КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теорема Чеви
|
|
|
|
План.
План.
План.
План.
План.
План.
План.
План.
План.
План.
1. Загальне рівняння поверхні другого порядку. Сфера та її рівняння.
2. Дослідження поверхні другого порядку за допомогою плоских перерізів.
3. Еліпсоїд. Властивості. Зображення.
4. Однопорожнинний гіперболоїд. Властивості. Зображення.
5. Двопорожнинний гіперболоїд. Властивості. Зображення.
6. Еліптичний параболоїд. Властивості. Зображення.
7. Гіперболічний параболоїд. Властивості. Зображення.
Лекція 17. Циліндричні та конічні поверхні. Поверхні обертання. Прямолінійні твірні поверхонь другого порядку.
1. Поняття циліндричної поверхні. Рівняння циліндричних поверхонь. Приклади.
2. Поняття конічної поверхні. Рівняння конічних поверхонь.
3. Поверхні обертання.
4. Прямолінійні твірні поверхонь другого порядку.
5. Приклади розв’язання задач.
Лекція 18. Загальне рівняння лінії другого порядку.
1. Поняття загального рівняння лінії другого порядку.
2. Перетин лінії з прямою. Частинні випадки.
3. Центр лінії.
4. Рівняння дотичної та нормалі.
Лекції 19 – 20. Деякі властивості ліній другого порядку та їх застосування до зображення ліній.
1. Теорема про середини паралельних хорд лінії другого порядку.
2. Спряжені напрямки та спряжені діаметри.
3. Спряжені напрямки нецентральних ліній.
4. Головні напрямки та головні діаметри. Рівняння осей симетрії.
5. Рівняння асимптот лінії другого порядку.
6. Орієнтовна схема вивчення властивостей лінії другого порядку.
7. Приклади побудови ліній за їхніми рівняннями.
Лекція 21.Спрощення рівняння лінії другого порядку за допомогою геометричних перетворень.
|
|
|
1. Спрощення рівняння лінії за допомогою паралельного перенесення системи координат.
2. Спрощення рівняння лінії за допомогою повороту системи координат.
3. Застосування геометричних перетворень для побудови ліній другого порядку.
Лекція 22. Інваріанти рівняння кривої другого порядку. Застосування інваріантів для побудови ліній та їх класифікації.
1. Інваріанти рівняння лінії.
2. Характеристичне рівняння.
3. Класифікація ліній другого порядку.
4. Застосування інваріантів для побудови ліній другого порядку.
Лекція 23. Загальне рівняння поверхні другого порядку.
1. Поняття загального рівняння поверхні другого порядку.
2. Перетин поверхні з прямою. Частинні випадки.
3. Центр поверхні.
4. Рівняння дотичної площини та нормалі.
Лекція 1
Вектори. Лінійні операції над векторами.
1. Поняття вектора. Основні означення. Колінеарні та компланарні вектори.
2. Додавання та віднімання векторів. Властивості даних операцій.
3. Множення вектора на скаляр. Властивості.
4. Приклади розв’язання задач.
1. Із курсу елементарної фізики відомо, що деякі фізичні величини, зокрема такі, як довжина, площа, об’єм, температура, маса, густина, відстань виражаються одним числом, яке характеризує відношення цієї величини до відповідної одиниці вимірювання. Такі величини називають скалярними. Для характеристики ряду інших величин (сили, переміщення, швидкості, прискорення і ін.) одного числа недостатньо. Крім кількісної оцінки вони характеризуються також направленістю в просторі. Такі величини називають векторними. Абстрагуючись від конкретних фізичних величин, введемо математичне поняття геометричного вектора або просто вектора.
Означення 1.Вектором називається напрямлений відрізок.
Вектор визначається впорядкованою парою точок. Перша з них називається початком, друга – кінцем вектора. Якщо початком вектора є точка  , а кінцем точка
, а кінцем точка  , то його позначають символом
, то його позначають символом  . Іноді використовують позначення у вигляді малої букви латинського алфавіту (наприклад,
. Іноді використовують позначення у вигляді малої букви латинського алфавіту (наприклад,  ). На рисунку вектор зображають відрізком із стрілкою в кінці вектора.
). На рисунку вектор зображають відрізком із стрілкою в кінці вектора.
|
|
|
Вектор, початок та кінець якого співпадають, називається нульовим і позначається грецькою буквою  (тета).
(тета).
