КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Таблиця 3.3 - Характеристики демагнетизаторів
|
|
|
|
Рисунок 3.5 – Способи запобігання розмагнічування деталей
3.3 Особливості намагнічування в постійному, змінному та імпульсному магнітних полях
Процес намагнічування феромагнітного матеріалу - це зміна намагніченості речовини під дією зовнішнього магнітного поля. Насичення феромагнетика настає, коли напрямок результуючого вектора намагніченості доменів наближається до напрямку зовнішнього поля. В магнітному неруйнівному контролі намагнічування ОК проводять постійним, змінним та імпульсними полями.
При намагнічуванні постійним полем в ОК створюють постійне магнітне поле напруженістю Hmax, якої досить для насичення матеріалу, як це вказано на рис. 3.6. Вважається, що в полі напруженістю Hmax практично досягається насичення, якщо зменшення напруженості поля на 25% (до значення Hmax) зумовлює зменшення залишкової індукціїB r і коерцитивної сили H c не більше, ніж на 1%. Намагнічування може бути здійснено за допомогою постійного магніту або електромагніту. Переваги намагнічування в постійному полі - його стабільність та відсутність впливувихрових струмів. Водночас необхідно вказати на складність побудови випрямлячів на великі струми. Легко перевірити, що, наприклад, для намагнічування до насичення (Н=3,2к A/м) циркулярним способом зовнішньої поверхні гайки М4 з сталі 20 необхідний струм 80 А. Тому в постійному полі намагнічують тільки малогабаритні деталі або окремі ділянки деталей.
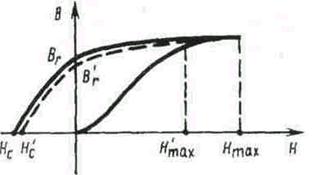
Рисунок 3.6 - Намагнічування деталі до насичення
Намагнічування в змінних полях зручніше, тому що за допомогою трансформатора вдається отримати досить великий струм. Алев цьому випадку необхідно забезпечити виключення струму в момент досягнення амплітудного значення, що технічно досить складно. При вимкненні струму в довільний момент часу потрібного намагнічення деталі досягти не вдається, що ілюструється на рис. З.7. Якщо виключення зовнішнього поля відбулося в точці 1, то зміна магнітного стану відбувається по граничній петлі гістерезису в напрямку, який вказаний стрілкою, і досягає значення B r (без врахування впливу розмагнічуючої дії кінців деталі). Якщо ж виключення відбулось в точці 2, то розмагнічування відбувається вже по іншому циклудо значення B` r, яке менше за B r. Коли виключення поля відбувається в точці З, матеріал виявляється повністю розмагніченим. Тому при такому намагнічуванні треба проводити багатократне намагнічування з виключенням поля у випадковий момент часу і подальшою оцінкою ступені намагнічення.
|
|
|
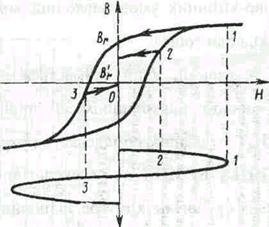
Рисунок 3.7 - Намагнічування деталі в змінних полях
Імпульсний метод намагнічування поєднуєв собі переваги намагнічування за допомогою постійного і змінного полів, але технічно вінскладний. Найчастіше імпульсне намагнічування відбувається імпульсом струму в результаті розряду конденсатора великої ємності. Тривалість і амплітуда імпульсу напруженості намагнічуючого поля повинні вибиратися такими, щоб при мінімальних енергетичних затратах і високій продуктивності забезпечити технічне насичення матеріалу. Завдяки відсутності магнітопроводу імпульсніустановки мають відносно невелику масу і є високо економічними.
