КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 15 Пилотажно-навигационные комплексы
|
|
|
|
Современные пилотажно-навигационные комплексы являются функционально законченными автоматическими системами высокого уровня, бортовая вычислительная система (БВС) которых объединяет комплекс бортового пилотажно-навигационного оборудования, систему передачи, отображения и обмена информации и систему автоматического управления. ПНК обеспечивают автоматическое и полуавтоматическое (директорное) управление взлетом, полетом самолета по заданной пространственно-временной траектории и посадкой в любых метеоусловиях.
С помощью ПНК решаются следующие навигационные задачи: расчет параметров заданного маршрута; определение вектора навигационных параметров ЛА; моделирование движения ЛА (счисление пути); комплексная обработка навигационно-пилотажной информации; коррекция счисленных координат места ЛА; навигационное обеспечение автоматического перехода на новый этап маршрута полета, предпосадочного маневрирования и захода на посадку; расчет управляющих параметров, обеспечивающих полет по линии заданного пути; индикация пилотажно-навигационных параметров, элементов навигационной обстановки; управления работой индикаторов.
К пилотажным задачам, решаемым ПНК, относятся: автоматизация управления при взлете, наборе высоты, полете по заданному маршруту, в режиме предпосадочного маневрирования, заходе на посадку и посадке; автоматизация группового полета ЛА.
Состав и структура ПНК определяются назначением ЛА, требованиями к точности и надежности выполнения полетного задания» а также необходимым уровнем помехозащищенности и допустимой стоимостью. Как правило, ПНК
ориентированы на выполнение целевых задач самолетов средней и большой дальности, магистральных самолетов гражданской авиации. Задачи, решаемые при разработке ПНК, включают выбор рационального состава измерителей первичной навигационной информации, формирование оптимальной структуры комплекса, разработку интерфейсов и т.д.
|
|
|
В своем развитии ПНК прошли несколько этапов. Современный этап характеризуется внедрением комплексов стандартного пилотажно-навигационного оборудования. Они сильно отличаются от предшественников в отношении степени автоматизации процессов самоконтроля и управления работой датчиков и систем.
Условно можно принять, что ПНК состоит из информационной и управляющей части. Ядром информационной части ПНК (информационной пилотажно-навигационной системы - ИПНС) является инерциальная навигационная система (ИНС) как наиболее универсальная и автономная система, выдающая наибольшее число навигационных и пилотажных параметров.
В состав информационной части ПНК, как правило, входят СВС или ИКВСП, радиосистемы дальней и ближней навигации (РСДН и РСБН), приемник спутниковой навигационной системы, радиовысотомер, доплеровский измеритель скорости и угла сноса и т.д.
Основу управляющей части ПНК составляют системы автоматического управления, обеспечивающие устойчивость, управляемость, стабилизацию координат полета (высоты, скорости, углов крена, тангажа и др.). Эти задачи решает автопилотная часть САУ, в которую входят контуры стабилизации продольного и бокового движения самолета.
Комплексирование приборов и систем. Комплексное применение средств навигации - это наиболее рациональное использование всей имеющейся избыточной информации для обеспечения точного и безопасного самолетовождения в условиях текущей метеорологической обстановки. ПНО современных ЛА позволяет получать навигационную информацию в объеме, превышающем минимальное ее количество, необходимое для решения задач навигации. Это дает возможность использовать избыточную информацию для повышения точности и надежности определения навигационных параметров.