Основними характеристиками вектора є його довжина та напрям.
Довжиною (модулем) вектора називають довжину відрізка, яким він зображається. Позначають довжину вектора символом  Наприклад,
Наприклад,  . Якщо довжина вектора рівна одиниці, то його називають одиничним або ортом. Очевидно, що
. Якщо довжина вектора рівна одиниці, то його називають одиничним або ортом. Очевидно, що  .
.
Під напрямом вектора  розуміють напрям променя
розуміють напрям променя  . Нульовому вектору присвоюють довільний напрям.
. Нульовому вектору присвоюють довільний напрям.
Означення 2. Два вектори називають колінеарними, якщо вони паралельні деякій прямій.
Означення 3. Три вектори називають компланарними, якщо вони паралельні деякій площині.
Означення 4. Два колінеарних вектори називають однаково (протилежно) напрямленими, якщо вони лежать в одній півплощині (в різних півплощинах) відносно прямої, яка сполучає їхні початки. Якщо два вектори та  лежать на одній прямій, то їх називають однаково напрямленими, якщо всі точки одного із променів
лежать на одній прямій, то їх називають однаково напрямленими, якщо всі точки одного із променів  або
або  належать іншому. Якщо жоден із променів та цілком не належить іншому, то вектори та називають протилежно напрямленими.
належать іншому. Якщо жоден із променів та цілком не належить іншому, то вектори та називають протилежно напрямленими.
Однаково напрямлені вектори  та
та  позначають символом
позначають символом  . Протилежно напрямлені вектори та позначають
. Протилежно напрямлені вектори та позначають  .
.
Два вектори, які мають однакові довжини та протилежні напрямки, називають протилежними. Протилежним до вектора є вектор  . Вектор, протилежний до , позначають символом
. Вектор, протилежний до , позначають символом  . Доцільність саме такого позначення стане зрозумілою після введення у пункті 3 означення добутку вектора на число.
. Доцільність саме такого позначення стане зрозумілою після введення у пункті 3 означення добутку вектора на число.
Означення 5. Два вектори називають рівними, якщо вони однаково напрямлені та мають рівні довжини.
Умову рівності векторів та записують так:  . Від будь-якої точки площини чи простору можна відкласти вектор, рівний даному і причому тільки один. На рисунку 1 зображено ромб
. Від будь-якої точки площини чи простору можна відкласти вектор, рівний даному і причому тільки один. На рисунку 1 зображено ромб  , на якому показані рівні вектори
, на якому показані рівні вектори  =
= та протилежні вектори
та протилежні вектори  і
і  . Вектори і , незважаючи на рівність довжин відрізків
. Вектори і , незважаючи на рівність довжин відрізків  та
та  , не рівні, оскільки вони мають різні напрямки.
, не рівні, оскільки вони мають різні напрямки.
2. Введемо означення лінійних операцій над векторами. Під лінійними операціями над векторами розуміють дії додавання векторів, а також множення їх на числа.
|
|
|
Означення 6. Сумою векторів та називають вектор, проведений з початку вектора до кінця вектора при умові, що кінець вектора співпадає з початком вектора (рис.2).
Суму векторів та позначають символом  . Для довільних трьох точок
. Для довільних трьох точок  та
та  , згідно із означенням суми векторів, виконується рівність
, згідно із означенням суми векторів, виконується рівність  .
.
Означений таким чином спосіб додавання векторів називають “правилом трикутника”.
Якщо вектори та відкласти із спільного початку та на одержаних відрізках, як на сторонах, побудувати паралелограм, то вектор, який співпадає з діагоналлю та має початок у спільному початку даних векторів, буде їхньою сумою (рис.3). Такий спосіб знаходження суми векторів називається “правилом паралелограма” Очевидно, що додавання векторів за “правилом трикутника” та “правилом паралелограма” дають у результаті один і той же вектор.

Рис. 1 Рис. 2 Рис. 3
Послідовне додавання векторів 
 …, та
…, та  у результаті дає вектор
у результаті дає вектор 


 . В математиці такі суми записують за допомогою великої грецької букви
. В математиці такі суми записують за допомогою великої грецької букви  (сигма). Зокрема, попередню рівність можна записати у виді
(сигма). Зокрема, попередню рівність можна записати у виді
 .
.
Якщо  , то це означає, що точки
, то це означає, що точки  та
та  співпадають, тобто многокутник
співпадають, тобто многокутник  замкнутий.