Варто мати на увазі, що внаслідок впливу вихрових струмів, які виникають в ОК під час дії імпульсу, намагнічування різних областей ОК відбувається неоднаково. В той час, коли поверхневі шари намагнічуються до насичення, внутрішні області залишаються недомагніченими. Характер зміни магнітної індукції на різних радіусах r* циліндра під дією імпульсного магнітного поля зображено на рис. 3.8.
|
|
|
Таким чином, деталь в повній мірі не намагнічується. Але це якраз і дозволяє дуже ефективно зменшити вплив розмагнічуючої дії кінців деталі шляхом перемагнічування верхнього шару імпульсним полем в напрямку, протилежному до основного напрямку намагнічування в постійномуполі. При цьому імпульсним полем перемагнічується поверхневий шар деталі. В підсумку створюється своєрідне замкнуте магнітне коло (рис. 3.9).
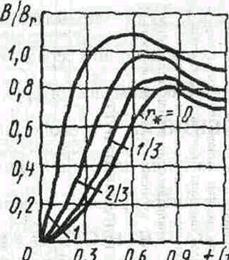
Рисунок 3.8 - Зміна імпульсу індукції в часі
Комбінацією намагнічування в постійному та імпульсному полях є намагнічування пульсуючим (випрямленим) струмом, що забезпечує намагнічування всьогооб'єму ОК постійною складовою струму і перемагнічування тільки поверхневого шару змінною складовою. При такому намагнічуванні стає можливим контролювання деталей з відношенням довжини до діаметру не більше 3 - 5. Це розширює номенклатуру об'єктів, які можуть бути контрольовані методом залишкової намагніченості.
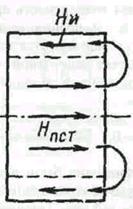
Рисунок 3.9 - Намагнічування поверхневого шару деталі імпульсним полем
Всі розглянуті способи намагнічування реалізуються в магнітних дефектоскопах різних типів. В магнітному рейковому дефектоскопі МРД-66 здійснюється поздовжнє намагнічування головки рейки полем постійних магнітів. Намагнічуючий пристрій (рис. 3.10) складається з двох магнітів із сплаву «магніко», які розташовані над двома рейковими нитками, і замикаючого ярма з магнітом'якого матеріалу
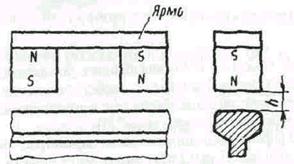
Рисунок 3.10 - Намагнічуючий пристрій рейкового дефектоскопа
Між полюсами магнітів і головкою рейок залишаються зазори h, рівні (6,0-6,5) мм, які необхідні для проходження дефектоскопа по шляхах із стиковими з’єднаннями
На рис. 3.11 показано ділянку розмагнічування петлі гістерезису, для якої експериментально визначене розташування робочої точки D (Нd=- 375 А/см та Вd= 0. 33Тл). При розташуванні магнітів поблизу головки рейки робоча точка переміщується по прямій повернення в точку Р. При вказаному робочому зазорі середнє значення магнітної індукції в головці рейки складає лише (20 - 25)% від індукції насичення рейкової сталі, яка становить 0,3 Тл для рейки Р65К; 0,35 Тл для рейки Р50К і 0,4 Тл для рейки Р43К. Напруженість поздовжньої складової магнітного поля при цьому знаходиться в межах (8-11) А/см.
|
|
|
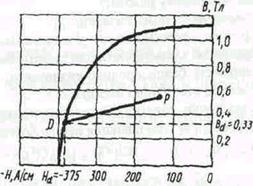
Рисунок 3.11 - Ділянка кривої розмагнічування магніту
Поздовжнє намагнічування за допомогою електромагніта здійснюється у магнітному вагоні-дефектоскопі, який призначений для швидкісної дефектоскопії рейок шляху. Рейки намагнічуються П-подібними електромагнітами постійного струму (рис. 3.12). Зазор між полюсами і рейкою становить (8 - 10) мм при довжині намагнічуваної ділянки рейки 1100 мм. Робоча частина магнітного потоку Ф р, створюється електромагнітом, інша частина, яка також замикається, створює потоки розсіяння по повітрі – Ф b, а також по колесах і рамі каретки – Ф п (заполюсні потоки). При малих намаґнічуючих струмах потоки розсіяння Ф b і заполюсні потоки Ф п малі. Із збільшенням намагнічуючого струму відносна частина робочого магнітного потокуспадає (при збільшенніабсолютного значення). Таким чином, експериментальновстановлюють намагнічуючий струм, збільшення якого не приводить до підвищення намагніченості рейки.