|
|
|
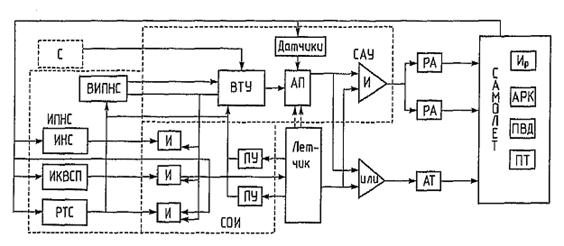 Рис. 2.21. Структурно-функциональная схема ПНК
Рис. 2.21. Структурно-функциональная схема ПНК
|
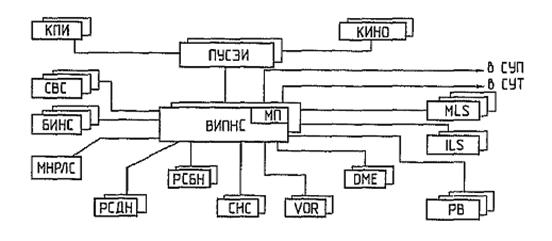 Рис. 2.22. Схема ИПНС магистрального самолета (ВИПНС - вычислитель ИПНС; БИНС - бесплатформенная ИНС; СВС - система воздушных сигналов; МНРЛС - метеонавигационная радиолокационная станция; СНС - приемник спутниковой навигационной системы; VOR, DME - устройство ближней навигации; РВ - радиовысотомер; ILS - инструментальная система посадки; MLS - сантиметровая система посадки; ПУСЭИ - пульт управления средствами электронной индикации; КПИ - комплексный пилотажный индикатор; КИНО - комплексный индикатор навигационной обстановки; МП - блок энергозависимой памяти; СУП - система управления полетом; СУТ - система управления тягой двигателя)
Рис. 2.22. Схема ИПНС магистрального самолета (ВИПНС - вычислитель ИПНС; БИНС - бесплатформенная ИНС; СВС - система воздушных сигналов; МНРЛС - метеонавигационная радиолокационная станция; СНС - приемник спутниковой навигационной системы; VOR, DME - устройство ближней навигации; РВ - радиовысотомер; ILS - инструментальная система посадки; MLS - сантиметровая система посадки; ПУСЭИ - пульт управления средствами электронной индикации; КПИ - комплексный пилотажный индикатор; КИНО - комплексный индикатор навигационной обстановки; МП - блок энергозависимой памяти; СУП - система управления полетом; СУТ - система управления тягой двигателя)
|
Комплексирование - это объединение основанных на различных физических принципах систем и датчиков навигационной информации в комплексную систему с целью повышения точности и надежности измерений. Различают два уровня комплексного применения навигационных средств.
Первый уровень характеризуется конструктивным объединением двух или более датчиков навигационной информации, измеряющих один и тот же навигационный параметр. На втором уровне (комплексной обработки навигационной информации) информация, поступающая от нескольких датчиков, обрабатывается навигационным вычислителем по специальным алгоритмам для получения точных и надежных оценок навигационных параметров движения ЛА. Качество комплексной обработки информации зависит от реализуемых алгоритмов. Как правило, используются оптимальные по отношению к выбранному критерию алгоритмы, например фильтр Калмана, являющийся статистически оптимальным алгоритмом.
Примером комплексирования первого уровня является гиромагнитный компас. В приборе объединены два независимых измерителя, действие которых основано на различных физических явлениях, а их погрешности имеют резко отличные статистические характеристики. Один измеритель - датчик магнитного курса определяет с высокой точностью среднее значение положения оси ЛА относительно магнитного меридиана, но его сигнал имеет большую и сравнительно широкополосную флуктуационную погрешность. Другой измеритель - гироскоп обладает очень узким спектром погрешностей, но среднее значение сигнала содержит нарастающую во времени погрешность вследствие прецессии гироскопа. Объединение сигналов измерений в единую систему позволяет повысить общую точность определения курса.
|
|
|
Радиотехнические системы критичны к радиопомехам, требуют при больших скоростях перемещения ЛА обеспечения высокой динамической точности составляющих устройств, что противоречит требованию повышения помехоустойчивости, так как необходимо расширение полос пропускания следящих систем.
Использование информации автономных, расположенных на борту ЛА средств измерения параметров движения, позволяет разрешить это противоречие при комплексировании с радиотехническими системами, измеряющими параметры взаимного перемещения подвижного объекта и неподвижного радиотехнического источника информации (например, маяка). Таким образом, реализуется необходимое условие повышения точности при взаимном объединении (комплексировании) измерителей - непрерывно работающей автономной бортовой системы и дискретно корректирующей измеряемую информацию радиотехнической системы, так как выполняется необходимое условие: различие в спектральных характеристиках погрешностей этих измерителей.
Такое различие имеется при объединении автономных аэрометрических, гироскопических и акселерометрических измерителей параметров движения и радиотехнических измерителей собственного и относительного движения. Так, в комплексных системах навигации радиоинерциального типа координаты местоположения, определяемые радионавигационной системой, используются для коррекции, демпфирования и изменения периода колебаний погрешностей ИНС. В свою очередь, сигналы с выхода ИНС (скорость, координаты места) вводятся в радионавигационную систему для коррекции полосы пропускания приемника.
|
|
|
Отличительной особенностью комплексной радиоинерциальной системы является ее способность обеспечивать навигацию ЛА с приемлемой точностью вне рабочей зоны радиотехнической системы, так как за время совместной работы систем определяются и запоминаются скорости дрейфов гироскопов, которые затем непрерывно компенсируются, в том числе и при полете вне рабочей зоны радиотехнической системы. Наиболее перспективной с этой точки зрения является комплексная система на основе ИНС и приемника СНС.
