КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Прямое цифровое управление
|
|
|
|
АСУ ТП с вычислительным комплексом, выполняющим функции прямого (непосредственного) цифрового управления (ПЦУ). Основное различие между системами управления, рассмотренными выше, состоит в принципах использования вычислительного комплекса. В системе, ВК которой выполняет роль советчика оператора, не осуществляется прямое управление процессом от ЭВМ: задания по управлению вводятся оператором. Супервизорное управление также не является прямым: уставки регуляторов задаются от ЭВМ, но команды на управляющие органы объекта поступают от регуляторов.
В АСУ ТП (рис. 2), вычислительный комплекс которой работает в режиме прямого цифрового управления, сигналы, используемые для приведения в действие исполнительных механизмов, поступают непосредственно от ВК и соответствующие регуляторы вообще исключаются из системы (или используются как резерв).
В принципе регуляторы можно рассматривать как малые вычислительные машины, которые решают уравнение вида:
XРО = К0 + К1 (δ + К1 ∫ δdt + К2 dδ/dt),
\где К0, К1, К2 – параметры настройки регулятора; δ – параметр ошибки (δ = управляемая переменная – уставка). Наличие ошибки показывает, что для выведения процесса на заданную контрольную точку требуется перемещение регулирующего органа.
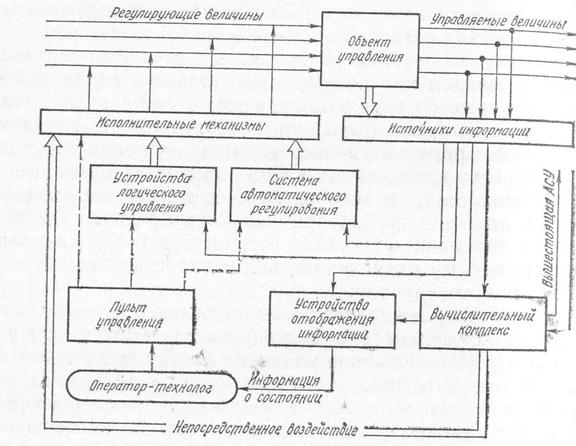 |
Рис. 2 – АСУ ТП с вычислительным комплексом,
выполняющим функции прямого цифрового управления
Однако более сложные задачи управления технологическим процессом в целом часто требуют организации взаимосогласованного действия многих отдельных регуляторов.
Концепция ПЦУ позволяет заменить регуляторы с задаваемой уставкой АСУ ТП. Вместо того, чтобы рассчитывать уставки, требуемые для оптимальной работы при супервизорном управлении, ВК рассчитывает реальные значения управляющих воздействий и передает соответствующие сигналы непосредственно на исполнительные механизмы регулирующих органов. Это делается для каждого контура управления. Число контуров может составлять от единиц до нескольких сотен в зависимости от типа процесса и мощности ВК.
|
|
|
Для более глубокого понимания принципа действия АСУ ТП с ВК, работающим в режиме ПЦУ, рассмотрим рис. 2 один контур управления. Сигнал от датчика поступает в ВК и, после преобразования его в цифровую форму, понятную арифметическому устройству, вычисляется ошибка (отклонение регулируемой величины от ее значения), которая затем используется в алгоритме управления данным контуром. Результаты вычислений получаются в цифровой форме и, в свою очередь, преобразуются выходным устройством в сигнал, воздействующий на исполнительный механизм регулирующего органа. Таким образом, контур управления контролируется и регулируется непосредственно ВК, который обращается к контурам по очереди с частотой, определяемой требованиями процесса. Уставки для контуров вводятся в ВК оператором или внешней ЭВМ, выполняющей расчеты по оптимизации процесса.
При наличии системы ПЦУ оператор должен иметь возможность изменять уставки, контролировать некоторые избранные переменные, варьировать диапазоны допустимого изменения измеряемых переменных, изменять параметры настройки и иметь доступ к управляющей программе. Для обеспечения всего этого необходимо иметь полное и функционально богатое сопряжение человека и машины – пульт оператора.
Одно из главных преимуществ применения АСУ ТП с ВК в режиме ПЦУ заключается в возможности изменения алгоритмов управления для контуров простым внесением изменений в хранимую программу. Однако такие изменения должны быть тщательно подготовлены, так как новая программа должна быть полностью проверена перед использованием ее для реального управления. Хотя это весьма серьезное требование, тем не менее гибкость системы в принципе ничем не ограничена. Некоторые внедряемые АСУ являются комбинацией системы ПЦУ и супервизорного управления. Еще одно преимущество состоит в том, что данные, собираемые от контуров регулирования, могут быть использованы для других производственных расчетов, например для сведения материального баланса.
|
|
|
Наиболее очевидный недостаток ПЦУ проявляется при отказе АСУ ТП. Несмотря на то, что надежность АСУ ТП может быть исключительно высокой, отказы тем не менее могут происходить, что в системе с ПЦУ может привести к полной потере управляемости ТОУ. Поэтому при организации любой системы с ПЦУ необходимо учитывать это обстоятельство.
|
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 1878; Нарушение авторских прав?; Мы поможем в написании вашей работы!