КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 2. Управляющие поверхности самолета
Угловые отклонения обычных управляемых стабилизаторов находятся в диапазоне φст = 10...30°.Углы отклонения дифференциального стабилизатора имеют больший диапазон: φст.диф =15...35°. Скорости отклонения стабилизатора изменяются в широких пределах в зависимости от запасов устойчивости самолета и степени автоматизации управления. Ориентировочно φст=З5...60◦/с (для маневренных самолетов).
Управление тягой и вектором тяги, струйные рули. К этому виду дополнительного продольного управления в последнее время появился большой интерес в связи с освоением маневренными самолетами новых режимов полета, в котором аэродинамические органы управления становятся малоэффективными. Это в основном полеты на закритических углах атаки, при выполнении специальных пилотажных режимов типа «колокол», «кобра», на предельно малых скоростях и других режимах.
Управление вектором тяги накладывает определенные требования к компоновке двигателей на самолете. Наиболее полно этому виду управления отвечает интегральная компоновка самолета с двигателями, разнесенными на некоторое расстояние от продольной оси самолета (самолеты Су-27, МиГ-29, F-14, F-15, F-18). Благодаря такому разнесению двигателей может быть осуществлено управление самолетом как по тангажу, так и по крену.
Органами поперечного управления самолетов могут быть: элероны (внешние или внутренние, или те и другие вместе); элевоны, выполняющие функции элеронов; флапероны, выполняющие функции элеронов; интерцепторы (спойлеры); дифференциальный стабилизатор; поворотные концевые консоли крыла; поворотные сопла двигателей или струйные рули; дифференциальное изменение кривизны крыла (при адаптивном крыле).
Наиболее распространенными органами управления по крену на сверхзвуковых самолетах являются элероны, элевоны, флапероны, интерцепторы и дифференциальный стабилизатор. Элероны, флапероны, элевоны не имеют существенных конструктивных различий. Полный угол отклонения этих органов управления δэ.эв.фл=±25. Распределение углов отклонения этих органов управления осуществляется в соответствии с их функциями. Эта задача может решаться механически, если применяется смеситель механических сигналов, или электрически, если суммирование сигналов осуществляется на электронных элементах.
Интерцепторы являются весьма распространенными органами управления по крену и состоят из нескольких секций, каждая из которых отклоняется одноканальным приводом. Интерцепторы относятся к многофункциональным органам управления, так как используются для управления по крену, торможения в воздухе, на земле во время пробега, а также в качестве органа управления системы непосредственного управления подъемной силой (НУПС).
При функционировании системы НУПС интерцепторы отклоняются симметрично относительно некоторого выпущенного положения (например, δинт= +10°). Наличие аэродинамической зоны нечувствительности вблизи убранного положения ограничивает возможность их использования при малых сигналах управления (например, для демпфирования колебаний по крену). Постоянное использование интерцепторов в полете даже при умеренных сигналах снижает аэродинамическое качество. Поэтому на некоторых самолетах, особенно при совместном использовании интерцепторов и элеронов, в систему управления интерцепторами вводится зона нечувствительности с тем, чтобы в пределах малых сигналов (например, сигнал демпфирования) интерцепторы не работали, т.е. демпфирование по крену осуществлялось через канал либо элеронов, либо дифференциального стабилизатора.
Практически все приводы интерцепторов являются однокамерными. Питание приводов симметрично расположенных секций интерцепторов обычно осуществляется от одной и той же гидросистемы. В случае отказа питающей гидросистемы интерцепторы под действием отсасывающих сил могут отходить от убранного положения, а привод при этом работает в режиме демпфирования.
На самолетах с изменяемой стреловидностью элероны обычно не применяются, поскольку используются закрылки по всему размаху крыла. Для управления по крену служат в основном интерцепторы и дифференциальный стабилизатор. Однако при большой стреловидности крыла (χ>50°) интерцепторы становятся малоэффективными, и они обычно отключаются. После этого управление по крену производится только дифференциальным стабилизатором (самолеты МиГ-23, Су-24, F-11I, F-14).
