КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движение по окружности. Задача кинематики бывает прямой и обратной
|
|
|
|
Обратная задача кинематики
Задача кинематики бывает прямой и обратной.
В прямой задаче задается закон движения г (t), из
которого требуется получить все кинематические
характеристики движения материальной точки:
Обратная задача гораздо сложнее прямой. Это
связано не только с тем, что при ее решении
необходимо овладеть навыками интегрирования
(интегрировать всегда сложней, чем вычислять
производную), но, в основном, с тем, что заданное
ускорение а зависит, как правило, не только от
времени t, но и от координат и скорости
движущейся частицы. В результате решение
подобной задачи сводится, как правило, к
решению дифференциальных уравнений. В
простейшем случае, когда заданное ускорение а
зависит лишь от времени, решение обратной
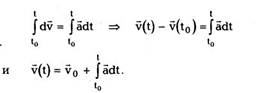
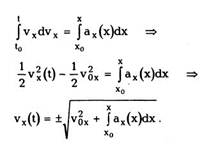
задачи выглядит следующим образом. Из (1.4)
dv = adt, следовательно,
|
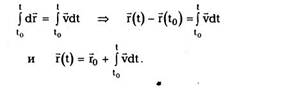
| Далее из (1.2а) следует, что dr = vdt, поэтому |
|
Результат интегрирования правой части
зависит от конкретного вида зависимости а от t.
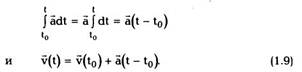
В частности, при равноускоренном движении,
когда а = const
Путь, пройденный за время t, находится с
помощью формулы (1.3), записанной в виде
Так как s(t0) = 0, следовательно,

|

|

|

|

|

|
|

|
|

|
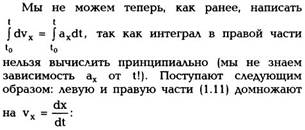
где под интегралом (не следует забывать!)
а затем интегрируют
|

|
|

|
Интеграл
в принципе вычисляется.

|
|
Рассмотрим теперь дополнительные
кинематические характеристики частицы,
удобные при изучении движения последней по
окружности.
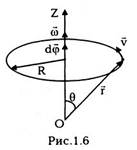
Пусть за время dt частица, двигаясь по
окружности радиусом R, повернулась на
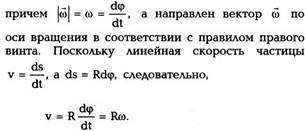
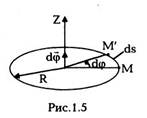
бесконечно малый угол d<p, пройдя путь ds = Rd(p
|
|
|
(рис. 1.5). Вводим вектор бесконечно малого
поворота dcp, модуль которого |dcp| = d(p, a
направление совпадает с осью поворота OZ
(причем так, что направление поворота отвечает
правилу правого винта по отношению к
направлению dcp). Отношение dcp к dt
называется вектором угловой скорости частицы
вектором скорости частицы v (направленным по
касательной к окружности) и вектором угловой
скорости со (направленным по оси вращения)
дается выражением

где квадратные скобки обозначают векторное
произведение со на г.
Вектором углового ускорения 8 называется
величина


|
|

|
| тангенциальное ускорение |

|
| и полное ускорение |

|
где dco — изменение вектора со за бесконечно
малый промежуток времени dt. Если в процессе
движения частицы ось вращения OZ остается
фиксированной в пространстве, то
 8
8
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 268; Нарушение авторских прав?; Мы поможем в написании вашей работы!