КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Преобразование сходящейся системы сил
|
|
|
|
Тождественное преобразование систем сил
Момент пары сил
Пара сил оказывает на тело вращающее действие. Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (рис.1.18)
 , (1.4)
, (1.4)
где:  -силы, составляющие пару;
-силы, составляющие пару;
h - плечо пары
 |
Рис.1.18.
Момент пары считают положительным, если силы стремятся вращать плечо  против хода часовой стрелки.
против хода часовой стрелки.
Свойства пары сил
1. Сумма проекций сил пары на любую ось равна нулю.
2. Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3. Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
Преобразование может быть выполнено графическим или аналитическим способом.
 Равнодействующая R двух сходящихся сил
Равнодействующая R двух сходящихся сил  находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника.
находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника.
Вывод: система сходящихся сил ( n) приводится к одной равнодействующей силе
n) приводится к одной равнодействующей силе  .
.
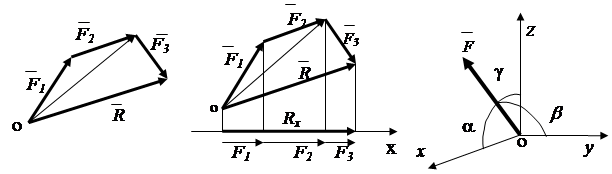
 Рис.1.19 Рис.1.20. Рис.1.21.
Рис.1.19 Рис.1.20. Рис.1.21.
Аналитически равнодействующая сила может быть определена через ее проекции на оси координат
 , (1.5)
, (1.5)
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось (рис.1.20). Rx = F1 x + F2 x + F3 x, или в общем виде
R x = å Fkx (1.6)
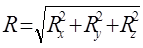
С учетом (1.6) равнодействующая определяется выражением
 , (1.7)
, (1.7)
Направление вектора равнодействующей определяется косинусами углов между вектором  и осями x, y, z (рис.1.20)
и осями x, y, z (рис.1.20)
|
|
|
 где
где 
1.7.2. Преобразование произвольной системы сил.
Применить правило параллелограмма сил непосредственно к произвольной системе сил нельзя, так как линии действия сил не пересекаются в одной точке. Предварительно систему сил приводят к одному центру на основании теоремы о параллельном переносе силы.
Теорема: силу, приложенную к твердому телу, можно, не изменяя оказываемого ею действия, перенести параллельно в другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, в которую она переносится (рис.1.22).
В результате указанного преобразования получается сходящаяся система сил и сумма моментов пар сил. Действие сходящейся системы сил заменяют действием суммарной силы, действие моментов - суммарным моментом. Суммарный вектор * называют главным вектором системы сил, суммарный момент  *
* - главным моментом системы сил.
- главным моментом системы сил.
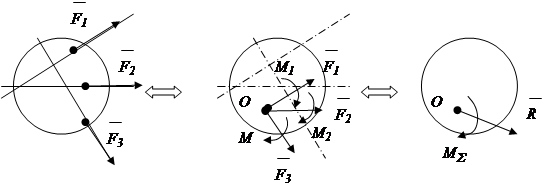
Рис.1.22
Вывод: произвольная система сил в результате тождественного преобразования приводится к главному вектору * и главному моменту *системы сил.
Аналитически главный вектор и главный момент системы сил могут быть определены через их проекции на оси координат
 , (1.8)
, (1.8)
 . (1.9)
. (1.9)
1.8 Условия равновесия систем сил
1.8.1. Равновесие системы сходящихся сил
По определению (см.п.1.1) действие системы сходящихся сил эквивалентно действию одной равнодействующей силы Из формулы (1.7) следует, что для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y,Z равнялась нулю å Fkx = 0 å Fky = 0 (1.10) å Fk z = 0 Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y равнялась нулю å Fky = 0 (1.11) . Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю
. Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю  = 0.
= 0.
 å Fkx = 0
å Fkx = 0
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 529; Нарушение авторских прав?; Мы поможем в написании вашей работы!