А проти руху годинникової стрілки. Це і буде напрям кутового прискорення.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 13033; Нарушение авторских прав?; Мы поможем в написании вашей работы!