КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обоснование и оценка качества задач, решаемых РЭС
|
|
|
|
Сложные РЭС широко используются при решении задач радиолокации, радионавигации, радиоуправления и т.д. В качестве примера рассмотрим определение перечня задач и качества, с которым должны выполняться эти задачи на основе анализа критерия эффективности РЭС ПВО управления зенитными орудиями. Элементами такой системы (рисунок 1.2) являются:
- радиолокационный комплекс (РЛК) обнаружения и целеуказания, предназначенный для заблаговременного обнаружения и оценки параметров движения воздушных объектов нападающей стороны;
- один (или несколько) РЛК управления стрельбой, предназначенный для уточнения параметров движения подлежащих обстрелу целей, выработки текущих значений углов наведения и установки дистанционного взрывателя снаряда с необходимой точностью;
- пусковые установки;
- средства передачи информации между элементами системы.
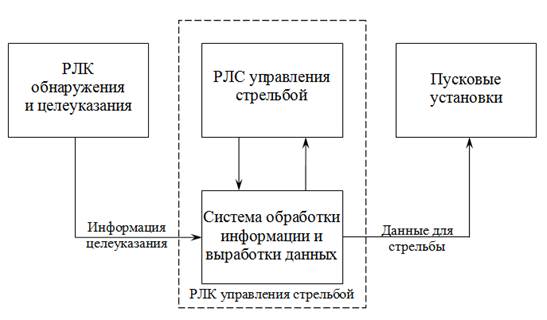
Рисунок 1.2.
Наиболее общим критерием эффективности рассматриваемой системы, сформированном на основе ее тактико-технического назначения, является так называемый, предотвращенный ущерб, определяемый из выражения [1].
 , (1.2)
, (1.2)
где  - важность обороняемого объекта, отн. ед;
- важность обороняемого объекта, отн. ед;
 - относительный ущерб, наносимый объекту j- м (j=1,N) средством нападения при отсутствии обороны;
- относительный ущерб, наносимый объекту j- м (j=1,N) средством нападения при отсутствии обороны;
 - вероятность поражения j -го средства нападения i -м средством обороны (зенитным снарядом);
- вероятность поражения j -го средства нападения i -м средством обороны (зенитным снарядом);
N - число средств нападения;
Lj - число снарядов, предназначенных для уничтожения j-го средства нападения, причем Lj= =Lo (Lo-ресурс снарядов).
=Lo (Lo-ресурс снарядов).
Чтобы обеспечить максимальное значение предотвращенного ущерба, основные усилия в соответствии с выражением (1.2) должны быть сосредоточены на повышение вероятности поражения цели:
|
|
|
 , (1.3)
, (1.3)
где  - вероятность правильного обнаружения j –й цели;
- вероятность правильного обнаружения j –й цели;
 - вероятность правильного сопровождения j -й цели;
- вероятность правильного сопровождения j -й цели;
 - вероятность поражения j -й цели.
- вероятность поражения j -й цели.
Вероятность поражения цели неуправляемым снарядом:
 , (1.4)
, (1.4)
где  - дисперсия ошибки промаха;
- дисперсия ошибки промаха;
 - эффективный радиус поражения – радиус сферы, в пределах которой снаряд поражает цель с заданной вероятностью.
- эффективный радиус поражения – радиус сферы, в пределах которой снаряд поражает цель с заданной вероятностью.
Из (1.4) следует, что вероятность поражения при прочих равных условиях есть величина, обратно пропорциональная дисперсии ошибки промаха, которая характеризуется следующими составляющими: ошибками определения координат цели при сопровождении, ошибками наведения пусковых установок, ошибками выдерживания снарядом заданной траектории полета. Поскольку дисперсии независимых процессов складываются, для дисперсии ошибки определения каждой из координат можем записать соотношение 
 .
.