замкнутий.
Очевидно, що для довільного трикутника  виконується рівність . Навпаки, якщо дано три вектори
виконується рівність . Навпаки, якщо дано три вектори  та
та  , серед яких є хоча б два неколінеарних, то із них можна утворити трикутник, якщо виконується рівність
, серед яких є хоча б два неколінеарних, то із них можна утворити трикутник, якщо виконується рівність  , або коли один із векторів є сумою двох інших.
, або коли один із векторів є сумою двох інших.
Зупинимося на деяких властивостях операції додавання векторів. Зокрема,
1)  (комутативність додавання або переставна властивість);
(комутативність додавання або переставна властивість);
2)  (асоціативність додавання або сполучна властивість);
(асоціативність додавання або сполучна властивість);
3)  ;
;
4)  .
.
Доведення властивості 1) випливає із рисунка 3.
Для доведення властивості 2) покладемо  . Тоді
. Тоді
 ,
,  ,
,  ,
,  ,
,
тобто 

 .
.
Доведення властивостей 3) та 4) очевидне.
Означення 7. Різницею векторів та називають вектор  , який є розв’язком рівняння
, який є розв’язком рівняння  .
.
Такий розв’язок існує і єдиний. Справді, розглянемо вектор  . Підставляючи його в рівняння та використовуючи властивості 2), 4) і 3), переконуємось, що він є розв’язком рівняння.
. Підставляючи його в рівняння та використовуючи властивості 2), 4) і 3), переконуємось, що він є розв’язком рівняння.
|
|
|
Різницю векторів та записують у виді  . Отже, запис
. Отже, запис  , згідно з означенням різниці векторів, означає, що
, згідно з означенням різниці векторів, означає, що  . Звідси випливає спосіб побудови вектора , який є різницею векторів та , а саме: вектори та відкладають із спільного початку, а потім, сполучивши кінці векторів , та вибравши напрям шуканого вектора від кінця до кінця вектора
. Звідси випливає спосіб побудови вектора , який є різницею векторів та , а саме: вектори та відкладають із спільного початку, а потім, сполучивши кінці векторів , та вибравши напрям шуканого вектора від кінця до кінця вектора  , одержують вектор
, одержують вектор  (рис. 4). Очевидно, що різницю векторів та можна одержати, додаючи вектори та
(рис. 4). Очевидно, що різницю векторів та можна одержати, додаючи вектори та  (рис. 5), тобто для різниці векторів виконується рівність
(рис. 5), тобто для різниці векторів виконується рівність  .
.
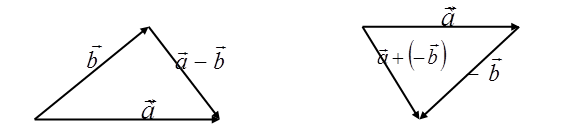
Рис. 4 Рис. 5
3. Нехай заданий деякий вектор та дійсне число  .
.
Означення 8. Добутком вектора на число називають вектор , який задовольняє наступні умови:
1) довжина цього вектора  ,
,
2)  , якщо
, якщо  та
та  , якщо
, якщо  .
.
При  згідно з пунктом 1) означення
згідно з пунктом 1) означення  , тому результатом множення довільного вектора на 0 є нульовий вектор
, тому результатом множення довільного вектора на 0 є нульовий вектор  . Добуток вектора на число записують у виді
. Добуток вектора на число записують у виді  .
.
Множення вектора на число має ряд властивостей, зокрема такі:
1)  ;
;
2)  ;
;
3)  ;
;
4)  ;
;
5)  (асоціативність множення відносно числових множників та
(асоціативність множення відносно числових множників та  );
);
6)  (дистрибутивність множення відносно числового множника);
(дистрибутивність множення відносно числового множника);
7)  (дистрибутивність множення відносно векторного множника).
(дистрибутивність множення відносно векторного множника).