Следует отметить, что дифференциальный стабилизатор, как орган управления по крену, играет весьма важную роль на высокоманевренных самолетах, которые используют для маневров большие углы атаки (самолеты Су-27, МиГ-29, F-16, F-15 и др.). На этих самолетах при выходе на закритические углы атаки эффективность канала управления элеронами (флаперонами) уменьшается, и по сигналам угла атаки их отклонение становился практически нулевым, а управление на этих режимах производится только с помощью дифференциального стабилизатора и руля направления.
В качестве органов путевого управления на самолетах могут применяться руль направления, а на земле переднее колесо шасси и дифференциальное торможение колес основных стоек шасси в качестве аварийного режима управления. На большинстве современных высокоманевренных самолетов (МиГ-29, Су-27, F-14, F-15, F-18, F-22 и др.) применяют два киля и два руля направления. Для таких самолетов необходимо эффективное путевое управление, для чего требуется значительная площадь вертикального оперения: целиком управляемый киль (самолет Ту-160). Эффект от управляемого киля такой же, как и при управляемом стабилизаторе. Применяются также дополнительные неподвижные или управляемые (поворотные) поверхности в нижней части фюзеляжа; расщепляющиеся рули (В-2, «Буран», «Спейс Шаттл»); струйные рули; носовые рули (по крену и рысканью). Угол отклонения руля направления обычно ограничен диапазоном δр.н =  .
.
Потребная скорость отклонения киля зависит от многих факторов и составляет δк = .
.
К органам управления, используемого для повышения летно-тактических характеристик самолета можно отнести; управляемые носки крыла (предкрылки); управляемые закрылки или флапероны; крыло с изменяемой стреловидностью; интерцепторы; тормозные щитки (воздушные тормоза); реверс тяги.
Изменение стреловидности крыла в основном предназначено для улучшения взлетно-посадочных характеристик самолета и повышения его аэродинамического качества в длительном полете путем оптимизации стреловидности крыла по числам М полета. Эта система достаточно инерционна, и для изменения конфигурации крыла требуется достаточно много времени (скорость изменения стреловидности крыла  близка к скорости отклонения обычных закрылков, полная перекладка от min до max осуществляется за 20...30 с).
близка к скорости отклонения обычных закрылков, полная перекладка от min до max осуществляется за 20...30 с).
На современных маневренных самолетах (МиГ-29, Су-27, F-16, F-15, F-14) носки (предкрылки) крыла и закрылки помимо выполнения традиционной функции по снижению взлетно-посадочных скоростей самолета стали широко использоваться для повышения маневренных возможностей самолета. В связи с этим значительно увеличена скорость их отклонения, которая соизмерима со скоростью отклонения основных органов (в темпе коротко периодического движения самолета), и расширен диапазон их применения по числам М полета. Эта система достаточно инерционна, и для изменения конфигурации крыла требуется достаточно много времени (скорость изменения стреловидности крыла близка к скорости отклонения обычных закрылков, полная перекладка от min до max осуществляется за 20...30 с).На современных маневренных самолетах (МиГ-29, Су-27, F-16, F-15, F-14) носки (предкрылки) крыла и закрылки помимо выполнения традиционной функции по снижению взлетно-посадочных скоростей самолета стали широко использоваться для повышения маневренных возможностей самолета. В связи с этим значительно увеличена скорость их отклонения, которая соизмерима со скоростью отклонения основных органов (в темпе коротко периодического движения самолета), и расширен диапазон их применения по числам М Полета. Эти органы управления обычно отклоняются автоматически по сигналам угла атаки и перегрузки, т.е, δпр.з = .
.
