КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Превращения энергии при свободных механических колебаниях
|
|
|
|
Только в случае малых колебаний, когда приближенно можно заменить на математический маятник является гармоническим осциллятором, т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15–20°; при этом величина отличается от не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
Свободные колебания. Математический маятник
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести  уравновешивается силой натяжения нити
уравновешивается силой натяжения нити  При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести F τ = – mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести F τ = – mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
|
| Рисунок 2.3.1. Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = l φ – смещение маятника по дуге |
Если обозначить через x линейное смещение маятника от положения равновесия по дуге окружности радиуса l, то его угловое смещение будет равно φ = x / l. Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:
|
Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению x, а 
Для малых колебаний математического маятника второй закон Ньютона записывается в виде
|
|
|
|

Таким образом, тангенциальное ускорение a τ маятника пропорционально его смещению x, взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:
|
Эта формула выражает собственную частоту малых колебаний математического маятника.
Следовательно,
|
|
| Модель. Математический маятник |
Любое тело, насаженное на горизонтальную ось вращения, способно совершать в поле тяготения свободные колебания и, следовательно, также является маятником. Такой маятник принято называть физическим (рис. 2.3.2). Он отличается от математического только распределением масс. В положении устойчивого равновесия центр масс C физического маятника находится ниже оси вращения О на вертикали, проходящей через ось. При отклонении маятника на угол φ возникает момент силы тяжести, стремящийся возвратить маятник в положение равновесия:
| M = –(mg sin φ) d. |
Здесь d – расстояние между осью вращения и центром масс C.
|
| Рисунок 2.3.2. Физический маятник |
Знак «минус» в этой формуле, как обычно, означает, что момент сил стремится повернуть маятник в направлении, противоположном его отклонению из положения равновесия. Как и в случае математического маятника, возвращающий момент M пропорционален sin φ. Это означает, что только при малых углах φ, когда sin φ ≈ φ, физический маятник способен совершать свободные гармонические колебания. В случае малых колебаний
| M = – m g d φ. |
и второй закон Ньютона для физического маятника принимает вид (см. §1.23)
|
|
|
|
где ε – угловое ускорение маятника, I – момент инерции маятника относительно оси вращения O. Модуль коэффициента пропорциональности между ускорением и смещением равен квадрату круговой частоты:
|
Здесь ω0 – собственная частота малых колебаний физического маятника.
Следовательно,
|
Более строгий вывод формул для ω0 и T можно сделать, если принять во внимание математическую связь между угловым ускорением и угловым смещением: угловое ускорение ε есть вторая производная углового смещения φ по времени:

|
Поэтому уравнение, выражающее второй закон Ньютона для физического маятника, можно записать в виде
|

Это уравнение свободных гармонических колебаний (см. уравнение (*) §2.2). Коэффициент  в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
По теореме о параллельном переносе оси вращения (теорема Штейнера) момент инерции I можно выразить через момент инерции IC относительно оси, проходящей через центр масс C маятника и параллельной оси вращения:
| I = IC + md 2. |
Окончательно для круговой частоты ω0 свободных колебаний физического маятника получается выражение:
|
При свободных механических колебаниях кинетическая и потенциальная энергии изменяются периодически. При максимальном отклонении тела от положения равновесия его скорость, а следовательно, и кинетическая энергия обращаются в нуль. В этом положении потенциальная энергия колеблющегося тела достигает максимального значения. Для груза на горизонтально расположенной пружине потенциальная энергия – это энергия упругих деформаций пружины. Для математического маятника – это энергия в поле тяготения Земли.
Когда тело при своем движении проходит через положение равновесия, его скорость максимальна. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией. Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии. При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и т. д.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот.
|
|
|
|
| Модель. Превращения энергии при колебаниях |
Если в колебательной системе отсутствует трение, то полная механическая энергия при свободных колебаниях остается неизменной.
Для груза на пружине (см. §2.2):
|

|
Для малых колебаний математического маятника (см. §2.3):

|

|
Здесь h m – максимальная высота подъема маятника в поле тяготения Земли, x m и υm = ω0 x m – максимальные значения отклонения маятника от положения равновесия и его скорости.
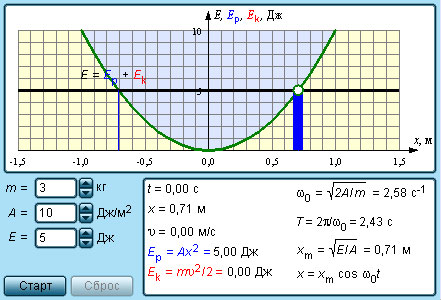
Превращения энергии при свободных механических колебаниях в отсутствие трения можно проиллюстрировать графически. Рассмотрим в качестве примера колебания груза массой m на пружине жесткости k. Пусть смещение x (t) груза из положения равновесия и его скорость υ (t)изменяются со временем по законам:
|
| υ (t) = –ω x m sin (ω0 t). |
Следовательно,

|

|
На рис. 2.4.1 изображены графики функций E p(t) и E k(t). Потенциальная и кинетическая энергии за период колебаний  два раза достигают максимальных значений. Сумма
два раза достигают максимальных значений. Сумма  остается неизменной.
остается неизменной.
|
| Рисунок 2.4.1. Превращения энергии при свободных колебаниях |
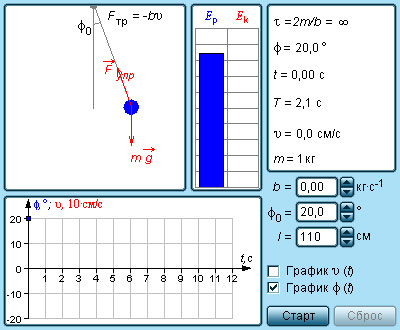
В реальных условиях любая колебательная система находится под воздействием сил трения (сопротивления). При этом часть механической энергии превращается во внутреннюю энергию теплового движения атомов и молекул, и колебания становятся затухающими (рис. 2.4.2).
|
| Рисунок 2.4.2. Затухающие колебания |
Скорость затухания колебаний зависит от величины сил трения. Интервал времени τ, в течении которого амплитуда колебаний уменьшается в e ≈ 2,7 раз, называется временем затухания.
Частота свободных колебаний зависит от скорости их затухания. При возрастании сил трения собственная частота уменьшается. Однако, изменение собственной частоты становится заметным лишь при достаточно больших силах трения, когда собственные колебания затухают быстро.
Важной характеристикой колебательной системы, совершающей свободные затухающие колебания, является добротность Q. Этот параметр определяется как число N полных колебаний, совершаемых системой за время затухания τ, умноженное на π:
|
|
|
|

Чем медленнее происходит затухание свободных колебаний, тем выше добротность Q колебательной системы. Добротность колебательной системы, определенная по затуханию колебаний на рис. 2.4.2, приблизительно равна 15.
Добротности механических колебательных систем могут быть очень высокими – порядка нескольких сотен и даже тысяч.
Понятие добротности имеет глубокий энергетический смысл. Можно определить добротность Q колебательной системы следующим энергетическим соотношением:
|

Таким образом, добротность характеризует относительную убыль энергии колебательной системы из-за наличия трения на интервале времени, равном одному периоду колебаний.
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 1084; Нарушение авторских прав?; Мы поможем в написании вашей работы!