КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Ферозондові магнітні дефектоскопи
|
|
|
|
5.1 Ферозондові перетворювачі
Ферозондові перетворювачі призначені для вимірювання напруженості магнітного поля. Їх принцип дії базується на нелінійності кривих намагнічування осердь із феромагнітних матеріалів. Осердя ферозонда одночасно намагнічується двома полями: постійним і змінним. Найпростіша конструкція перетворювача складається з осердя з двома обмотками (збудження і вимірювання).
На обмотку збудження подається струм, який викликає магнітну індукцію, яка в свою чергу індукує е.р.с., тобто  .
.
Рівняння для визначення е.р.с має вигляд:

 , (5.1)
, (5.1)
де Нз – напруженість збуджуючого магнітного поля;
S – площа осердя;
WB – кількість витків вимірювальної обмотки.
У рівнянні (5.1) е.р.с має тільки непарні гармоніки (І, ІІІ, V і т.д.).
При підмагнічуванні осердя постійним магнітним полем напруженістю Н0 в ньому з’являються парні гармоніки, амплітуда яких пропорційна Н0. Для обчислення амплітуди другої гармоніки використовується формула:
 , (5.2)
, (5.2)
де Е2 – амплітуда е.р.с другої гармоніки;
μФ – магнітна проникність, яка визначається формою осердя;
μ0 – магнітна стала;
f – частота збуджуючого поля.
Ферозонд характеризується чутливістю, яка може бути визначена для трьох параметрів вихідної е.р.с: по середньому, піковому та амплітудному її значеннях. Найбільша чутливість спостерігається при максимальній напруженості, яку можна описати виразом:
 , (5.3)
, (5.3)
де BS – магнітна індукція потоку насичення осердя.
Вибором μФ (розмірів осердя) та Нmax домагаються необхідної чутливості або необхідного діапазону вимірюваних полів.
Існують ферозонди різних типів та модифікацій. Але при неруйнівному контролі найбільше поширення отримали диференціальні ферозонди (рис. 5.1). Конструктивно вони містять два пермалоєвих осердя, виконаних у вигляді тонких стрижнів прямокутної форми, які покладені у спеціальні каркаси паралельно один до одного. Поверх каркасів намотані первинні обмотки, які включені послідовно і які утворюють коло збудження ферозонда. Це коло живиться змінним струмом звукової частоти. Крім первинних обмоток є також загальна вторинна обмотка. Вторинна обмотка разом з підключеним до неї індикаторним приладом утворює вимірювальне коло.
|
|
|
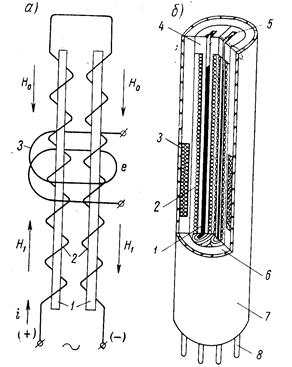
1 – пермалоєві осердя; 2 – первинні обмотки; 3 – вторинна обмотка; 4 – внутрішні каркаси; 5 – пази для осердь; 6 – зовнішній каркас; 7 – чохол; 8 – вивідні контакти.
Рисунок 5.1 – Схема (а) і конструкція (б) диференціального ферозонда
У диференціальному ферозонді первинні обмотки з’єднані таким чином, що протікаючий у них струм і створює в об’ємі осердь поля Н1, які рівні за величиною, але протилежні за напрямком. При наявності зовнішнього поля Н0, спрямованого вздовж осердь, в об’ємі одного з них діє різниця напруженостей (Н0 - Н1), в об’ємі іншого – сума (Н0 + Н1). Якщо осердя ідентичні, то можна записати:
 (5.4)
(5.4)
де  - індукції або густини магнітних потоків в осердях.
- індукції або густини магнітних потоків в осердях.
Е.р.с у вторинній обмотці, яка охоплює обидва осердя, буде рівна:
 , (5.5)
, (5.5)
де S – поперечний переріз осердь;
w2 – кількість витків вторинної обмотки;
t – час.
Поява е.р.с у вторинній обмотці диференціального ферозонда з ідентичними осердями принципово можлива лише при нелінійності характеристик B=f(H).
5.2 Режими роботи ферозондів
Незалежно від способу збудження і діючої проникності (нормальної чи диференціальної) розрізняють два основні режими роботи ферозондів. Розглянемо особливості обох режимів на прикладі роботи ферозонда з поздовжнім збудженням.