В деяких приладах намагнічування можна здійснювати як пропусканням струму по деталі (або стрижню в отворі деталі), так і за допомогою соленоїда або електромагніта. Так, у переносному магнітному дефектоскопі ПМД-70 циркулярне намагнічування здійснюється пропусканням імпульсного струму по ділянці деталі за допомогою спеціальних електричних контактів. Максимальна амплітуда імпульсу струму сягає 1000 А. Поздовжнє намагнічування невеликихза розмірами деталей здійснюється за допомогою соленоїда або шарнірного електромагніта, який забезпечує необхідний контакт полюсівзОК. Максимальна напруженість поля, яке створює електромагніт, 16,0 кА/м, соленоїд – 40,0 кА/м.
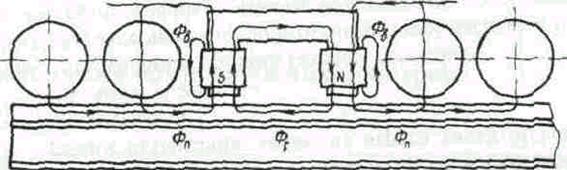
Рисунок 3.12 - Намагнічуючий пристрій вагону-дефектоскопу
Найсильніші намагнічуючі поля створюються в стаціонарних дефектоскопах. Так, у дефектоскопах УМДЕ-10000 та МДС-5 здійснюється циркулярне або поздовжнє намагнічування, причому максимальна амплітуда змінного струму або однопівперіодного випрямленого струму сягає 15 кА для УМДЕ-10000 і 7,5 кА для МДС-5. Передбачене регулювання струму, починаючи з мінімального значення 25 А.
|
|
|
Розроблені також спеціальні пристрої, які призначенідлянамагнічування постійним, змінним або імпульсним струмами при магнітопорошковому неруйнівному контролі. Вони оснащені спеціальними електричними контактами для циркулярного намагнічуванняприпропусканні струму через деталь. Поздовжнє намагнічування здійснюється за допомогою соленоїда або електромагніта. Деякі з цих пристроїв можуть бути використані і для розмагнічування деталей після контролю.
0сновні характеристики вітчизняних намагнічуючих пристроїв приведені в табл.3.1.
Із закордонних пристроїв доцільно відмітити ручні електромагніти фірми «Тіеdе» (Німеччина). Рухомі полюсні наконечники, які повертаються на 90о, забезпечують хороший магнітний контакт навіть на виробах складної форми. Більша напруженість поля надає можливість контролю без попереднього видалення захисного покриття, якщо воно не перевищує 0,4 мм по товщині. Електромагніти можуть бути оснащені електронними пристроями для плавного регулювання напруженості поля з метою правильного вибору режиму контролю. Випускаються ручні електромагніти чотирьох типів. Їх основні технічні характеристики подані в табл.3.2.
Таблиця3. 1- Характеристики намагнічуючих пристроїв
| Тип | Максимальний струм або | Тривалість | Маса, |
| напруженість поля | імпульсу, с | кг | |
| ПМД-87 | Імп. 2000 А, змінний 300 А | 1.5 | |
| МД-87П | Імп. 8000 А, змінний 4000 А | 1.5 | |
| МД-11ВП | 2500А/см /•^-^ ^..М-ч^ <^<^< /І |
Електромагніт ТWМ220 працює на змінному струмі і вмикається безпосередньо в мережу змінного струму. Він забезпечує найбільшу напруженість поля серед усіх електромагнітів, що випускаються фірмою « Тіеdе ».
Електромагніт ТWМ24 вмикається в мережу змінного струму через розділювальний трансформаторі зметоюбезпеки працює на пониженій напрузі 24 В. Він використовується для контролю всередині котлів, труб і закритих ємностей.