Структура системы управления современного самолета. НБУ имеет достаточно сложную структуру, что обусловлено возложением на автоматические системы важных с точки зрения безопасности полета функций по обеспечению устойчивости, управляемости и летных данных самолетов. При этом по условиям надежности управления и безопасности полета автоматические системы должны быть многократно резервированными. В связи с этим структура автоматизированной НБУ современных самолетов определяется составом достаточно большого числа различных функциональных элементов, наиболее существенными среди которых являются (см. рис.1.2):
- рычага управления (РУ) самолетом и система создания на них усилий (загрузка);
- механическая и электродистанционная системы, связывающие рычаги управления с приводами рулей. При осуществлении электродистанционной связи используется передача управляющих сигналов, как в аналоговой, так и цифровой формах, включая передачу сигналов по проводам и волоконнооптическим шинам. При электродистанционной передаче необходимо применение сервопривода (СП), преобразующего электрический сигнал в механический;
вычислители СУУ, обеспечивающие формирование закона управления самолетом, улучшение его устойчивости и управляемости; ограничение предельных режимов (ОПР) полета по углам атаки α, скольжения β, перегрузке ny, скорости v, числу М и другим параметрам; регулирование коэффициента передачи К ш, между рычагами управления и рулями; управление балансировкой самолета; осуществление контроля состояния систем и представление информации о состоянии систем в удобной для экипажа форме;
датчики положения рычагов управления, угловых скоростей, перегрузки, углов атаки и скольжения, скорости и числа М полета и других параметров, используемых в системе управления.
Эти элементы составляют управляющую часть системы управления.
Исполнительные устройства - сервоприводы и рулевые приводы (РП), включаемые в блоки управления и контроля (БУК), составляют исполнительную часть системы управления.
Сервоприводы и РП обеспечивают отработку сигналов систем, непосредственно воз действующих на рули самолета. В системах управления самолета находят применение исполнительные устройства электромеханического, электрогидравлического и гидромеханического типов. На ряде самолетов, имеющих электродистанционное управление, используются в основном электрогидравлические приводы, в которых сервоприводы и рулевой привод объединены в одном агрегате. Это приводы интегральной компоновки. Взаимодействие СДУ с приводом осуществляется с помощью специального электронного блока - блока управления и контроля. Такие системы обычно находятся в тесном взаимодействии друг с другом, поэтому в общем случае разделение системы управления на отдельные функциональные системы в известной мере условное. Кроме того, нормальное функционирование этих систем зависит от взаимодействующих с системой управления подсистем, к которым прежде всего относятся системы: автоматического управления, включая директорное и совмещенное управление тягой двигателей; воздушных сигналов (СВС); электрическою снабжения (СЭС); гидравлического питания.
На рис.1.3 показана структура автоматизированной системы НБУ современного самолета, содержащая необходимые функциональные компоненты, обеспечивающие ее работоспособность.
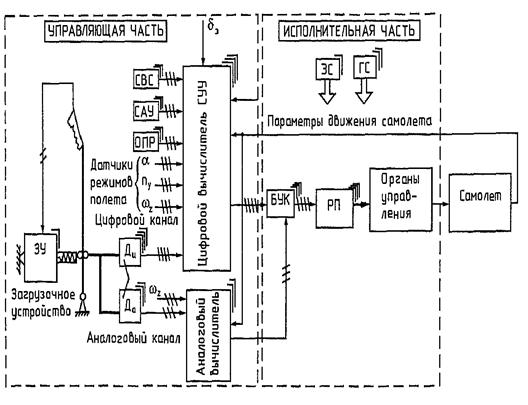 Рис.1.3. Структура автоматизированной НБУ современного самолёта
Рис.1.3. Структура автоматизированной НБУ современного самолёта
|
В 60-70 годах в управляющей части системы преобладала механическая проводка (МПУ), которая связывала все компоненты отдельных систем в единую систему управления. Ее отличают высокая надежность, стабильность характеристик, малая чувствительность к воздействию внешней среды (к давлению, электромагнитным излучениям различного рода).
Однако с усложнением алгоритмов системы обеспечения устойчивости и управляемости, а также из-за наличия свойственных МСУ недостатков, таких как инерционность, занимаемый объем, масса, трение, упругость, люфты и др., естественным шагом была замена механических связей на электродистанционные электрические. Они обеспечивают более точную отработку (передачу) сигналов управления, лучшие динамические характеристики, большую гибкость в формировании характеристик, возможность создания легкого управления вплоть до использования в качестве рычагов управления боковых рукояток, упрощение задачи комплексирования бортовых систем и введение вычислителей системы управления различных типов - аналоговых, а затем цифровых с соответствующими алгоритмами.