Режим перший ( )
)
В цьому режимі по колу збудження ферозонда протікає слабкий змінний і достатньо сильний постійний струм. Змінний струм створює поле  , яке настільки мале, що майже не впливає на величину диференціальної проникності осердь
, яке настільки мале, що майже не впливає на величину диференціальної проникності осердь  . Навпаки, постійний струм створює поле Н2, яке може змінювати величину . Зазвичай поле Н2 вибирають таким, щоб робочі точки осердь опинились на ділянках найбільшої крутизни функції (Н). На рис. 5.2, де зображена права гілка функції (Н), такою точкою є точка А. Вимірюване поле Н0, алгебраїчно сумуючись з полем Н2, переміщує робочу точку на ділянці DE. Якщо прийняти значення диференціальної проникності в точці А за номінальне, то при додатних значеннях вимірюваного поля Н0 проникність буде зменшуватись, а при від’ємних - збільшуватись. Ефективність управління проникністю залежить від крутизни функції (Н) в точці А (дотична FG). Якщо би поле Н2 виявилось слабким і робоча точка перемістилася з А в С, то поле Н0 не змогло би ефективно управляти проникністю .
. Навпаки, постійний струм створює поле Н2, яке може змінювати величину . Зазвичай поле Н2 вибирають таким, щоб робочі точки осердь опинились на ділянках найбільшої крутизни функції (Н). На рис. 5.2, де зображена права гілка функції (Н), такою точкою є точка А. Вимірюване поле Н0, алгебраїчно сумуючись з полем Н2, переміщує робочу точку на ділянці DE. Якщо прийняти значення диференціальної проникності в точці А за номінальне, то при додатних значеннях вимірюваного поля Н0 проникність буде зменшуватись, а при від’ємних - збільшуватись. Ефективність управління проникністю залежить від крутизни функції (Н) в точці А (дотична FG). Якщо би поле Н2 виявилось слабким і робоча точка перемістилася з А в С, то поле Н0 не змогло би ефективно управляти проникністю .
|
|
|
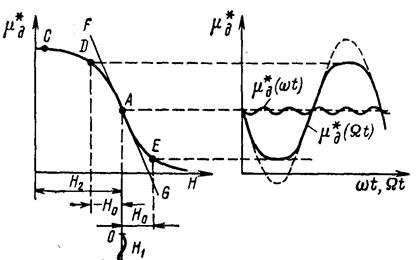
Рисунок 5.2 – Графічна інтерпретація першого режиму роботи ферозонда
Знайдемо вираз для вихідної е.р.с диференціального ферозонда в аналізованому режимі роботи.
Нехай Н0=0. Тоді з врахуванням ідентичності і зустрічного з’єднання первинних обмоток ферозонда маємо:
 (5.6)
(5.6)
де одним або двома штрихами позначені магнітні величини першого і другого осердь ферозонда відповідно.
Якщо осердя ідентичні, то  і вихідна е.р.с ферозонда у відповідності з (5.5) рівна нулю.
і вихідна е.р.с ферозонда у відповідності з (5.5) рівна нулю.
Тепер нехай  . Якщо
. Якщо  , то аналогічно з (5.6) маємо:
, то аналогічно з (5.6) маємо:

 (5.7)
(5.7)
Перші члени в правих частинах цих виразів сутність постійних складових індукції. Їх можна опустити, оскільки похідна по часу від цих складових рівна нулю. Треті члени настільки малі, що їх алгебраїчною сумою можна знехтувати. Звідси сумарна індукція:
 (5.8)
(5.8)
Враховуючи, що  і що
і що  , вираз (5.8) набуває вигляду:
, вираз (5.8) набуває вигляду:
 (5.9)
(5.9)
Вихідна е.р.с ферозонда згідно (5.5), (5.9) для випадку, коли  записується:
записується:
 (5.10)
(5.10)
До переваги розглянутого режиму роботи ферозонда можна віднести малу споживану потужність по змінному струму.
Режим другий ( )
)
В цьому режимі роботи по колу збудження ферозонда протікає тільки змінний струм. Амплітуда цього струму така, що створюване ним поле  періодично доводить осердя до стану магнітного насичення. Навпаки, вимірюване поле Н0 настільки мале, що його наявність суттєво не міняє загальної картини намагнічування осердь.
періодично доводить осердя до стану магнітного насичення. Навпаки, вимірюване поле Н0 настільки мале, що його наявність суттєво не міняє загальної картини намагнічування осердь.
|
|
|
Вимірюване поле Н0 алгебраїчно сумується в об’ємі кожного осердя з полем Н1 (рис.5.1). Якщо первинні обмотки і осердя ферозонда ідентичні, то маємо:
 (5.11)
(5.11)
звідки:
 (5.12)
(5.12)
При  і з врахуванням (5.5), (5.12) вихідна е.р.с буде становити:
і з врахуванням (5.5), (5.12) вихідна е.р.с буде становити:
 (5.13)
(5.13)
Суть роботи ферозонда у другому режимі зображена на рис.5.3.

