КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Представление Денавита – Хартенберга
Для описания вращательных и поступательных связей между соседними звеньями Денавит и Хартенберг предложили матричный метод последовательного построения систем координат, связанных с каждым звеном кинематической цепи. Смысл представления Денавита–Хартенберга (ДХ-представление) состоит в формировании однородной матрицы преобразования, имеющей размерность 4×4 и описывающей положение системы координат каждого звена относительно системы координат предыдущего звена. Это дает возможность последовательно преобразовать координаты схвата манипулятора из системы отсчета, связанной с последним звеном, в базовую систему отсчета, являющейся инерциальной системой координат для рассматриваемой динамической системы.
Каждая система координат формируется на основе следующих трех правил:
1) ось zi-1 направлена вдоль оси i –го сочленения;
2) ось xi перпендикулярна оси zi-1 и направлена от нее;
3) ось yi дополняет оси xi, zi до правой декартовой системы координат.
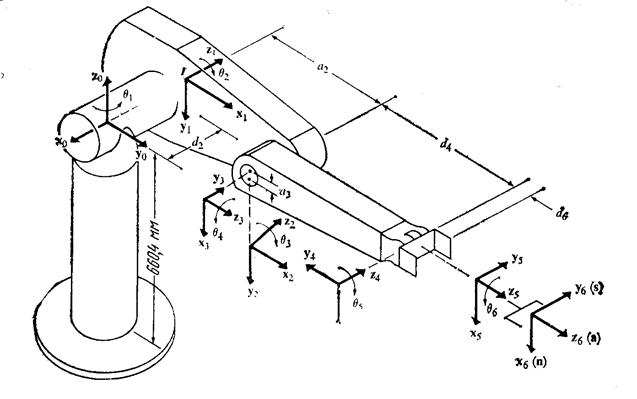
ДХ–представление твердых звеньев зависит от четырех геометрических параметров, соответствующих каждому звену. Эти четыре параметра полностью описывают любое вращательное или поступательное движение и определяются в соответствии с рис. 5.4 следующим образом:
Qi – присоединенный угол, на который надо повернуть ось xi-1 вокруг оси zi-1, чтобы она стала сонаправлена с осью xi (знак определяется в соответствии с правилом правой руки);
di - расстояние между пересечением оси zi-1 с осью xi и началом (i -1)-й системы координат, отсчитываемое вдоль оси zi-1;
ai - линейное смещение – расстояние между пересечением оси zi-1 с осью xi и началом i -й системы координат, отсчитываемое вдоль оси xi, т. е. кратчайшее расстояние между осями zi-1 и zi;
αi - угловое смещение - угол, на который надо повернуть ось zi-1 вокруг оси xi, чтобы она стала сонаправленной с осью zi (знак определяется в соответствии с правилом правой руки).
Для вращательных сочленений параметры di, ai и αi являются характеристикамисочленения, постоянными для данного типа робота. В то же время Qi является переменной величиной, изменяющейся при движении (вращении) i -го звена относительно (i-1)-го.
Для каждого звена манипулятора с n степенями свободы этот алгоритм формирует ортонормированную систему координат. Системы координат нумеруются в порядке возрастания от основания к схвату манипулятора. Взаимное расположение соседних звеньев описывается однородной матрицей преобразования размерностью 4х4.
| Параметры систем координат звеньев манипулятора Пума | |||||
| Сочленение i | 
| 
| 
| 
| Пределы измерения |
| -90 | -160-+160 | ||||
| 431,8 мм | 149,09 мм | -225-45 | |||
| -20,32 мм | -45-225 | ||||
| -90 | 433,07 мм | -110-170 | |||
| -100-100 | |||||
| 56,25 мм | -266-266 |
|
Дата добавления: 2013-12-12; Просмотров: 5005; Нарушение авторских прав?; Мы поможем в написании вашей работы!