КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Навигационное пространство и элементы движения судна
Классификация методов получения навигационной информации
Классификация средств и методов навигации
Все измерения навигационных параметров и других величин, не обходимые для решения задач судовождения, производятся на судне с помощью различных приборов, инструментов и устройств, называемых в совокупности судовыми средствами навигации. Они установлены непосредственно на судне и обслуживаются судовыми специалистами - штурманами, радистами, электронавигаторами, гидроакустиками.
Специальная внесудовая система естественных и искусственных средств (маяки, буи, знаки, радиостанции, отражатели, туманные станции, искусственные спутники Земли, небесные светила и др.) используемая для определения места судна и его ориентировки, называется средствами навигационного оборудования. Средства судовождения, объединенные в систему взаимодействующих между собой судовых и внесудовых устройств, носят название навигационных систем.
Сочетание судовых и внесудовых средств навигации, электронно-вычислительных устройств и индикаторов, дающих на выходе координаты места судна или другие необходимые величины, называется навигационным комплексом. С помощью навигационных комплексов автоматически одновременно решается сразу несколько задач судовождения - счисление пути, определение места судна, автоматическая выдача координат места, курса,, скорости судна и других навигацион
ных параметров, предназначенных для решения задач безопасного маневрирования и промысла.
Для оценки качества и эффективности навигационных систем используются различные критерии и характеристики. Рассмотрим их кратко.
1. Степень навигационного обеспечения определяет полноту измерения необходимого количества навигационных параметров, необходимых для навигации.
Если а - необходимое число параметров, а в - число измеряемых параметров, то степень навигационного обеспечения определяется коэффициентом к=в:а. Полное обеспечение соответствует коэффициенту к=1. При к<1 возникает информационная недостаточность, при к>1 – избыточность.
2. Диапазон измерений навигационных устройств должен соответствовать предельным (максимальным и минимальным) измерениям навигационных параметров, взятым с некоторым запасом (5-10%).
3. Погрешность навигационного устройства, определяемая как разность между показаниями измерительного прибора и истинным значением измеряемой величины, является важнейшей его характеристикой. Классификация погрешностей основана на следующих признаках:
а) в зависимости от причин появления погрешностей их разделяют на методические и инструментальные. Методические возникают от несовершенства метода измерений, инструментальные от недостатков конструкции устройства;
б) в зависимости от свойств погрешностей при многократных измерениях их разделяют на систематические и случайные
в) при учете изменения погрешностей во времени их разделяют на статические, не зависящие от времени, и динамические, являющиеся функциями времени.
4. Точность средства измерения является его статистической
характеристикой. Для определения точности необходимо знать закон распределения погрешностей. Для нормального закона распределения погрешности, наиболее часто встречающегося в практике измерений, точность характеризуется вероятностью того, что погрешность навигационного устройства не выйдет за пределы области допустимых величин.
5. Чувствительность характеризует реакцию измерительного прибора на входную величину. Количественно чувствительность характеризуется числом К = х/у где х и у - приращения входного и выходного сигналов соответственно. Чувствительности является статистической характеристикой.
6. Динамическая характеристика средства измерения определяет реакцию навигационного устройства на помеху или на измеряемую величину, меняющуюся во времени.
7. Приспособленность к внешним условиям работы определяется так. Вначале устанавливается закон распределения случайных событий, характеризующих внешние условия, затем вероятность того что точность навигационного устройства не выйдет за пределы допуска при рассматриваемых условиях.
8. Приспособленность к условиям эксплуатации характеризует средние затраты времени t1 на настройку, регулировку и обслуживание измерительного устройства по сравнению со временем его нормальной работы t2. Чем больше t1 по сравнению с t2, тем хуже приспособлено средство измерения к условиям эксплуатации.
9. Надежность - это свойство навигационного устройства безотказно выполнять свои функции при сохранении основных характеристик. Надежность бывает инструментальная и методическая. Инструментальная надежность зависит от безотказной работы всех элементов устройства, а методическая - от безотказности метода измерения.