Доведення властивостей 1) – 4) очевидне. Для доведення властивості 5) потрібно розглянути наступні випадки: а)  ; б)
; б)  ; в)
; в)  ; г)
; г)  ; д) одне з чисел l i t або обидва ці числа дорівнюють нулю. У випадку а), оскільки
; д) одне з чисел l i t або обидва ці числа дорівнюють нулю. У випадку а), оскільки  , то
, то  . Враховуючи те, що , дістаємо, що
. Враховуючи те, що , дістаємо, що  . Отже,
. Отже,  . Очевидно, що
. Очевидно, що  , тобто вектори
, тобто вектори  та
та  співнапрямлені. Рівність їхніх довжин випливає із рівності
співнапрямлені. Рівність їхніх довжин випливає із рівності  . Згідно з означенням рівності векторів властивість 5) у випадку а) доведена. Випадки б), в) та г) розглядаються аналогічно. У випадку д) рівність 5) виконується, оскільки обидві частини рівності є нульовими векторами. Властивість 6) випливає з подібності трикутників та
. Згідно з означенням рівності векторів властивість 5) у випадку а) доведена. Випадки б), в) та г) розглядаються аналогічно. У випадку д) рівність 5) виконується, оскільки обидві частини рівності є нульовими векторами. Властивість 6) випливає з подібності трикутників та  (див. рис. 6 при та рис. 7 при ). Доведення властивості 6) при очевидне.
(див. рис. 6 при та рис. 7 при ). Доведення властивості 6) при очевидне.


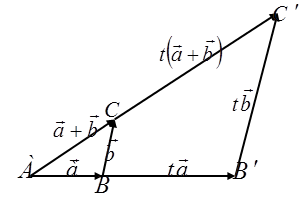
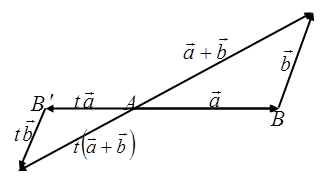
Рис. 6 Рис. 7
Для доведення властивості 7) потрібно розглянути випадки, коли числа та l одного знаку (обидва додатні або від’ємні) або різних знаків. Нехай  та
та  . Тоді
. Тоді 
 і
і  . Вектори
. Вектори  та
та  протилежно напрямлені, а також
протилежно напрямлені, а також  . Тому
. Тому  Вектор
Вектор  має напрям вектора , тобто співнапрямлений з вектором . Отже, в обох частинах рівності 7) маємо співнапрямлені вектори однакової довжини, тобто ці вектори рівні.
має напрям вектора , тобто співнапрямлений з вектором . Отже, в обох частинах рівності 7) маємо співнапрямлені вектори однакової довжини, тобто ці вектори рівні.
Аналогічно розглядається випадок  та випадок, коли
та випадок, коли  . Якщо одне із чисел t або l рівне нулю, або вони обидва дорівнюють нулю, то рівність 7) очевидна.
. Якщо одне із чисел t або l рівне нулю, або вони обидва дорівнюють нулю, то рівність 7) очевидна.
Зауважимо, що якщо  , то вектор
, то вектор  одиничний і має напрям вектора . Справді,
одиничний і має напрям вектора . Справді,
 .
.
4. Наведемо приклади розв’язання задач.
Задача 1. Довести, що точка  є центром ваги трикутника (точкою перетину медіан) тоді і тільки тоді, коли виконується рівність
є центром ваги трикутника (точкою перетину медіан) тоді і тільки тоді, коли виконується рівність  .
.

 Доведення. Нехай точка є точкою перетину медіан
Доведення. Нехай точка є точкою перетину медіан  та
та  (рис. 8).
(рис. 8).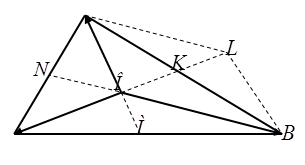 Тоді
Тоді 
 , де
, де  – діагональ паралелограма
– діагональ паралелограма  . Оскільки точка
. Оскільки точка  – середина відрізків та , то
– середина відрізків та , то  . За відомою властивістю медіан трикутника
. За відомою властивістю медіан трикутника  , тому
, тому  . Отже,
. Отже,

 .
.
Навпаки, нехай виконується рівність , тобто  . Тоді
. Тоді  , де – середина відрізка . З рівності
, де – середина відрізка . З рівності  випливає, що точки
випливає, що точки  та лежать на одній прямій, а також, що – медіана трикутника. Оскільки
та лежать на одній прямій, а також, що – медіана трикутника. Оскільки  , то точка є точкою перетину медіан.
, то точка є точкою перетину медіан.
Задача 2. У п’ятикутнику ABCDE точки K,L,M,N – середини відповідно сторін AB, BC, CD та DE, а точки R і S – середини відрізків KM та LN. Довести, що  та
та  (рис. 9).
