КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модель Видеманна
|
|
|
|
Модель оптимальной скорости
Модель Оптимальной Скорости – предполагается, что машина сохраняет максимальную скорость, пока есть запас расстояния до предыдущей машины, и машина старается выбрать оптимальную скорость по расстоянию до предыдущей машины, когда расстояние меньше запаса. Также встречаются ее улучшения, например, модель с разделенными ускорением и торможением.
Одним из недостатков модели следования за лидером является то, что она неправильно описывает динамику одиночного автомобиля. Ускорение автомобиля в отсутствие лидера в этой модели равно нулю, в то время как разумным является предположение о стремлении водителя приблизить свою скорость к некоторой желаемой скорости v0n. Модели другого типа исходят из предположения, что для каждого водителя существует «безопасная» скорость движения v/e(dn), зависящая от дистанции до лидера. Данная скорость также называется оптимальной скоростью. В этих моделях вместо адаптации скорости к скорости лидера предполагается адаптация к оптимальной скорости. Влияние лидера косвенно выражено через зависимость оптимальной скорости от дистанции, где предполагалась адаптация скорости с запаздыванием по времени:
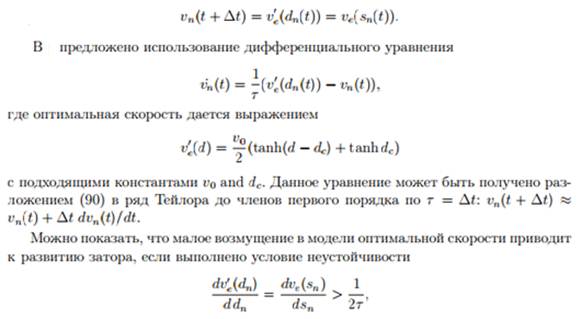
т.е. в случае большого времени релаксации ΐ или крутого вида зависимости оптимальной скорости от дистанции ve(sn). Сходные результаты получены для аналогичных моделей с дополнительным запаздыванием реакции по времени ∆t.
Модель Видеманна — предполагается, что водитель может находиться в одном из четырех состояний:
• Свободное движение — водитель старается достичь и придерживаться своей предпочитаемой скорости. Влияние предыдущих автомобилей отсутствует. В реальности скорость не может поддерживаться постоянной, и колеблется около желаемой скорости из-за несовершенства управления педали газа.
|
|
|
• Приближение — процесс адаптации скорости водителя к более низкой скорости идущего впереди автомобиля. Приближаясь, водитель нажимает на тормоз так, чтобы разница в скорости двух автомобилей стала равна нулю к моменту, когда он приблизится к впереди идущему автомобилю на безопасное для себя расстояние.
• Следование — водитель следует за идущим впереди автомобилем без ускорения или торможения, поддерживая безопасную дистанцию более-менее постоянной. Опять же, из-за несовершенства органов управления разница в скорости колеблется около нуля, но самому нулю не равна.
• Торможение — применение среднего или сильного торможения, если дистанция между автомобилями становится меньше безопасной дистанции.
Такое может произойти, если скорость идущего впереди автомобиля резко изменилась, или если третья машина перестраивается перед водителем. Для каждого режима ускорение описывается как результат скорости, разницы скоростей и индивидуальных характеристик водителя и автомобиля.
Водитель переключается из одного состояния в другое тогда, когда он достигает определенного барьера, могущего быть описанным как комбинация разницы скоростей и расстояния. Например, небольшая разница в скорости может допускаться только на малых расстояниях, в то время как большие разницы скоростей заставляют приближающихся водителей реагировать намного раньше.
Способность оценить разницу скоростей и расстояние среди водителей меняется, так же как и желаемая скорость движения и безопасное расстояние. Из-за комбинации психологических аспектов физиологических ограничений эту модель также называют психофизиологической моделью следования.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 1648; Нарушение авторских прав?; Мы поможем в написании вашей работы!