КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Скорость произвольной точки звена манипулятора
Для того, чтобы воспользоваться уравнениями Лагранжа-Эйлера, необходимо знать кинетическую энергию рассматриваемой физической системы, а следовательно, и скорости всех её точек.
Рассмотрим произвольную точку, неподвижную относительно i -го звена и заданную в системе координат i -го звена однородными координатами  (рис. 5.1):
(рис. 5.1):
 . (5-1)
. (5-1)
Обозначим через  координаты этой же точки относительно базовой системы координат. Матрица
координаты этой же точки относительно базовой системы координат. Матрица  обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i -го звена относительно системы координат (i -1)-го звена, а
обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i -го звена относительно системы координат (i -1)-го звена, а  -матрицу, определяющую связь между системой координат i -го звена и базовой системой координат.
-матрицу, определяющую связь между системой координат i -го звена и базовой системой координат.
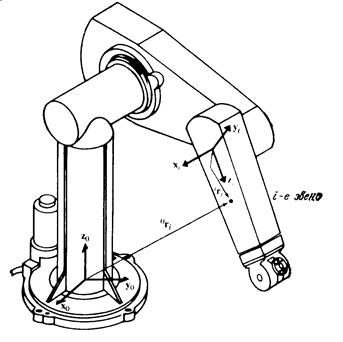
Рисунок 5.1. Точка i -го звена
Тогда связь между  и
и  определяется соотношением:
определяется соотношением:
 , (5-11)
, (5-11)
где  . (5-12)
. (5-12)
Если i -е сочленение – вращательное, то матрица  имеет вид:
имеет вид:
 , (5-13)
, (5-13)
Если i -ое сочленение – поступательное, то матрица имеет вид:
 . (5-14)
. (5-14)
В общем все ненулевые элементы матрицы являются функциями величин  и
и  , причём в зависимости от типа j -го сочленения
, причём в зависимости от типа j -го сочленения  или
или  представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты
представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты  ,
,  , если i -е сочленение – вращательное и
, если i -е сочленение – вращательное и  , если i- е сочленение – поступательное).
, если i- е сочленение – поступательное).
Скорость точки  относительно базовой системы координат (при
относительно базовой системы координат (при  ):
):
 . (5-15)
. (5-15)
Частные произведение матрицы  по переменным
по переменным  легко вычисляется с помощью матрицы
легко вычисляется с помощью матрицы  , которая для вращательного сочленения имеет вид:
, которая для вращательного сочленения имеет вид:
 , (5-16а)
, (5-16а)
а для поступательного сочленения:
 . (5-16б)
. (5-16б)
Используя эту матрицу, можно написать:
 . (5-17)
. (5-17)
Например, для манипулятора с вращательными сочленениями  . Используя равенство (9-13), имеем:
. Используя равенство (9-13), имеем:
Таким образом, для 
 (5-18)
(5-18)
По смыслу равенство (9-18) описывает изменение положения точек i -го звена, вызванное движением в j -м сочленении манипулятора. Для упрощения формул введём обозначение  , с учетом которого равенство (9-18) можно представить для
, с учетом которого равенство (9-18) можно представить для  :
:
 (5-19)
(5-19)
Используя введённое обозначение, формулу для  можно записать в форме:
можно записать в форме:
 . (5-20)
. (5-20)
Определяем величину, характеризующую эффект взаимодействия сочленений:
 (5-21)
(5-21)
Например, для манипулятора вращательными сочленениями при  и
и  имеем:
имеем:
 .
.
|
Дата добавления: 2013-12-12; Просмотров: 432; Нарушение авторских прав?; Мы поможем в написании вашей работы!