(рис. 9).
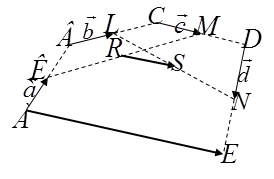 Доведення. Введемо позначення:
Доведення. Введемо позначення:  . Тоді
. Тоді 
 . Знайдемо вектор
. Знайдемо вектор  .
. 


 . Оскільки
. Оскільки  та
та 
 , то
, то


 . Із одержаної рівності випливає, що та .
. Із одержаної рівності випливає, що та .
Задача 3. В опуклому чотирикутнику  точки та
точки та  – відповідно середини сторін і . Довести, що якщо
– відповідно середини сторін і . Довести, що якщо  , то
, то  .
.
Доведення. Очевидно, що  та
та  . Додавши одержані рівності, дістаємо
. Додавши одержані рівності, дістаємо  , звідки
, звідки  . Але за умовою
. Але за умовою  . Рівність
. Рівність  можлива тільки тоді, коли вектори
можлива тільки тоді, коли вектори  та
та  співнапрямлені, тобто, коли відрізки
співнапрямлені, тобто, коли відрізки  та
та  паралельні. Отже, .
паралельні. Отже, .
Лекція 2
Лінійна залежність та незалежність векторів.
1.Поняття лінійної залежності та незалежності векторів. Основні теореми.
2. Базис системи векторів.
3. Координати вектора. Дії над векторами в координатній формі.
4. Ортонормовані базиси. Довжина вектора.
5. Приклади розв’язання задач.
1. Нехай задані вектори  та числа
та числа  .
.
Означення 1. Вектор  називається лінійною комбінацією векторів
називається лінійною комбінацією векторів  .
.
У цьому випадку говорять також, що вектор лінійно виражається через вектори .
Означення 2. Якщо рівність
 (1) можлива при деяких ненульових коефіцієнтах, то вектори називають лінійно залежними. Якщо ж дана рівність виконується тільки при нульових коефіцієнтах, то вектори називають лінійно незалежними.
(1) можлива при деяких ненульових коефіцієнтах, то вектори називають лінійно залежними. Якщо ж дана рівність виконується тільки при нульових коефіцієнтах, то вектори називають лінійно незалежними.
Розглянемо деякі твердження, які дають можливість давати відповідь на питання про лінійну залежність чи незалежність векторів без використання означення.
Теорема 1. Вектори лінійно залежні тоді і тільки тоді, коли один із них є лінійною комбінацією інших.
Доведення. Нехай вектори лінійно залежні. Тоді в рівності  можна підібрати коефіцієнти так, щоб хоч один із них був відмінний від нуля. Нехай
можна підібрати коефіцієнти так, щоб хоч один із них був відмінний від нуля. Нехай  . Тоді
. Тоді  , тобто вектор
, тобто вектор  є лінійною комбінацією векторів
є лінійною комбінацією векторів  . Навпаки, якщо один із векторів є лінійною комбінацією інших, наприклад,
. Навпаки, якщо один із векторів є лінійною комбінацією інших, наприклад,  , то в рівності
, то в рівності  коефіцієнт біля відмінний від нуля, тому, згідно з означенням, вектори лінійно залежні.
коефіцієнт біля відмінний від нуля, тому, згідно з означенням, вектори лінійно залежні.
Користуючись даною теоремою, можна стверджувати, наприклад, що вектори  , для яких виконується рівність
, для яких виконується рівність  , лінійно залежні. В той же час, якщо два вектори
, лінійно залежні. В той же час, якщо два вектори  не колінеарні, то вектор
не колінеарні, то вектор  напрямлений по діагоналі паралелограма, побудованого на векторах
напрямлений по діагоналі паралелограма, побудованого на векторах  та
та  , буде рівний нулю тільки тоді, коли
, буде рівний нулю тільки тоді, коли  . У цьому випадку вектори та лінійно незалежні.
. У цьому випадку вектори та лінійно незалежні.
Теорема 2. Якщо серед векторів є нульовий вектор, то ці вектори лінійно залежні.
Доведення випливає зрівності (1), в якій достатньо поставити біля нульового вектора відмінний від нуля коефіцієнт, а всі інші коефіцієнти взяти рівними нулю.
Теорема 3. Якщо деяка система векторів містить лінійно залежну підсистему, то ці вектори лінійно залежні.