Ручний електромагніт ВWМ220/12 є додатковим до ручних електромагнітів типу ТWМ і завдяки малим габаритам призначений для контролю ділянок недоступних для інших електромагнітів. Він обладнаний лише одною малопотужною намагнічуючою обмоткою, тому напруженість поля тут трохи нижча, ніж у основних електромагнітів типу ТWМ. Цей електромагніт може живитися від джерела постійного струму напругою 12В.
За допомогою хрестоподібного електромагніта КWМ24 контроль зварних швів проводиться швидше і ефективніше. Цим електромагнітом з двома розташованими навхрест ярмами здійснюється комбіноване намагнічування, що дозволяє виявляти як поздовжні, так і поперечні дефекти. Два змінних поля зсунуті між собою по фазі на 90о і створюють кругове обертове поле. Кожний полюс обладнаний двома колесами,які забезпечують постійність зазору і легкість переміщення електромагніту по поверхніОК.
Електромагніт у.вигляді магнітного осердя 1 знаходиться в ручці-тримачі. На ній намотані котушки 2, які створюють магнітний потік 3. В області дефекту 4 виникає потік розсіяння Ф рас, який реєструютьза допомогою магнітного порошку або суспензії. Електромагніт обладнаний пристроєм 5 для плавного регулювання напруженості магнітного поля і кнопкою 6 для вмикання живлення.
Таблиця 3.2 – Характеристики ручних електромагнітів фірми “Tiede”
| Тип електромагніта | ТWМ22 | ТWМ24 | ВWМ22 0/12 | КWМ24 |
| Напруга живлення, В | 220;12 | 3×380 | ||
| Частота, Гц | ||||
| Переріз полюсу, мм | 27×27 | 27×27 | 27×27 | |
| Маса, кг | 4.2 | 2.7 | 3.7 | 9.2 |
| Розділювальний трансформатор | - | 220/24 | 220/24 | 3×380/24 |
| Маса трансформатора, кг | - | 6.5 | 6.5 | 15.0 |
| Напруженість, кА/м, яка створюється в залізному стрижні перерізу 50×20 мм | 9.4 | 8.3 | 8.3 | 4.3 |
| 50×50 мм | 6.8 | 6.1 | 5.6 | - |
Ручний електромагніт, що встановлений на поверхні ОК, зображений на рис.3.13.
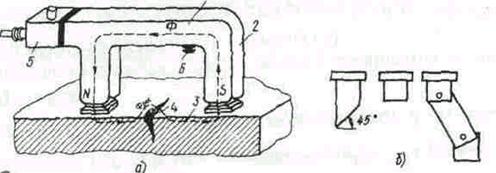
Рисунок 3.13 - Ручний електромагніт на поверхніоб'єктаконтролю (а) і полюсні наконечники для нього (б)
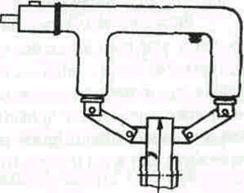
Рисунок 3.14 - Поздовжнє намагнічування ділянки диска за допомогою полюсних наконечників
Ручні електромагніти ТWМ іВWМ можуть бути комплектовані додатковими наконечниками. Вони бувають трьох видів: зрізані під кутом 45°; захисні і рухомі. Рис. 3.14 ілюструє намагнічування в поздовжньому напрямку ділянки диска за допомогою цих же наконечників. На рис. 3.15 зображене встановлення електромагніту при контролі опорних поверхонь колінчастого валу. Тут дуже важко було б здійснити намагнічування ділянки деталі без використання рухомих полюсних наконечників.
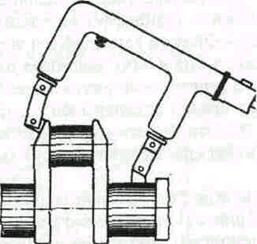
Рисунок 3.15 - Контроль колінчатого вала ручним електромагнітом
3.4 Розмагнічування об’єктів контролю
Розмагнічування деталей після контролю проводиться для зручності наступного транспортування, обробки і експлуатації. Необхідність розмагнічування зумовлено труднощами обробки і експлуатації намагнічених деталей.