10. Живучесть определяет способность навигационного устройства выполнять свои функции и безотказно продолжать работу при наличии повреждений или отказов составных элементов данного устройства. Количественно живучесть определяется вероятностью безотказной работы устройства при появлении отказов в отдельных его элементах.
11.Экономичность включает ряд таких характеристик, как стоимость изготовления и эксплуатации, вес и объем устройства, расход электроэнергии и т.п.
12.Степень технического совершенства средств измерений навигационного параметра определяется качеством используемых материалов, деталей, элементов радиотехники, радиоэлектроники, компенсирующими и стабилизирующими элементами, уровнем технологии изготовления и контроля качества конструкции и т.п. Чем выше и качественнее эти критерии, тем более технически совершенно навигационное устройство.
13.Эффективность - это самая обобщенная характеристика навигационного устройства. Она определяется степенью приспособленности средства измерения к выполнению навигационных задач с требуемой точностью и надежностью в течение заданного времени и в определенных условиях применения.
Так как любое из возможных измерений навигационного параметра в той или иной степени осуществляется с помощью соответствующих технических средств, не следует искусственно разобщать методы и средства измерений, методы и средства судовождения. Поэтому вопросы развития методов измерений будем рассматривать в непосредственной связи с развитием соответствующих технических средств.
Для классификации методов измерений следует выбрать несколько существенных признаков и положить их в основу разделения. На более сильные различия в навигационных средствах связаны с видом применяемого навигационного сигнала (с природой измеряемых физических величин), т.к. они решающим образом определяют особенности методов измерений. Это действительно так, потому что. радиотехнические средства измерений совершенно не похожи на магнитные или оптические измерители, гидроакустические измерители не имеют сходства с измерителями собственных колебаний изолированных физических систем и т.д. Кроме сигнала наибольшее влияние на принцип построения навигационной аппаратуры оказывает
вид первичного параметра (геометрический признак). Например, угломерные методы и средства совершенно отличны от методов и средств для измерения расстояний, скоростей и т.п.
Поэтому методы и средства навигационных измерений целесообразно классифицировать как по виду навигационного сигнала (первичному признаку), так и по виду измеряемого навигационного параметра (вторичному признаку).
В соответствии с вышеизложенным по первичному признаку (вид навигационного сигнала) все методы измерений и технические средства подразделяются на следующие виды:
1. Астрономические методы, основанные на определении координат судна путем пеленгования небесных светил, измерения угловых высот светил над плоскостью истинного горизонта, измерения углов между светилами, скоростей светил и т.п. К средствам измерения навигационных параметров при астрономических методах определения места судна относятся секстаны, наклонометры. хронометры, пеленгаторы и радиосекстаны.
2. Светотехнические или оптические методы (с выделением инфракрасных и лазерных), основанные на применении естественник и искусственных источников света (маяки, огни, небесные светила, лазерная техника). Соответствующими техническими средствами измерений будут являться секстаны, пеленгаторы, инфракрасные пеленгаторы, лазерные системы для измерения направлений, расстояний и скоростей, лазерные гироскопы и др.
3. Звуковые или акустические методы, учитывающие особенности распространения и отражения при относительном движении судна в навигационном пространстве. К средствам измерений относятся эхолоты, гидролокаторы, эхоледомеры, шумопеленгаторы.
4. Геомагнитные методы, использующие навигационные свойств магнитного поля Земли, которые реализуются с помощью таких технических средств, как магнитные и геомагнитные компасы, геоэлектромагнитные измерители скорости и другие устройства.
5. Геофизические методы, использующие особенности рельефа береговой черты и морского дна. Эти методы измерения навигационных параметров положены в основу визуальных, гидроакустических и радиолокационных определений места судна с помощью следующих средств измерений: дальномеров, пеленгаторов, радиолокаторов, эхолотов и гидролокаторов.