Для доведення достатньо для підсистеми лінійно залежних векторів виписати рівність (1) з деякими ненульовими коефіцієнтами та доповнити її доданками, одержаними із решти векторів та взятими з нульовими коефіцієнтами.
Теорема 4. Два вектори лінійно залежні тоді і тільки тоді, коли вони колінеарні.
Доведення. Нехай вектори та лінійно залежні та  . Оскільки при
. Оскільки при  , а при
, а при  , то та колінеарні.
, то та колінеарні.
Навпаки, нехай дані вектори колінеарні. Розглянемо вектор  , де знак «+» вибираємо, якщо і знак «-» - якщо . Очевидно, що
, де знак «+» вибираємо, якщо і знак «-» - якщо . Очевидно, що  . Крім цього, при дістаємо
. Крім цього, при дістаємо  , тобто
, тобто  , а якщо , то
, а якщо , то  , отже, . В обох випадках вектори та співнапрямлені і, оскільки їхні довжини рівні, то
, отже, . В обох випадках вектори та співнапрямлені і, оскільки їхні довжини рівні, то  . Отже,
. Отже,  , або
, або  , де
, де  . Таким чином, згідно із теоремою 1, вектори та лінійно залежні. Теорема доведена.
. Таким чином, згідно із теоремою 1, вектори та лінійно залежні. Теорема доведена.
Теорема 5. Три вектори лінійно залежні тоді і тільки тоді, коли вони компланарні.
Доведення. Нехай вектори лінійно залежні. Виразимо один із них через інші. Нехай . Позначимо 
 . Точки
. Точки  лежать в одній площині. Цій площині належить також точка , для якої
лежать в одній площині. Цій площині належить також точка , для якої  . Отже, вектори компланарні.
. Отже, вектори компланарні.
Навпаки, нехай вектори компланарні. Вважатимемо, що серед них немає нульових та колінеарних векторів, оскільки в цьому тривіальному випадку вони будуть лінійно залежними (теореми 2 та 3). Від довільної точки відкладемо вектори  та проведемо через точку пряму, паралельну до
та проведемо через точку пряму, паралельну до  (рис. 1). Нехай дана пряма перетинає пряму
(рис. 1). Нехай дана пряма перетинає пряму  в точці
в точці  . Тоді
. Тоді  . Вектори
. Вектори  та колінеарні, тому
та колінеарні, тому  . Аналогічно,
. Аналогічно,  , тому . Згідно з теоремою 1 вектори будуть лінійно залежними. Теорема доведена.
, тому . Згідно з теоремою 1 вектори будуть лінійно залежними. Теорема доведена.
Теорема 6. Будь-які чотири геометричні вектори лінійно залежні.
 Доведення. Розглянемо чотири вектори
Доведення. Розглянемо чотири вектори  . Нехай вектори не компланарні. У випадку компланарності ці три вектори будуть лінійно залежними (теорема 5), тому і всі чотири вектори будуть лінійно залежними (теорема 3). Відкладемо дані вектори від спільної точки . Нехай
. Нехай вектори не компланарні. У випадку компланарності ці три вектори будуть лінійно залежними (теорема 5), тому і всі чотири вектори будуть лінійно залежними (теорема 3). Відкладемо дані вектори від спільної точки . Нехай  . Проведемо через точку пряму, паралельну прямій
. Проведемо через точку пряму, паралельну прямій  та нехай дана пряма перетне площину
та нехай дана пряма перетне площину  в деякій точці.(рис. 2). Тоді
в деякій точці.(рис. 2). Тоді  . Існують числа
. Існують числа 
 та
та  такі, що
такі, що  (теорема 5),
(теорема 5),  (теорема 4). Тому
(теорема 4). Тому  . Згідно з теоремою 1 вектори лінійно залежні. Теорема доведена.
. Згідно з теоремою 1 вектори лінійно залежні. Теорема доведена.
2. Розглянемо деяку множину векторів  та її підмножину
та її підмножину  .
.
Означення 3. Упорядковану множину векторів називають базисом множини , якщо дані вектори лінійно незалежні, а також будь-який вектор множини лінійно виражається через вектори множини  .
.
Розглянемо в ролі множини множину векторів, які паралельні деякій прямій. Довільний ненульовий вектор цієї множини утворює базис, оскільки будь-який вектор із лінійно виражається через вибраний вектор (теорема 4). Назвемо в цьому випадку множину одновимірнимвекторним простором колінеарних векторів та позначимо  .
