КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие об управляемом движении ЛА; цели и задачи управления
|
|
|
|
Полет ЛА как управляемое движение
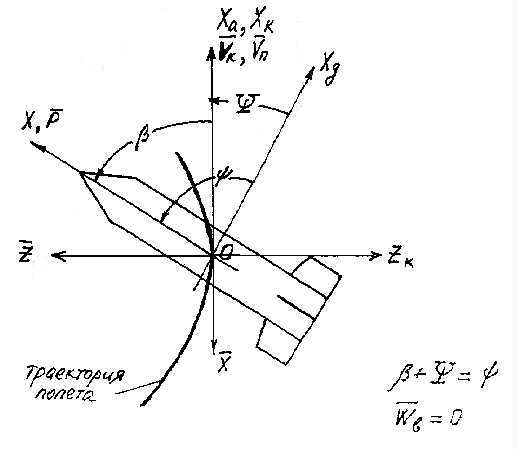
Рис. 2.16. Схема углов и сил, действующих на ракету сил при полете строго в горизонтальной плоскости
Рис. 2.15. Схема углов и сил, действующих на ракету сил при полете строго в вертикальной плоскости
Подчеркнем то обстоятельство, что движение изучаемого нами ЛА является управляемым. В связи с этим приведем несколько определений.
Управляемым аппаратом называется объект, движущийся в пространстве и обладающий возможностью изменять параметры своего движения (по величине и направлению) в целях выполнения поставленной задачи (т.е. целенаправленно).
Указанная возможность реализуется наличием у ЛА так называемых средств управления. Под средствами управления понимают совокупность устройств, осуществляющих воздействие на аппарат для целенаправленного изменения направления или величины параметров его движения.
Во многих задачах речь идет, прежде всего, о траекториях ЛА (например, в задачах баллистического проектирования). В этих случаях говорят об управляемой траектории ЛА. Пространственная траектория ЛА как твердого тела вполне определяется величиной и направлением вектора скорости его центра масс в каждый момент времени. Поэтому, чтобы траектория ЛА была управляемой, необходимо, чтобы была возможность целенаправленно изменять вектор скорости центра масс аппарата как по величине, так и по направлению. Это и означает возможность целенаправленно изменять траекторию движения аппарата.
Поскольку необходимость управления вызывается выполнением поставленной перед ЛА задачей, то в этом смысле эти траектории движения ЛА, их выбор и характер определяются этой задачей. С точки зрения возможных задач все управляемые траектории ЛА можно подразделить на две основных группы.
|
|
|
Первая группа траекторий определяется основным требованием, чтобы ЛА попал в определенную, заранее фиксированную, неподвижную точку или область пространства. При этом время движения может быть как заданным, так и нет. Фиксирование конечного местонахождения аппарата накладывает определенные связи на все его движение. Основное требование обычно дополняется ограничениямт, например, в виде:
– ТТХ к движению ЛА;
– условий пуска;
– оптимизирующих требований, выражающихся, например, в минимальном расходе топлива, в минимальном времени движения (быстродействии) и др.
Предъявляемые требования приводят к тому, что траектория движения в этой группе может быть выбрана и определена заранее, до пуска аппарата и поэтому может быть представлена как функция времени, т.е. в виде программы движения. Такие траектории называются программными траекториями, а задачи их определения называются задачами программирования.
Итак, в задачах первой группы ЛА должен двигаться по заранее выбранной программной траектории. Такой метод организации управляемого движения ЛА (или наведения ЛА на цель) называется методом движения (наведения) по программе. Основными задачами управления при организации движения по программе являются следующие:
– задача выбора, построения программной траектории (программы движения);
– задача реализации, осуществления выбранной программной траектории.
Вторая группа траекторий определяется требованием, чтобы ЛА встретился с целью, которая определенным образом (заранее неизвестным) движется в пространстве. В этом случае основным фактормо, формирующим траекторию движения ЛА, является закон движения цели. А поскольку движение цели заранее не определено, то и траекторию движения ЛА нельзя в этом случае заранее спрограммировать, т.е. определить положение центра масс ЛА как функцию времени. Мы можем лишь задать (выбрать) закон сближения ЛА с целью, именуемый законом или методом наведения. При этом положение аппарата в любой момент времени (т.е. траектория ЛА) полностью определяется законом движения цели и принятым методом наведения. Траектории аппарата в этом случае называются траекториями наведения.
|
|
|
Основными задачами управления при организации движения по траектории наведения являются следующие:
– задача определения закона или метода наведения;
– задача построения и анализа возможных траекторий наведения;
– задача реализации, осуществления выбранного метода (закона) наведения.
В некоторых современных комплексах один и тот же аппарат может последовательно совершать движение по различным траекториям. Например, для некоторых типов ЛА типичным является полет по программе на начальном участке и движение в режиме самонаведения на конечном участке.
Указанные различные группы траекторий характеризуются одним общим свойством – необходимостью организации искуссвенных воздействий на аппарат для целенаправленного изменения вектора скорости по величине и направлению в соответствии с программой движения или законом наведения. Такие, искусственно создаваемые воздействия будем в дальнейшем называть управляющими.
Но, вместе с тем, конкретные задачи управления носят различных характер. Так в траекториях первой группы обычно возникает необходимость выдержать, т.е. реализовать выбранную заранее программную траекторию. Эта необходимость возникает в связи с тем, что аппарат постоянно испытывает разнообразные воздействия, например, со стороны атмосферы, которые уводят аапарат с выбранной программной траектории. Такие воздействия классифицируются как возмущающие. Основная задача управления при этом заключается в том, чтобы в условиях непрерывно действующих возмущений вернуть ЛА на программную траекторию. Такая задача называется задачей стабилизации программной траектории и заключается она в парировании возмущающих воздействий путем организации соответствующих управляющих воздействий.
|
|
|
В траекториях второй группы основная задача управления заключается в том, чтобы быстро и точно переместить аппарат из одной точки пространства в другую в соответствии с движением цели и принятым методом наведения. Такая задача, называемая задачей управления, также решается путем организации и приложения к аппарату соответствующих управляющих воздействий.
Указанное выделение задач (или режимов) стабилизации и управления является условным. В дествительности, как в задачах программного движения, так и в задачах наведения, режимы стабилизации и управления существуют одновременно и непрерывно, ибо, во-первых, сама программа движения и характер ее изменения во времени требует приложения управляющих воздействий, а, во-вторых, любые траектории наведения также требуют реализации, т.е. выдерживания их в условиях возможных возмущающих воздействий.
Таким образом, основная общая задача управления ЛА заключается в организации управляющих воздействий для ведения ЛА по соответствующей траектории и парирования возмущающих воздействий.
Поскольку движение ЛА в пространстве определяется действующими на него силами и моментами, то создание управляющих воздействий на аппарат означает создание соответствующих сил и моментов, а именно - управляющих сил и управляющих моментов.
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 795; Нарушение авторских прав?; Мы поможем в написании вашей работы!