6. Гравитационные методы (с выделением инерциальных), учитывающие гравитационное поле Земли, суточное вращение Земли,
неоднородность распределения гравитационного поля Земли, а так же инерциальные силы, возникающие от ускорений при движении объекта навигационной информации. Гравитационные методы измерений реализуются соответствующими техническими средствами: гирокомпасами, гироазимутами, гировертикалями, гироскопическими указателями широт, гиростабилизаторами, различного рода инерциальными системами.
7, Радиотехнические методы (с выделением допплеровских), применяющие для навигационных целей временные, амплитудные, частотные, фазовые и другие характеристики электромагнитных излучений. К радиотехническим средствам измерений относятся различные виды радиопеленгаторов, приемоиндикаторов импульсных, фазовых и импульсно-фазовых радионавигационных систем, системы спутниковой навигации, радиодопплеровские системы, радиосекстаны, радиоинтерферометры и др.
В зависимости от вида измеряемого навигационного параметра методы и средства измерений подразделяются на:
1. Азимутальные или угломерные, в которых изолиния, отвечающая одному и тому же значению измеряемого навигационного пара метра, соответствуем равным значениям прямых и обратных пеленгов (азимутов) на опорный пункт. В эту группу средств измерений входят:
- оптические пеленгаторы в сочетании с маяками, естественными ориентаторами, небесными светилами, дающие возможность определения направлений с судна на ориентир;
- радиопеленгаторы в комбинации с радиомаяками ненаправленного действия, с помощью которых также определяется направление с судна на радиомаяк;
- створные радиомаяки, обеспечивающие следование судна по одному определенному направлению.
2. Дальномерные или стадиометрические методы и средства, в которых изолинии (окружности) соответствуют равным расстояниям до опорной станции. К дальномерным техническим средствам относятся:
- оптические дальномеры и радиодальномеры, дающие возможность определения расстояний до опорных пунктов;
- радиолаги, с помощью которых определяются приращения расстояний до опорных станций.
3. Разностно-дальномерные или гиперболические методы и средства, изолинии (гиперболы) в которых соответствуют равным разностям расстояний до передающих станций. В эту группу средств вводят:
- гиперболические радионавигационные системы "Лоран-А" и "Лоран-С", дающие возможность определения разностей расстояний до передающих станций;
- фазовые зонды и фазовые радионавигационные системы "Декка-навигатор", "Дектра", "Омега", РСВТ, "Брас" и другие, дающие возможность определения приращений разностей расстояний до передающих станций;
- частотно-фазовые (радиально-скоростные) системы, основанные на использовании искусственных спутников Земли, дающие возможность определения разностей расстояний между судном и последовательным положением быстро перемещающегося ИСЗ по скорости сближения судна со спутником.
4. Азимутально-дальномерные или полярные методы и средства, с помощью которых получают изолинии равных пеленгов на опорный пункт (пеленги, изопе
ленги) и равных расстояний от судна до опорного пункта (окружности, сферические окружности). К азимутально-дальномерным средствам относятся:
- судовые навигационные радиолокационные станции в сочетании с пассивными радиолокационными отражателями или радиолокационными маяками, дающие возможность определения места в полярных координатах (полюсом в данном случае является судно);
- береговые радиолокационные станции и маяки-ответчики, дающие возможность определения места судна в полярных координатах (полюсом является место установки береговой РЛС);
- береговые щумопеленгаторные станции, которые решают ту же задачу, что и береговые РЛС;
- частотные (допплеровские) радионавигационные системы, основанные на использовании ИСЗ, дающие возможность определения места судна по направлению с ИСЗ на судно и расстоянию между ними, определяемыми по скорости и ускорению их сближения.