.
Розглянемо множину векторів, які паралельні деякій площині. Базис цієї множини утворюють два довільні неколінеарні вектори. Справді, дані вектори лінійно незалежні (теорема 4), а будь-який третій вектор даної множини через них виражається (теорема 5). Дану множину векторів назвемо двовимірним векторним простором компланарних векторів та позначатимемо дальше  .
.
Якщо в ролі множини взяти множину всіх геометричних векторів, то базис в ній утворять три довільні некомпланарні вектори. Справді, дані вектори лінійно незалежні (теорема 5), а будь-який четвертий вектор через них лінійно виражається (теорема 6). Простір всіх геометричних векторів будемо позначати  .
.
3. Розглянемо простір векторів та довільний його базис  . Довільний вектор
. Довільний вектор  можна розкласти за цим базисом, тобто подати у вигляді
можна розкласти за цим базисом, тобто подати у вигляді
 , (2) причому таке представлення єдине. Справді, припустимо, що розклад вектора можливий із іншими коефіцієнтами, тобто нехай
, (2) причому таке представлення єдине. Справді, припустимо, що розклад вектора можливий із іншими коефіцієнтами, тобто нехай  . Віднімаючи від даної рівності рівність (2), дістаємо
. Віднімаючи від даної рівності рівність (2), дістаємо  . Оскільки вектори
. Оскільки вектори  лінійно незалежні, то одержана рівність можлива тільки при нульових коефіцієнтах. Тому
лінійно незалежні, то одержана рівність можлива тільки при нульових коефіцієнтах. Тому  .
.
Означення 4. Коефіцієнти  біля базисних векторів у рівності (1) називають координатами вектора відносно базису .
біля базисних векторів у рівності (1) називають координатами вектора відносно базису .
Координати вектора записують у виді  або
або  . Рівність між двома векторами, заданими в координатній формі, будемо розуміти покоординатно, оскільки з рівностей =
. Рівність між двома векторами, заданими в координатній формі, будемо розуміти покоординатно, оскільки з рівностей = або
або  випливає, що .
випливає, що .
Нехай задані два вектори  та
та  . Тоді
. Тоді 
 , тобто
, тобто
 .
.
Аналогічно доводяться рівності

та
 ,
,
де - довільний числовий множник.
У випадку векторного простору та деякого його базису  для довільного вектора
для довільного вектора  його координати визначаються, як коефіцієнти
його координати визначаються, як коефіцієнти  біля базисних векторів у рівності
біля базисних векторів у рівності  . Записують
. Записують  або
або  . Аналогічно, як і у просторі , в просторі додавання та віднімання векторів, а також множення векторів на числа здійснюється виконанням відповідних операцій над координатами.
. Аналогічно, як і у просторі , в просторі додавання та віднімання векторів, а також множення векторів на числа здійснюється виконанням відповідних операцій над координатами.
Теорема 7. Два вектори, задані в координатній формі, колінеарні тоді і тільки тоді, коли їхні координати пропорційні.
Доведення. Нехай задані два колінеарні вектори  та
та  . Тоді вони лінійно залежні та існує число таке, що виконується рівність . Вона рівносильна координатним рівностям
. Тоді вони лінійно залежні та існує число таке, що виконується рівність . Вона рівносильна координатним рівностям  ,
,  ,
,  . Якщо
. Якщо  ,
,  ,
,  , то з попередніх рівностей випливає, що
, то з попередніх рівностей випливає, що  , тобто координати пропорційні. Якщо деякі з координат одного з векторів рівні нулю, то відповідні координати у другого колінеарного до нього вектора теж рівні нулю.
, тобто координати пропорційні. Якщо деякі з координат одного з векторів рівні нулю, то відповідні координати у другого колінеарного до нього вектора теж рівні нулю.
Навпаки, якщо виконуються рівності  , то, прирівнявши їх до , дістаємо рівність , яка означає колінеарність векторів та .
, то, прирівнявши їх до , дістаємо рівність , яка означає колінеарність векторів та .
4. Розглядаючи базис простору , ми накладали на базисні вектори тільки умови упорядкованості та лінійної незалежності. В деяких прикладних задачах обчислення спрощуються, якщо базисні вектори одиничні та взаємно перпендикулярні.