Можливі два способи розмагнічування деталей. Перший - це нагрів до температури точки Кюрі, при якій самовільна намагніченість феромагнетиків зникає і вони стають парамагнетиками. Але цей спосіб практично не знаходить використання, оскільки при нагріві можуть змінитися механічні властивості матеріалу деталі, що в більшості випадків недопустимо.
Другий метод полягає у дії на об’єкт контролю змінного магнітного поля з прямуючою до нуля амплітудою. Сам процес розмагнічування полягає в тому, що ОК розташовують у соленоїді або в електромагніті і шляхом комутації постійного поля із зменшенням його напруженості або шляхом зменшення амплітуди змінного поля доводять його до розмагніченого стану. Суттєвим є вибір частоти змінного поля або частоти комутації постійного поля. Це пов’язано з впливом вихрових струмів, який тим більший, чим більші габарити деталі і її магнітна проникність. Внаслідок складної залежності характеру розподілу вихрових струмів від конфігурації деталей частоту і амплітуду розмагнічуючого поля вибирають згідно наближених рекомендацій. Наприклад, для деталей з товщиною стінок (2 – 3) мм з матеріалу із Hc =(1,0 – 1,5) кА/м можна використовувати струм промислової частоти 50 Гц. Для деталей з товщиною стінок до 30 мм частота повинна бути порядку одиниць герц. Із збільшенням значення Hc внаслідок спаду магнітної проникності вихрові струми зменшуються і допустима товщина деталей складає (10 - 15) мм на частоті 50 Гц і (50 – 60) мм - на частоті 1 Гц.
Амплітуда напруженості розмагнічуючого поля, як правило, вибирається рівною або більшою за амплітуду намагнічуючого поля. Число періодів розмагнічування зазвичай 40 - 50, тобто зменшення амплітуди повинно бути плавним.
При розмагнічуванні великих партій деталей якість розмагнічування визначаються наступним чином. Одну з деталей нагрівають до температури точки Кюрі і охолоджують у відсутності зовнішніх магнітних полів (крім магнітного поля Землі). Потім чутливим вимірювачем магнітної індукції оцінюють максимальну намагніченість. Якщо покази вимірювача при цьому становлять деяке число a, то вважають, що деталі достатньо розмагнічені, якщо покази для цих деталей не перевищують 3a. В якості індикатора намагніченості може бути використаний прилад для вимірювання залишкової магнітної індукціїМФ-23Ф, який призначений для визначення якості розмагнічування деталей і виявлення локальних магнітних полюсів. Оцінка здійснюється по модулю і знаку різниці значень залишкової магнітної індукції в зоні контролю і на базовій відстані 20 мм. Діапазон вимірювань різниці значень магнітної індукції ±2 мТл з подавленням впливу зовнішніх магнітних полів від 0 до ±20 мкТл.
Для розмагнічування застосовують демагнетизатори - соленоїди, які живляться змінним струмом різної частоти. Їх параметри наведені в табл. 3.3.
Крім того, для розмагнічування ОК використовуються намагнічуючі пристрої МД-87П і ПМД-87. Розмагнічування в них проводиться протягом (20±5)с із зменшенням струму або видаленням деталі з центральної частини соленоїда на відстань, де напруженість поля можна вважати рівною нулю.
| Тип | Фірма | Характеристика розмагнічуючого поля | Частота, Гц | Розміри соленоїда, мм |
| NF2-400S | «Karl Deutsch» | 240 А/см | 0.5... 3 | 400х400 |
| SB 911 SB 1619 SB 2824 | «Magnaflux» | 8800 А 12000А 7500 А | 225х275 400х475 600х700 | |
| 100-021 100-022 100-023 | «Shimadzu» | 7700 А 7000 А 6000 А | 711х375 229х279 Діаметр 150 | |
| MP-10 И МР-11 И | CCCР | 350 А/см | 2... 4 | 500*600 250*250 |
4 ІНДУКЦІЙНІ МАГНІТНІ ДЕФЕКТОСКОПИ
До цього виду дефектоскопів відносять такі засоби неруйнівного контролю, у яких в якості магнітного перетворювача застосовуються пасивні індукційні котушки.