5. Высотно-азимутальные методы, в которых изолинии соответствуют равным значениям видимой высоты (сферическая окружность) и азимута светила (изопеленга). В группу высотно-азимутальных средств входят:
- радиосекстаны, дающие возможность определения видимых высот и азимутов Солнца и Луны;
- радиосекстаны или звездные радиоинтерферометры, работающие по дискретным источникам космического радиоизлучения, дающие возможность определения видимых высот наиболее "ярких" радиозвезд;
- устройства, работающие по излучению ИС3 дающие возможность определения видимых высот и азимутов искусственных спутников Земли.
Приведенная классификация не полностью охватывает существующие методы и средства измерений, в ней не в полном объеме указаны многочисленные комбинированные радиотехнические навигационные методы и средства, которые в последние годы находят все более широкое применение в навигации.
Существуют иные признаки классификации методов и средств намерений навигационного параметра: по характеру автономности, характеру непрерывности процессов измерения, области их применения, уровню автоматизации процессов измерений, наконец, по математической природе навигационного сигнала (скаляр, вектор, тензор и т.д.).
Так, по характеру автономности все методы и средства измерении делятся на:
- автономные, действие и использование которых на судне не связано с работой внесудовых установок;
- полуавтономные, основанные на использовании различных видов сигналов, излучаемых с борта судна для определения направлений на ориентиры или расстояний до них. Работа таких систем навигации может быть нарушена как естественными, так и организованными помехами;
- неавтономные, основанные на использовании радиостанций, маяков, различных световых навигационных композиций (системы ограждения навигационных опасностей плавучими предостерегающими светящимися знаками), созданных для целей управления судном Работа таких систем полностью зависит от средств навигационного оборудования, а также естественных и искусственных помех.
По характеру непрерывности процессов измерений методы и средства подразделяются на:
- дискретные, измерения в которых осуществляются в определенные или случайные интервалы времени;
- непрерывные, выполняющие измерения в течение любого времени движения судна;
- ограниченные, функционирующие только в определенное время суток (днем, ночью, в навигационные сумерки) или года (светящиеся средства навигационного оборудования в полярный день прекращают свбй работу);
- смешанные, обладающие всеми или некоторыми из перечисленных выше признаков.
В зависимости от области применения методы и средства измерений подразделяются на следующие:
- ближнего действия, используемые для заходов и выходов из портов, гаваней, узкостей и для прибрежного плавания, а также плавания во внутренних водах;
- среднего действия, применяемые для целей навигации на средних удалениях от берегов с потерей и без потери их видимости.
- дальнего действия, используемые для навигации судов, удаленных от источников навигационной информации на сотни и тысячи миль
- глобальные, обеспечивающие навигацию в любой точке мирового океана.
В зависимости от уровня автоматизации процессов измерений методы и средства разделяются на:
- неавтоматические, когда измерение и обработка информации производятся с участием человека в основном вручную. При этом используются различные счетно-решающие линейки, номограммы, планшеты, карты, измерительные и чертежные штурманские инструменты;
- полуавтоматические, которые позволяют часть наиболее трудоемких процессов измерения и обработки информации получать автоматически;
- автоматические, которые предусматривают автоматизацию всех процессов измерений и обработки информации.
Те средства измерений, которые не входят ни в одну из классификационных групп, в основном являются механическими и, как правило, сохраняют свое видовое наименование с прибавлением типового названия, например, лаг забортный, лот ручной, хронометр морской и т.п.
В зависимости от математической природы все измеряемые навигационные физические величины могут быть подразделены на виды: скалярные, векторные и комбинированные.
