КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Таблиця 6.1
| n/nн | η | n/nн | η |
| 0,3 | 0,7 | 0,57 | |
| 0,4 | 0,25 | 0,8 | 0,63 |
| 0,5 | 0,40 | 0,9 | 0,67 |
| 0,6 | 0,50 | 1,0 | 0,7 |
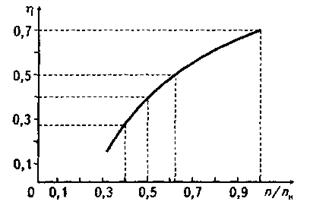
Рис. 3.8
Дійсні робочі параметри насоса мають визначатися на основі реального режиму роботи насосної установки та мережі трубопроводів із врахуванням крутості їхньої характеристики. Вони значною мірою можуть відрізнятися від значень, що можна отримати на основі формул зведення (16).
Механічна характеристика насоса має таку залежність:
| (19) |
де Мс - момент опору насоса, Нм; N - потужність, кВт; n - частота обертання, об/хв.
Реальні значення Мс істотно відрізняються від величини моменту, обчисленого за формулою зведення, яка має вигляд квадратичної гіперболи.
Залежність моменту двигуна насоса М від частоти обертання є такою:
| (20) |
де k =2...5.
Зауважимо, що менші значення k беруть для одиничних насосів, що працюють без статичного напору, а більші - для насосів, що працюють із значними статичними напорами. Так, для систем водопостачання k = 3...5.
Коли фіктивний напір насоса Нф дорівнює статичному Hст, його подача Q та ККД η дорівнюють нулю. Частота обертання, що відповідає такому граничному режимові,
| (21) |
де Нn - практично існуючий напір при роботі насоса.
Однією з основних задач автоматичного регулювання режимів роботи насосних агрегатів є визначення необхідної частоти обертання насосного агрегату для одержання потрібного режиму роботи без перевищення напору.
Формула необхідної частоти обертання насоса залежно від його характеристик і потрібної продуктивності, за якої будуть забезпечені мінімальні напори на виході насосної установки при необхідному діапазоні зміни подачі, має такий вигляд:
| (22) |
де Hh - статична складова напору; Нф - фіктивна висота підйому рідини (при нульовій подачі); Qm — найбільш можлива для даних умов подача.
Статична складова подачі визначається як різниця геодезичних позначок насосної установки і споживача та вільного напору у споживача.
Під час розрахунків дійсних витрат електроенергії в керованих насосних установках слід враховувати витрати електричної енергії, що мають місце у процесі керування в керованому електроприводі.
З позицій особливостей енергозбереження можна виділити три головні принципово відмінні види керованих електроприводів.
1. Електроприводи з втратами енергії ковзання: системи ЕП з реостатом у колі ротора, ЕП з гідравлічними або електромагнітними муфтами ковзання.
2. ЕП з рекуперацією енергії ковзання: різні каскадні системи, наприклад асинхронно-вентильні каскади.
3. ЕП, що працюють без втрат енергії ковзання: частотні, вентильні та з багатошвидкісними електродвигунами.
Як показали дослідження, втрати потужності ковзання в ЕП суттєво залежать від механічної характеристики насоса і частоти обертання.
Втрати потужності ковзання у відносних одиницях в цьому разі становлять
| (23) |
де n` = n/nн - відносна частота обертання; k - показник ступеня в механічній характеристиці насоса.
При k = 2...5 максимальне значення втрат потужності ковзання становить 8...15% Pном насосного агрегату. Цим втратам відповідає частота обертання 65...80% nном. При цьому втрати потужності ковзання відносно невеликі і становлять близько 4...8% Рном насоса, що визначає (при простоті таких систем ЕП) досить широке їх використання в практиці.
Крім втрат енергії ковзання Wковз, у системах ЕП є втрати на вентиляцію, тертя в підшипниках тощо, які становлять 1...3% Рн.
Отже, загальні втрати електричної енергії W тут можна вважати рівними
тут можна вважати рівними

| (24) |
Втрати електричної енергії в ЕП, що працюють із рекуперацією енергії. У сучасних каскадних системах одна частина електричної енергії ковзання повертається в мережу живлення, а інша - губиться в ЕП.
Втрати енергії ковзання в ЕП можна визначити за формулою

| (25) |
Де Wковз - загальні втрати енергії ковзання; ηk - ККД каскаду (для сучасних систем цей коефіцієнт досить високий і становить 0,9...0,95).
У каскадних системах є сталі втрати енергії, що не залежать від енергії ковзання. Вони становлять до 3% споживаної потужності.
Враховуючи це, підсумкові втрати енергії в ЕП з рекуперацією приблизно такі:

| (26) |
|
|
Дата добавления: 2013-12-13; Просмотров: 280; Нарушение авторских прав?; Мы поможем в написании вашей работы!