Рисунок 5.3 – Графічна інтерпретація другого режиму роботи ферозонда
5.3 Розрахунок ферозондів
Для прикладу здійснимо розрахунок найбільш поширеного диференціального ферозонда із стрижневими плоскими осердями. При цьому заданими параметрами будуть габаритні розміри (головним чином довжина ферозонда), чутливість по другій гармоніці в режимі холостого ходу (амплітудне або ефективне значення), а також умови забезпечення стійкості нуля і низького порогу чутливості. При цьому необхідно також розрахувати вихідний опір, повний опір кола збудження, споживану ферозондом потужність.
Нехай довжина ферозонда, що проектується, буде не більше 80 – 85 мм, а чутливість при холостому ході у робочому режимі близько 25 мВ.м/а (амплітудне значення).
Враховуючи як найбільш можливе скорочення поперечних розмірів ферозонда, а також бажання виготовлення осердь методом штампування, зупиняємося на розмірах осердя 70.1,5.0,1 мм. В якості матеріалу вибираємо сплав 80НХС.
Для товщини осердя h=0,1 мм гранична частота поля збудження становить 1,6.103 Гц [8], тому задаємося f=1,5.103 Гц.
Приймаємо довжину вимірювальної обмотки lw=30 мм. Вважаємо також, що обмотка буде розташована симетрично відносно центра осердя. Звідси знаходимо:
 (5.14)
(5.14)
де N – коефіцієнт розмагнічування осердя;
 - геометричні розміри осердя;
- геометричні розміри осердя;
 - коефіцієнти форми осердя, які вибирають з [8].
- коефіцієнти форми осердя, які вибирають з [8].
Взявши табличне значення максимальної проникності для сплаву 80НХС і помноживши його на отриманий коефіцієнт, отримаємо, що співвідношення  виконується. Це дозволяє не враховувати можливі зміни проникності матеріалу і вважати, що проникність осердя в цілому визначається його формою:
виконується. Це дозволяє не враховувати можливі зміни проникності матеріалу і вважати, що проникність осердя в цілому визначається його формою:
|
|
|
 (5.15)
(5.15)
Кількість витків вимірювальної обмотки обчислюємо за формулою:
 (5.16)
(5.16)
де  - коефіцієнт, який визначається значеннями параметрів
- коефіцієнт, який визначається значеннями параметрів  котрі вказані на рис.5.3.
котрі вказані на рис.5.3.
Коефіцієнт А знаходимо з врахуванням, що  . Для умови
. Для умови  отримуємо А=0.315.
отримуємо А=0.315.
Тепер необхідно знайти коефіцієнт  . Цей коефіцієнт залежить від конструктивних параметрів і в загальному випадку може бути визначений як добуток трьох співмножників:
. Цей коефіцієнт залежить від конструктивних параметрів і в загальному випадку може бути визначений як добуток трьох співмножників:
 , (5.17)
, (5.17)
де  - коефіцієнт, який залежить від наближення осердь;
- коефіцієнт, який залежить від наближення осердь;
x2 – коефіцієнт, який залежить від середнього діаметра вимірювальної обмотки;
x3 – коефіцієнт, який залежить від шунтуючої дії осердь або яких-небудь металевих частин, які утворюють короткозамкнуті витки по відношенню до вимірювальної обмотки.
Фізичний зміст коефіцієнта x1 очевидний. Дійсно, при дотиканні двох осердь площа поперечного перерізу подвоюється, що приводить до подвоєння значення коефіцієнта розмагнічування  і до зменшення в два рази проникності осердя. Навпаки, при віднесенні осердь на відстань, рівну або більшу їх довжини, взаємодією осердь можна знехтувати. Оскільки на практиці осердя диференціального ферозонда розташовуються на близькій відстані один від одного, у всякому випадку на відстані значно меншій від їх довжини, вказана взаємодія повинна бути врахована. На основі теоретичного аналізу і дослідних даних для співвідношення
і до зменшення в два рази проникності осердя. Навпаки, при віднесенні осердь на відстань, рівну або більшу їх довжини, взаємодією осердь можна знехтувати. Оскільки на практиці осердя диференціального ферозонда розташовуються на близькій відстані один від одного, у всякому випадку на відстані значно меншій від їх довжини, вказана взаємодія повинна бути врахована. На основі теоретичного аналізу і дослідних даних для співвідношення  де L – відстань між середніми площинами осердь і l – довжина осердь, коефіцієнт x1 можна розрахувати за формулою:
де L – відстань між середніми площинами осердь і l – довжина осердь, коефіцієнт x1 можна розрахувати за формулою:
 , (5.18)
, (5.18)
де  - проникність форми системи з двох осердь;
- проникність форми системи з двох осердь;
 - геометричний параметр ферозонда.