Так, если измеряемая физическая величина (параметр) является скалярной, например давление, температура и т.п., то навигационное устройство, предназначенное для измерения этой величины, состоит из чувствительных элементов (ЧЭ), преобразователей (Пр), измерительной схемы (ИС), усилителей (У) и устройств отображения информации (СИ)
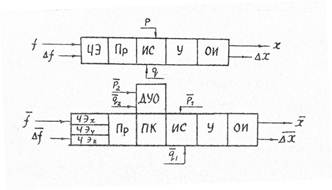
Чувствительный элемент реагирует на входной сигнал f, а преобразователь превращает выходной сигнал чувствительного элемента в другой сигнал, удобный для обработки информации. Измерительная схема решает задачу выработки навигационного параметра как конечного результата измерения физической величины. Усилитель изменяет уровень выходного сигнала до величины, необходимой для воспроизведения сигнала на устройстве отображения информации.
Ни вход таких навигационных устройств кроме полезного сигнала могут действовать возмущения  , вызванные погрешностями метода измерения, а также внешние помехи р (вибрация, влажность, внешняя температура и т.п.) и внутренние шумы q (силы трения, люфты и другие конструктивные недостатки деталей и узлов устройства).
, вызванные погрешностями метода измерения, а также внешние помехи р (вибрация, влажность, внешняя температура и т.п.) и внутренние шумы q (силы трения, люфты и другие конструктивные недостатки деталей и узлов устройства).
Сигналы  являются вредными и вызывают погрешность
являются вредными и вызывают погрешность  на выходе навигационного устройства.
на выходе навигационного устройства.
При измерении навигационных параметров и их обработке требуется отфильтровать помехи и добиться на выходе навигационной величины х в "чистом", неискаженном виде.
Если измеряемая физическая величина является векторной, например, скорость и ускорение тел, напряженность магнитного, электростатического, гравитационного и других полей, то навигационные устройства, предназначенные для измерения таких векторных физических величин  , содержат систему чувствительных элементов (ЧЭх;,ЧЭу, ЧЭz), которые ориентированы по осям " приборной" системы координат Отличительной особенностью этой схемы является преобразователь координат
, содержат систему чувствительных элементов (ЧЭх;,ЧЭу, ЧЭz), которые ориентированы по осям " приборной" системы координат Отличительной особенностью этой схемы является преобразователь координат
(ПК), который преобразует сигналы измеренной векторной величины из приборной системы координат в навигационную. Датчик угловой ориентации (ДУО) содержит систему чувствительных элементов, реагирующих на угловые движения, и устройства для преобразования, обработки и воспроизведения информации.
Погрешности выходного сигнала  зависят от входной погрешности метода измерения
зависят от входной погрешности метода измерения  , возмущений и помех
, возмущений и помех  которые необходимо определять и учитывать.
которые необходимо определять и учитывать.
Измерение комбинированных скалярно-векторных физических величин осуществляется системами навигации, содержащими различные по принципу действия скалярные и векторные устройства.
Естественно, что различный характер помех и погрешностей или  у различных навигационных устройств позволяет поставить задачу их взаимной компенсации и тем самым повысить точность и надежность измерения навигационных параметров, а в итоге - точность определения места судна.
у различных навигационных устройств позволяет поставить задачу их взаимной компенсации и тем самым повысить точность и надежность измерения навигационных параметров, а в итоге - точность определения места судна.
Такая задача решается путем совместного (комплексного) использования различных датчиков информации в одном навигационном устройстве. Навигационные сигналы от чувствительных элементов вместе с помехами и шумами поступают на вход специального блока, называемого фильтром. В фильтре помехи и шумы компенсируются полностью (взаимоуничтожаются) или их уровень (величина) значительно уменьшается. Иными словами, в фильтре осуществляется преобразование навигационного сигнала с целью выделения его полезной составляющей. В этом и состоит сущность оптимальной обработки навигационной информации, в конечном итоге повышающей точность определяемого места судна.
При разработке и внедрении новейших навигационных систем одновременно решается и задача комплексирования навигационных измерений. Например, комплексная система курсоуказания, в котором производится совместная обработка данных гироскопического компаса и дистанционного магнитного компаса; система автоматического получения счислимых и обсервованных координат, в которой
используются радионавигационные и радиолокационные датчики; комплексная система с использованием искусственных спутников земли и т.п.