Означення 5. Базис називають прямокутним декартовим(ортонормованим), якщо вектори базису одиничні та взаємно перпендикулярні.
Щоб виділяти ортонормовані базиси використовують спеціальні позначення базисних векторів:  . Отже, згідно з означенням, базис
. Отже, згідно з означенням, базис  - прямокутний декартовий, якщо
- прямокутний декартовий, якщо  ,
,  . В просторі ортонормованим буде базис
. В просторі ортонормованим буде базис  .
.
Нехай в ортонормованому базисі задано вектор та нехай  . Відкладемо від деякої точки вектори
. Відкладемо від деякої точки вектори  ,
,  ,
,  . Очевидно, що вектор співпадає з діагоналлю прямокутного паралелепіпеда, побудованого на векторах
. Очевидно, що вектор співпадає з діагоналлю прямокутного паралелепіпеда, побудованого на векторах  , як на сторонах. Оскільки довжини сторін паралелепіпеда рівні
, як на сторонах. Оскільки довжини сторін паралелепіпеда рівні  , то за відомою властивістю діагоналі прямокутного паралелепіпеда дістаємо
, то за відомою властивістю діагоналі прямокутного паралелепіпеда дістаємо  або
або
 . (3)
. (3)
Одержана формула дозволяє обчислювати довжину вектора, знаючи його координати. Відмітимо, що коли одна або дві координати вектора рівні нулю, то при обчисленні його довжини замість довжини діагоналі прямокутного паралелепіпеда доводиться шукати довжину діагоналі прямокутника або довжину вектора, який колінеарний до одного із базисних векторів. В обох випадках дістаємо співвідношення, які є частинним випадком формули (3).
В просторі з вибраним у ньому ортонормованим базисом довжину вектора  обчислюють за формулою
обчислюють за формулою
 .
.
5. Розглянемо приклади розв’язання задач.
Задача 1. У трикутнику на сторонах і вибрано точки та так, що  , а також проведено відрізки
, а також проведено відрізки  і , які перетинаються в точці . У якому відношенні точка ділить дані відрізки?
і , які перетинаються в точці . У якому відношенні точка ділить дані відрізки?
Розв’язання. Нехай  ,
,  . Оскільки
. Оскільки  , то
, то  . Виразимо всі вектори в одержаній векторній рівності через та .
. Виразимо всі вектори в одержаній векторній рівності через та .  ,
,  . Отже,
. Отже,
 .
.
Оскільки вектори та лінійно незалежні, то, прирівнюючи коефіцієнти біля цих векторів в обох частинах рівності, дістаємо систему рівнянь  , розв’язуючи яку, знаходимо
, розв’язуючи яку, знаходимо  . Отже,
. Отже,  .
.
Відповідь: .
.
Задача 2. Задано правильний шестикутник  . Нехай
. Нехай . Знайти координати векторів та
. Знайти координати векторів та  в базисі
в базисі  .
.
Розв’язання. Нехай - центр кола, описаного навколо заданого шестикутника. Очевидно, що  , а також, що
, а також, що  . Тому
. Тому 
 .
.
Відповідь:  .
.
Задача 3. Довести, що відрізки, які сполучають вершини трикутної піраміди з центрами протилежних граней, перетинаються в одній точці та діляться нею у відношенні 3:1, рахуючи від вершини.
Розв’язання. Нехай - задана піраміда і
- задана піраміда і  , точки та - точки перетину медіан трикутників
, точки та - точки перетину медіан трикутників  і відповідно, точки
і відповідно, точки  належать відрізкам
належать відрізкам  та
та  відповідно, причому
відповідно, причому  . Покажемо, що в базисі
. Покажемо, що в базисі  координати векторів
координати векторів  та
та  співпадають. Маємо
співпадають. Маємо


 , де
, де  - середина відрізка . Отже, в базисі маємо
- середина відрізка . Отже, в базисі маємо  .
.
Дальше,
 , тобто
, тобто  . Таким чином,
. Таким чином,  , тобто точки
, тобто точки  та
та  співпадають.
співпадають.
Лекція 3
Загальна афінна та прямокутна декартова системи координат. Координати точки. Поділ відрізка у даному відношенні.
1. Поняття загальної афінної системи координат. Координати точки.
2. Прямокутна декартова системи координат. Відстань між двома точками.
3. Поділ відрізка у даному відношенні.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 811; Нарушение авторских прав?; Мы поможем в написании вашей работы!