От качества информации о цели, выдаваемой станцией управления, зависит только первая составляющая. При фиксированных значениях второй и третьей составляющей и заданных ограничениях на ошибку промаха можно определить требования к РЛК управления по точности сопровождения целей.
Необходимая дальность действия РЛС управления определяется выражением:
 , (1.5)
, (1.5)
где  - дальняя граница зоны поражения;
- дальняя граница зоны поражения;
 - относительная скорость сближения j -й цели и обороняемого объекта;
- относительная скорость сближения j -й цели и обороняемого объекта;
to - время полета снаряда на дальность r o;
tз – время захвата j -й цели на сопровождение;
tc – время сопровождения, необходимое для выработки требуемых установок стрельбы.
Вернемся к ошибкам сопровождения (целеуказания). Пусть зона целеуказания (по ТЗ должна быть задана) в сферической системе координат размерами  . Зона целеуказания, как правило, определяется ошибками РЛК обнаружения и целеуказания (
. Зона целеуказания, как правило, определяется ошибками РЛК обнаружения и целеуказания ( .Тогда вероятность захвата цели РЛК управления стрельбой по однократному целеуказанию на сопровождение определяется:
.Тогда вероятность захвата цели РЛК управления стрельбой по однократному целеуказанию на сопровождение определяется:
 , (1.6)
, (1.6)
где  - плотность распределения вероятности ошибки измерения координат цели. При отсутствии систематических ошибок целеуказания и нормальном распределении случайных ошибок с дисперсиями
- плотность распределения вероятности ошибки измерения координат цели. При отсутствии систематических ошибок целеуказания и нормальном распределении случайных ошибок с дисперсиями  получим:
получим:
|
|
|
 , (1.7)
, (1.7)
где  - интеграл вероятности.
- интеграл вероятности.
Из (1.7) следует, что если определена требуемая точность сопровождения, можно определить размеры зоны целеуказания (а также требуемую точность определения координат РЛК обнаружения и целеуказания).
Приведенные рассуждения относятся к режиму однократного целеуказания. Если же в РЛК осуществляется вторичная (межпериодная) обработка, использующая k (k>1) периодов облучения цели, то вероятность сопровождения будет:
 (1.8)
(1.8)
Повторные целеуказания приводят к увеличению времени захвата цели, что может привести к увеличению требуемой дальности действия РЛК.
Таким образом, исходя из рассмотренного критерия эффективности радиолокационной системы ПВО, определены задачи (обнаружение, сопровождение, выработка целеуказаний) и дана количественная оценка требуемым точностям определения координат цели, дальности действия и конфигурации зоны обзора.
Однако у рассмотренного выше критерия эффективности есть существенный недостаток, а именно: он сложно и неоднозначно связан с техническими параметрами проектируемых РЛК. Действительно, дальность действия, требуемая точность, размеры зоны обзора статистически зависят друг от друга. Чем больше требуемая дальность работы РЛК, тем ниже точность (т.к. уменьшается отношение сигнал/шум). Кроме того, дальность и точность статистически связаны с вероятностями обнаружения (сопровождения) и ложной тревоги и т.п. Между тем в соответствии с системным подходом необходимо использовать критерии, которые имеют явным физический смысл и непосредственно связаны с техническими параметрами проектируемой системы. Рассмотренный критерий не отвечает этим требованиям. Вообще надо отметить, что при проектировании сложных РЭС очень трудно выработать такой общий критерий и в общем виде эта задача до сих пор не решена. Поэтому очень важны опыт и интуиция разработчика. Единственным на сегодняшний день выходом является выбор некоторого промежуточного критерия, который связывал бы основные параметры РЭС, подлежащей проектированию. Для РЛК таким критерием является энергетическое отношение сигнал/помеха. Другими словами, выделяется один показатель качества, который принимается главным. Все остальные показатели переводятся в разряд ограничений.
|
|
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 394; Нарушение авторских прав?; Мы поможем в написании вашей работы!