КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Работа станка и его наладка (по кинематической схеме)
Движения в станке. Движение шпинделю станка передается от двухскоростного электродвигателя (N = 3,3/3,8 квт, n = 940/2800 об/мин) через коробку скоростей (рис. 3.18,а). При рабочем ходе частота вращения электродвигателя равна 940 об/мин, а при обратном — 2800 об/мин. Коробка скоростей позволяет получать 12 прямых и 12 обратных величин частот вращения шпинделя. Включение любой из ступеней скорости вращения шпинделя производится переключением блоков, расположенных на валах II, IV и V коробки. Расчетные перемещения для цепи скорости резания
n об/мин электродвигателя → n об/мин шпинделя.
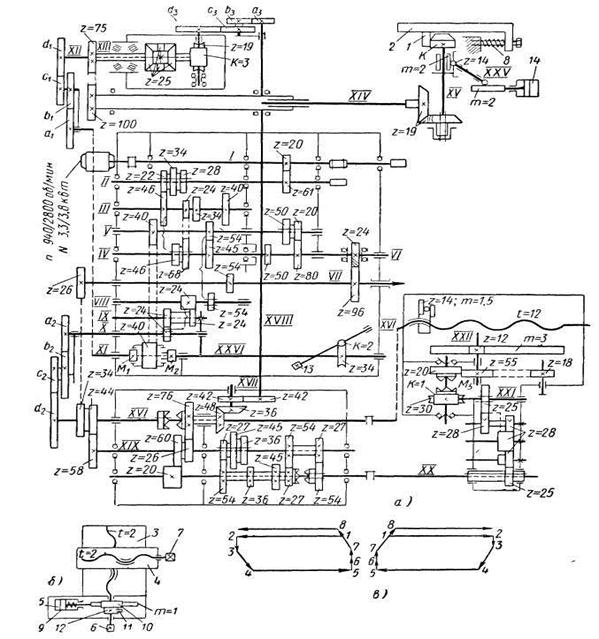
Рис. 3.23. Кинематическая схема токарно-затыловочного станка 1811
Уравнения кинематической цепи при рабочем ходе для предельных значений частот вращения:

Продольная подача суппорта от ходового вала осуществляется при выключенной гайке ходового винта и включенной муфте М5. Расчетные перемещения:
1 об. шпинделя → s мм продольного перемещения резца. Уравнение кинематической цепи следующее:
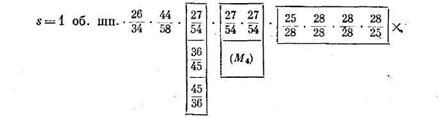

отсюда s1 = 0,1; s2 = 0,16; s3 = 0,25; s4 = 0,4; s5 = 0,64; s6 = 1 мм/об.
От коробки подач вращение может передаваться на ходовой вал, ходовой винт и сменные зубчатые колеса гитары дифферециала. Передача движения через зубчатые
колеса  ,
, или колёса
или колёса  ,
,  ,
, включается путем передвижения
включается путем передвижения
вдоль вала XXI зубчатого колеса z = 25 для реверсирования направления движения подачи суппорта.
Цепь продольной подачи от ходового вала используют при затыловании цилиндрических фрез с прямыми и винтовыми зубьями.
Продольное перемещение суппорта от ходового винта производится при затыловании зубьев червячных фрез или метчиков. В этом случае необходимо, чтобы за 1 об. шпинделя резец, участвующий в сложном движении формообразования винтовой поверхности на цилиндре, перемещался на величину осевого шага t винтовой линии червячной нарезки фрезы.
Расчетные перемещения конечных звеньев винторезной, цепи станка:
1 об. шпинделя → t мм продольного перемещения резца.
Уравнение кинематического баланса винторезной цепи при работе без перебора

откуда формула настройки винторезной гитары будет иметь вид

При работе с перебором ( пер= ¼) уравнение кинематического баланса той же цепи следующее:
пер= ¼) уравнение кинематического баланса той же цепи следующее:

|
Дата добавления: 2014-01-04; Просмотров: 689; Нарушение авторских прав?; Мы поможем в написании вашей работы!