Структурно фуикциоиальная схема ПНК. Структурно-функциональная схема ПНК отображает состав пилотажно-навигационного оборудования ЛА и функциональные связи между его компонентами.
При автоматизированном самолетовождении алгоритм - четкое предписание, определяющее порядок решения какой-либо задачи пилотажно-навигационного процесса, можно представить в такой последовательности: процесс расчленяется на элементарные операции; элементарным операциям дается математическое описание; между элементарными операциями определяется связь (взаимосвязь); определяются элементарные операции, решаемые вычислительными устройствами исходя из возможности и целесообразности их решения; составляется схема операций пилотажного и навигационного процессов и взаимосвязей между ними.
Традиционный состав систем ПНК (рис. 2.21): ИНС; ИКВСП; радиотехнические системы (РТС); вычислитель информационной пилотажно-навигационной системы (ВИПНС); вычислитель траекторного управления (ВТУ); автопилот (АП); индикаторы основные (И), резервные (Ир) и пульты управления (ПУ); автомат тяги (AT); рулевые агрегаты (РА).
Первые четыре элемента составляют информационную пилотажно-навигационную систему. Состав ИПНС в зависимости от функционального назначения ЛА может изменяться. Элементы ИПНС, как правило, резервируются. Кратность резервирования зависит от требований к надежности системы, ее стоимости, массе и габаритным размерам. Пример ИПНС и системы отображения информации (СОИ) магистрального самолета приведен на рис. 2.22.
Следует отметить, что для самолетов бизнес - класса и вертолетов количество подсистем ИПНС и кратность их резервирования меньше, чем ИПНС магистральных самолетов. В состав ИПНС военных самолетов дополнительно вводятся корреляционно-экстремальные навигационные системы (КЭНС), обеспечивающие формирование траекторий обхода препятствий на малых высотах, а также средства и системы прицеливания, которые в совокупности с навигационными системами образуют навигационно-прицельный комплекс.
В состав САУ входят ВТУ, АП и датчики угловых скоростей и линейных ускорений. Символом С на схеме (см. рис. 2.21) обозначены иные системы, по информации которых может функционировать САУ (например, локатор, система дальнего наведения, система противозенитного маневра и др.). Индикаторы и пульты управления составляют СОИ.
Рулевые агрегаты можно рассматривать как составную часть САУ ПНК, так и оборудования планера ЛА. В состав оборудования планера входят приемники воздушного давления (ПВД), температуры (ПТ) и резервные системы, например, автоматический радиокомпас (АРК).
На структурной схеме четко прослеживаются два замкнутых контура: самолет - датчики - АП - самолет, самолет - ИПНС - САУ - самолет. Первый контур обеспечивает необходимый уровень устойчивости и управляемости ЛА (короткопериодическое движение), второй - режим автоматического управления (движение по задаваемой траектории). Летчик является контрольным звеном, исключающим возникновение нештатных ситуаций путем анализа первичной пилотажно-навигационной информации и парирования возможных отказов.
Повышение отказоустойчивости ПНК обеспечивается введением дополнительно к режиму автоматического управления режимов директорного управления (при отказе автоматического), управления по информации об отклонениях от требуемых параметров полета (при отказе директорного) и управления по первичной необработанной информации (при отказе контура управления по информации об отклонениях). Таким образом, ПНК обеспечивает четыре режима управления, что предопределяет высокую вероятность выполнения полетного задания. Автопилот всегда работает в режиме автоматического управления, обеспечивая демпфирование короткопериодических колебаний самолета; в остальных режимах управления он может быть отключен.
Проследим структурную реализацию каждого из режимов управления:
автоматического: ЛА - датчики и системы первичной информации ИПНС - ВИПНС - ВТУ - АП - РА - ЛА. Летчик по математически и логически обработанной первичной информации контролирует выполнение этапа полета и в любой момент способен включиться в контур управления;
директорного: ЛА - датчики первичной информации ИПНС-ВИПНС - ВТУ - И - летчик - РА - ЛА (РА в этом и последующих режимах - жесткое кинематическое звено);
по отклонениям (по планкам положения И): ЛА - датчики первичной информации ИПНС - ВИПНС - И - летчик - РА - ЛА;
по первичной информации: ЛА - датчики первичной информации ИПНС - И - летчик - РА - ЛА.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 10279; Нарушение авторских прав?; Мы поможем в написании вашей работы!