КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод планів
|
|
|
|
ВИЗНАЧЕННЯ ПОЛОЖЕНЬ І ПЕРЕМІЩЕНЬ ЛАНОК
Тема 2.1.
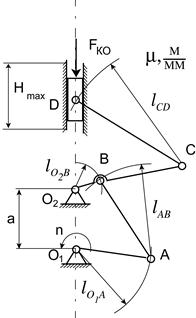
Планом положень механізму (рис. 2.1.) називається схема механізму, на якій зафіксоване певне положення ведучої ланки та пов’язані з ним положення всіх інших ланок механізму. В процесі побудови плана положень визначається геометричне місце кінематичних пар механізму. Після чого можна визначити геометричне положення ланок механізму.
|
| Рис. 2.1. План положення механізму |
При кресленні плану положень механізму необхідно застосовувати масштаби, що відповідають ГОСТ 2.302–68. Тому що надалі, при кінематичних розрахунках, використовуються величини, які є похідними від довжини. Таким чином масштабний коефіцієнт  плану механізму повинен мати розмірність [м/мм]. Масштаби, що рекомендуються: 0,0001; 0,0002; (0,00025); 0,0005; 0,001; 0,002; (0,0025); 0,005; 0,01; 0,02 і т.д.
плану механізму повинен мати розмірність [м/мм]. Масштаби, що рекомендуються: 0,0001; 0,0002; (0,00025); 0,0005; 0,001; 0,002; (0,0025); 0,005; 0,01; 0,02 і т.д.
При кресленні плану положень механізму насамперед потрібно нанести положення нерухомих центрів обертальних пар (на рис.2.1. точки  ,
,  ) і направляючих поступальних пар. Далі, для обраного положення ведучої ланки (на рис.2.1 кривошип
) і направляючих поступальних пар. Далі, для обраного положення ведучої ланки (на рис.2.1 кривошип  ), послідовно визначаються положення кінематичних пар і ланок, що приєднані до неї.
), послідовно визначаються положення кінематичних пар і ланок, що приєднані до неї.
Визначення положень кінематичних пар, що переміщуються, здійснюється способом зарубок. У цьому випадку будується геометричне місце можливих положень центрів обертальних пар. З центрів крайніх кінематичних пар (точки А і О2)найближчої до ведучої ланки групи за допомогою циркуля проводять дуги з радіусами, що дорівнюють  і
і  (відповідно). Перетинання цих дуг визначає положення центра внутрішньої обертальної пари В. З'єднавши отриману точку В прямими лініями з точками О2 і А, знаходять положення ланок
(відповідно). Перетинання цих дуг визначає положення центра внутрішньої обертальної пари В. З'єднавши отриману точку В прямими лініями з точками О2 і А, знаходять положення ланок  і
і  . У такий же спосіб визначають положення центрів інших кінематичних пар.
. У такий же спосіб визначають положення центрів інших кінематичних пар.
|
|
|
План положення будують для декількох (12 чи 24) положень ведучої ланки . При побудові планів положення механізму знаходять крайні положення робочої ланки механізму і всіх інших кінематичних пар і ланок. Робочою ланкою механізму називається ланка, що переборює силу корисного опору  (на рис. 2.1 це повзун D). За нульове положення механізму (а відповідно і положення точки
(на рис. 2.1 це повзун D). За нульове положення механізму (а відповідно і положення точки  ) приймають таке крайнє положення робочої ланки, починаючи з якої ланка починає рух у напрямку протилежному напрямку дії сили корисного опору
) приймають таке крайнє положення робочої ланки, починаючи з якої ланка починає рух у напрямку протилежному напрямку дії сили корисного опору  . Ця точка називається початком робочого ходу. Точкою
. Ця точка називається початком робочого ходу. Точкою  позначають інше крайнє положення робочої ланки, де
позначають інше крайнє положення робочої ланки, де  - це індекс попереднього положення точки
- це індекс попереднього положення точки  (наприклад
(наприклад  ).
).
Для визначення крайніх положеннь робочої ланки необхідно побудувати траєкторію руху точки  і, проаналізувавши її, вибрати два її крайніх положення. Для деяких простих механізмів існує інший спосіб: необхідно розташувати кривошип і шатун
і, проаналізувавши її, вибрати два її крайніх положення. Для деяких простих механізмів існує інший спосіб: необхідно розташувати кривошип і шатун  на одній прямій. У цьому випадку для одного положення відстань
на одній прямій. У цьому випадку для одного положення відстань  , а для іншого
, а для іншого  .
.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 309; Нарушение авторских прав?; Мы поможем в написании вашей работы!