Однако внедрение такого управления потребовало осуществления большого комплекса работ по совершенствованию элементной базы, разработки эффективных методов резервирования, глубокого и надежного контроля состояния системы, надежного энергетического обеспечения системы, надежной защиты СДУ от воздействия внешней окружающей среды (температуры, влаги, тумана, вибрации, внешних электромагнитных полей и т.д.). Вместе с тем, когда рассматривается комплекс вопросов, касающихся перехода к СДУ, следует иметь в виду, что он связан, прежде всего, с заменой механических связей на электрические. По существу, СДУ является управляющей частью системы штурвального управления (СШУ) самолета. Необратимое бустерное управление - основа, на которой создано СДУ современных самолетов. Структуры первых систем НБУ в качестве основных устройств содержали: гидромеханический рулевой привод; загрузочное устройство рычагов управления; систему гидравлического питания; рычаги управления и механическую проводку, связывающую рычаги управления с рулевым приводом. В дальнейшем к этим устройствам добавились сервоприводы различных автоматических систем, вспомогательные приводы, регуляторы передаточных чисел, устройства ограничения предельных режимов и некоторые другие устройства, Комплексирование всех этих устройств в систему НБУ осуществлялось на основе механической системы управления.
|
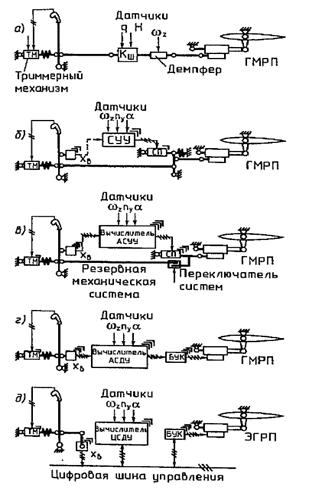
| Рис.1.4. Основные типы обобщенных структур систем управления (хв - ход рычага управления; БУК - блок управления и контроля; ЭГРП - электрогидравлический рулевой привод; ГМРП - гидромеханический рулевой привод) - с механической связью и минимальной автоматизацией (рис.1.4, а); - с механической связью и автоматизацией, определяющей необходимый уровень характеристик устойчивости и управляемости (рис.1.4, б); - электродистанционная с резервной механической связью (рис.1.4, в); - электродистанционная без механической связи, использующая аналоговую (рис.1.4, г) и цифровую технику (рис.1.4, д). |
По мере совершенствования самолетов структура НБУ насыщалась новыми устройствами и системами, необходимость которых была обусловлена особенностями статических и динамических характеристик новых компоновок самолетов и развитием новых требований к их пилотажным характеристикам надежности управления и безопасности полета. С существенным усложнением структуры система МСУ уже не отвечала уровню современных требований, предъявляемых к системам управления. Эту задачу могла лучше выполнить СДУ при условии обеспечения требуемого уровня ее надежности, по крайней мере, не хуже надежности МСУ. Поэтому дальнейшие исследования и разработки в области автоматизированных систем НБУ были связаны с внедрением резервированных СДУ вначале в рамках структур систем с разнородным резервированием (СДУ+МСУ - гибридные системы), а затем по мере отработки СДУ - практически полное исключение МСУ как функциональной системы.
Несмотря на большое разнообразие созданных за последнее время самолетов, их системы управления можно свести к нескольким основным типам обобщенных структур. Такими системами являются следующие (рис.1.4):
с механической связью и минимальной автоматизацией (рис.1.4, а);
с механической связью и автоматизацией, определяющей необходимый уровень характеристик устойчивости и управляемости (рис.1.4, б);
электродистанционная с резервной механической связью (рис.1.4, в);
электродистанционная без механической связи, использующая аналоговую (рис.1.4, г) и цифровую технику (рис.1.4, д).
Таким образом, систему управления современного самолета, имеющего автоматизированное необратимое бустерное управление, можно условно представить состоящей из двух основных частей - управляющей и исполнительной (см. рис.1.3).
|
|
Дата добавления: 2013-12-14; Просмотров: 3237; Нарушение авторских прав?; Мы поможем в написании вашей работы!