- геометричний параметр ферозонда.
Припускаючи, що в спроектованому ферозонді відстань між осердями буде L = (2–3) мм, підставляємо відповідні значення у (5.18) і знаходимо  .
.
Коефіцієнт  , як правило, близький до одиниці. Він може бути розрахований за формулою:
, як правило, близький до одиниці. Він може бути розрахований за формулою:
 (5.19)
(5.19)
де  - середній діаметр вимірювальної обмотки.
- середній діаметр вимірювальної обмотки.
Припускаючи, що в проектованому ферозонді  , знаходимо
, знаходимо  .
.
Коефіцієнт  при проектуванні ферозонда може бути прирівнений до одиниці, оскільки в ньому використовуються плоскі осердя і решта деталей будуть виготовлені з непровідних матеріалів.
при проектуванні ферозонда може бути прирівнений до одиниці, оскільки в ньому використовуються плоскі осердя і решта деталей будуть виготовлені з непровідних матеріалів.
У відповідності з виразом (5.17) отримаємо:
 .
.
Підставляючи значення величин А і  в (5.16), знаходимо, що
в (5.16), знаходимо, що  .
.
Індуктивний опір вимірювальної обмотки ферозонда визначимо за формулою:
 , (5.20)
, (5.20)
де  і
і  - ефективне значення індуктивності і диференціальної проникності осердя відповідно;
- ефективне значення індуктивності і диференціальної проникності осердя відповідно;
S – площа поперечного перерізу одного осердя.
З врахуванням апроксимації  ламаною лінією (рис. 5.3), маємо:
ламаною лінією (рис. 5.3), маємо:
 . (5.21)
. (5.21)
Прийнявши до уваги вираз  (див. рис. 5.3), отримаємо:
(див. рис. 5.3), отримаємо:
 . (5.22)
. (5.22)
Після підстановки числових значення в (5.22) отримуємо  .
.
Вибравши для вимірювальної обмотки мідний провідник діаметром  і враховуючи середній діаметр витка
і враховуючи середній діаметр витка  , знаходимо активний опір обмотки:
, знаходимо активний опір обмотки:
 .
.
Тут  - питомий опір;
- питомий опір;
 - довжина провідника;
- довжина провідника;
 - площа поперечного перерізу провідника.
- площа поперечного перерізу провідника.
Нехтуючи ємнісним опором вимірювальної обмотки, повний опір обчислюємо за формулою:
 .
.
Значення повного опору, а також його активна і реактивна компоненти дозволяють в подальшому правильно узгоджувати ферозонд із вимірювальною схемою.
Перейдемо до розрахунку кола збудження ферозонда.
Виходячи із вибраної апроксимації  , а також з врахуванням вибраного співвідношення
, а також з врахуванням вибраного співвідношення  маємо:
маємо:
 (5.23)
(5.23)
Звідси можна обчислити ефективне значення струму збудження:
 (5.24)
(5.24)
Для обмотки збудження вибираємо провідник діаметром 0.2 мм.
На кожному каркасі півелемента довжиною 76 мм розміщується 315 витків. Тому згідно (5.24) отримуємо:
 .
.
Розглядаючи коло збудження як дві послідовно ввімкнені котушки індуктивності півелементів ферозонда, знайдемо індуктивний опір обмотки збудження:
 , (5.25)
, (5.25)
де позначення із штрихами відповідають величинам з кола збудження. Оскільки обмотки півелементів мають довжину, рівну або більшу за довжину осердь, проникність  обчислюємо за формулою:
обчислюємо за формулою:
 .
.
Порівнюючи значення  і , бачимо, що вони суттєво відрізняються одне від другого. Підставляючи в (5.25) числові значення, отримуємо
і , бачимо, що вони суттєво відрізняються одне від другого. Підставляючи в (5.25) числові значення, отримуємо  .
.
Активний опір обмотки збудження при діаметрі витка  буде:
буде:
 .
.
Повний опір обмотки збудження обчислюємо за формулою:
 .
.
Тепер можна знайти ефективне значення робочої напруги, що буде підводитись до обмотки збудження:
 .
.
Повна потужність, яка буде витрачатись на збудження ферозонду, буде визначатись:
 .
.
При цьому активна потужність:
 .
.
і реактивна потужність:
 .
.