4.1 Пасивні індукційні перетворювачі
Дані перетворювачі мають вигляд котушки (контуру) з кількістю витків w. Робота індукційних магнітних перетворювачів описується згідно закону електромагнітної індукції.

 (4.1)
(4.1)
де d  - зміна повного магнітного потоку за невеликий проміжок часу dt;
- зміна повного магнітного потоку за невеликий проміжок часу dt;
Ф – повний магнітний потік, який становить:
 (4.2)
(4.2)
S – площа поперечного перерізу котушки.
В формулі (4.2) введені позначення:
Н – модуль напруженості магнітного поля;
a - кут між вектором Н і нормаллю до площини котушки;
mТ - відносна магнітна проникність осердя котушки, проникність тіла, яка визначається як його матеріалом, так і формою:
 - магнітна стала.
- магнітна стала.
З формули (4.2) слідує, що пасивний індукційний перетворювач не може бути використаний для вимірювання постійних і однорідних полів.
Якщо Н=Н(х), то при русі перетворювача відносно цього поля:
 (4.3)
(4.3)
де A – коефіцієнт пропорційності, який вказує, що виникаюча е.р.с пропорційна швидкості відносного руху котушки і градієнту поля.
Коефіцієнт А збільшується при використанні котушок з осердями, які виготовлені з матеріалів із високою магнітною проникністю. Це дозволяє зменшувати габарити індукційних перетворювачів (зменшити S або w), однак при цьому характеристика стає нелінійною. Крім того магнітна проникність осердя у значній мірі визначається розмірами осердя. На практиці часто використовують комбінації котушок. Наприклад, дві, включені зустрічно котушки, утворюють двокотушковий диференціальний перетворювач.
Для однокотушкового перетворювача е.р.с розраховують за формулою:
 , (4.4)
, (4.4)
а для двокотушкового диференційного перетворювача формула (4.4) набуває вигляду:

 , (4.5)
, (4.5)
де е1 і е2 – е.р.с, що індукуються;
w – кількість витків котушки;
S - площа осердя, або площа середнього витка перетворювача без осердя;
θ1, θ2 - кути між віссю котушок і вектором напруженості вимірюваного магнітного поля;
Н1, Н2 – напруженості магнітного поля у місцях розташування котушок;
μт - магнітна проникність тіла, яка подається залежністю:
 , (4.6)
, (4.6)
де  ,
,
де d – діаметр осердя;
l – довжина осердя;
m - магнітна проникність речовини осердя.
4.2 Магнітна індукційна головка
Магнітна індукційна головка – це різновид пасивного індукційного перетворювача (рис.4.1). Вона складається з котушки 3, яка знаходиться на кільцевому магнітопроводі 2 з робочою щілиною.
Рисунок 4.1 - Схема магнітної головки
Під час руху магнітного носія 1 потік Фr розділяється на потік ФR, який зчіплюється з осердям, і на потік ФS, який його минає. Чим більше ФR , тим більша е.р.с і тим більша ефективність Е осердя магнітної головки:
 =
=  , (4.7)
, (4.7)
де ls – середня довжина магнітних силових ліній в щілині, яка має поперечний переріз Qs ;
lc - середня довжина магнітних силових ліній в осерді головки, яка має площу Qс;
 - середня магнітна проникність матеріалу осердя.
- середня магнітна проникність матеріалу осердя.
В якості матеріалів для сердечників головок використовують пермалої (79НМ, 80НХС), ферити (1000, 1000НМ). Сигнал на виході головки пропорційний градієнту поля та швидкості переміщення головки відносно поля. Магнітні головки характеризуються не тільки чутливістю, але і частотною характеристикою. При цьому у частотному спектрі вихідного сигналу можуть бути суттєво приглушені нижні гармонічні складові сигналу.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 520; Нарушение авторских прав?; Мы поможем в написании вашей работы!