Навигационная информация – это совокупностьданных, позволяющая на любой момент времени определить в некоторой системе отсчета положение судна в навигационном пространстве относительно какой-либо навигационной точки (навигационного ориентира). Наиболее важным для практики при этом следует считать четкое представление о том как происходит формирование такой информации в реальних условиях плавания судна, её источники, способы получения, методы передачи, восприятия и реализация на судне.
Важной характеристикой вождения подвижных обьектов является навигационое пространство, в котором локализуется перемещающийся по детерминиро
ванной траектории навигационный сигнал. Двухмерное навигационное пространство с увеличением дальности дкйствия тезнических средств и значительными расстояниями между навигационными ориентирами дает криволинейные траектории движения навигационных сигналов. Простейшим видом навигационного пространства является линеанизированное навигационное пространство в виде плоскости (карты). Когда навигация ограничивается малими расстояниями судоводителей впоєне удовлетворяет навигационное пространство в виде плоскости. При увеличении протяженности перехода и использовании средств дальній или глобальной навигации навигационное пространство рассматривается уже в виде сферической или сфероидической поверхности. Из-за сложности аналитических зависимостей на криволинейных поверхностях при решении навигационных задач от сферического или сфероидического навигационного пространства перходят к плоской модели пространства, то есть расчеты производят для линенизированного пространства и вводят специальные поправки за сферично сит или сфероидичность Земли, рефракцию и запаздывание навигационного сигнала.
Знание элементов движения судна как начальне сведения из основ судовождения имеют большое практическое значение так как на этом матери але базируется все «Судовождение» как цикл наук. Работа судоводителя по обеспечению безопасного плавання в навигационном отношении немыслима без четкого определения и глубокого понимания элементов собственного движения судна, в первую очередь истинном курсе и плавании. Аналогичными должны бать представления о середах (водной и воздушной), в которых происходит движение судна, и каное влияние оказывает каждая середа, находящаяся в непрерывном движении, на пермещение судна.
Необходимо кметь четкое представление о том, что перемешение судна отностительно морского дна является сложным (абсолютным) движением, представлющим собою геометрическую сумму отдельных составляющих: собственное движение судна под. действием движителей отностиельно воды (относительное перемещение) и перемещение под. действием подвижности воздушной (влияниеиветра) и водной (влияние течения) сред – это движение можно назвать переносным.
Для болем четкого понимания элементов движения судна рекомендуется понятия истинного курса, дрейфа, путевого угла при дрейфе, линии пути при течении, при дрейфе и течении отработать на сфере и рассматривать их как сферические углы с вершиной в месте наблюдателя. А затем перенести эти понятия на плоскость карты и измерять их плоскими уграми. Все эти понятия явлются исходными для изучения важного раздела курса «Навигация» - счисление пути судна и ведения прокладки на морской навигационной карте.
Измеренные или рассчитанные по величине различные элементы движения судна по своей сути являються навигационными параметрами. Для контроля за безопасным движением судна используют измерения различных физических и геометрических величин, котре тоже будут навигационными парметрами. По спо
собам измерения и получения их разделяют на первичные и вторичные. Для получения истинного места судна результаты измерений навигационных параметров обрабатываются с целью получения обсервованого места судна.
Получение навигационного сигнала, по котрому измерют величины навигационных параметров тесно связано с определенными физическими явлениями или процессами, на которых базируется современное судовождение:
- магнитное поле Земли;
- гравитационное поле Земли;
- своиства инерции физических тел.;
- механические колебания среды (акустика);
- электоромагнитные колебания;
- собственные колебания изолированных физических тел..
В зависимости от явлений применяются различные принципы испоьзования этого явления для получения нужной навигационной информации даже построения навигационных приборов.
|
|
Дата добавления: 2013-12-13; Просмотров: 1401; Нарушение авторских прав?; Мы поможем в написании вашей работы!