На основі проведених розрахунків здійснюють проектування ферозондів.
5.4 Загальна характеристики і особливості конструкції ферозондових дефектоскопів
Для контролю якості труб діаметром до 170 мм застосовують ферозондові дефектоскопи з циркулярним намагнічуванням труби при її поступальному русі зі швидкістю до 3 м/с.
Найбільш універсальною і відпрацьованою є модель ферозондового дефектоскопа типу МД-10Ф, призначеного для контролю безшовних труб. У дефектоскопі є вісім обертових навколо труби ферозондових перетворювачів, сигнали яких, пропорційні зміні магнітного поля дефектів, обробляються і реєструються восьмиканальною апаратурою з осцилографічним індикатором і блоком автоматики. Дефектоскоп керує роботою пристрою сортування труб на придатні і браковані. Установка комплектується серійно виготовленими випрямлячами ВАКГ-12/6-3000 для намагнічування труб шляхом пропускання струму до 2000 А через контрольовану ділянку.
Установка МД-10Ф містить систему сканування та електронну стійку. Система сканування складається з двох скануючих барабанів із ферозондовими перетворювачами, блока струмознімання і підйомника. Електронна частина призначена для живлення ферозондових перетворювачів, а також для обробки вихідних первинних сигналів, яка передбачає їх наступну амплітудну селекцію, після якої виконується вивід сигналу-команди на сортувальні пристрої. Електронна частина установки містить наступні блоки: живлення обмоток збудження ферозондів, підсилювачів, індикації, живлення всієї установки.
Установка МД-10Фпризначена для контролю дефектів феромагнітних труб діаметром 30-145 мм із товщиною стінки до 12 мм. Вона дозволяє здійснювати контроль при швидкості до 3 м/с. Глибина зовнішніх дефектів, що виявляються, - більше 0,2 мм, а внутрішніх - 10 % від товщини стінки. Крок сканування поверхні труби вісьмома ферозондами — 25 мм.
Для напівавтоматичного контролю якості поверхні і зварних з'єднань товстостінних феромагнітних виробів типу циліндричних оболонок, барабанів котлів, корпусів реакторів на наявність дефектів (різнонапрямлених тріщин, непроварів, раковин і т.п.) на поверхні і на глибині до 5 мм розроблена ферозондова установка “Радиан-1 М”.
Принцип дії установки полягає у намагнічуванні виробу змінним магнітним полем і зчитуванні градієнтів магнітних полів розсіювання ферозондами-градієнтометрами. Установка характеризується такими основними технічними характеристиками:
- швидкість контролю – 0,033 м/с (2 м/хв);
- розміри дефектів, що виявляються, становлять, не менше 0,15 мм по глибині і 2 мм по довжині;
- кількість ферозондових перетворювачів – 3;
- ширина зони контролюзаодинпрохід установки – 60 мм;
- робоча частота генератора - 100кГц.
Існує серія ферозондових магнітних дефектоскопів, які спроектовані спеціально для контролю якості рейок. Робота дефектоскопів типу МРД-52, МРД-66, МРД-72 полягає у намагнічуванні постійним магнітом контрольованої ділянки рейки в поздовжньому напрямку і зчитуванні ферозондом поля дефекту. Вимірювальний блок дефектоскопів і система намагнічування монтується на візку з колесами, який переміщає оператор по двох рейках зі швидкістю до 4 км/год. Наявність дефектів визначається звуковим сигналом у телефонних навушниках і відхиленням стрілки міліамперметра.
Дефектоскопами типу МРД виявляють дефекти в головці рейки типу зламів, тріщин від буксування, втомних тріщин, які залягають під поверхнею катання головки рейки на глибині до 4 мм. Під полюсами магніту між поверхнею футляра і поверхнею катання головки рейки залишаються зазори (4,5-5) мм, що необхідно для проходу дефектоскопа по шляхах із стиковими з'єднаннями, які мають значне підвищення кінця однієї рейки відносно початку другої.
У дефектоскопах типу МРД-52 і МРД-66 використовуються ферозонди, у вигляді котушки з пермалоєвим осердям довжиною 7 мм та діаметром 0,25 мм. У дефектоскопі МРД-72 пермалоєве осердя ферозонда має довжину 2 мм і діаметр 0,1 мм. Додаткові бокові перетворювачі, в дефектоскопах МРД-52 і МРД-66, застосовують для вторинного контролю показів верхніх шукачів, з метою розділення сигналів від небезпечних дефектів типу поперечних втомних тріщин та від допустимих пошкоджень або структурних неоднорідностей металу.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 867; Нарушение авторских прав?; Мы поможем в написании вашей работы!