КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линеаризация вход-состояние
|
|
|
|
Рассмотрим задачу регулирования применительно к объекту с одним входным сигналом u, описываемому нелинейным уравнением
 .
.
Технология линеаризации вход-выход решает эту задачу в два шага:
- Найти преобразование состояния  и преобразование входного сигнала
и преобразование входного сигнала  такие, что динамика нелинейного объекта трансформируется в динамику эквивалентного линейного объекта, описываемого уравнением
такие, что динамика нелинейного объекта трансформируется в динамику эквивалентного линейного объекта, описываемого уравнением  .
.
- Использовать стандартные методы линейной теории управления, чтобы спроектировать управление u э.
Пример. Рассмотрим нелинейный объект второго порядка
 (6)
(6)
Даже хотя спроектированный линейный регулятор может стабилизировать объект в малой окрестности точки равновесия (0,0), но совершенно не очевидно, что этот регулятор может стабилизировать его в целом. Специфическая трудность заключена в нелинейности, входящей в первое уравнение состояния (6), т.к. она не может быть сокращена с помощью управляющего сигнала u.
Рассмотрим следующее преобразование состояния
 (7)
(7)
которое преобразует (6) в
 (8)
(8)
Заметим, что новые уравнения состояния также имеют состояние равновесия в точке (0,0). Теперь нелинейности могут быть сокращены с помощью закона управления в виде
 (9)
(9)
где u э эквивалентное управление (эквивалентное в том смысле, что определение u э равносильно определению u и наоборот). Этот закон приводит к линейным уравнениям состояния
 (10)
(10)
Итак, проблема стабилизации исходного нелинейного объекта, описываемого уравнениями (6) и использующего исходный управляющий сигнал u, с помощью преобразования состояния (7) и преобразования управления (9) сводится к проблеме стабилизации преобразованного объекта, используя новый управляющий сигнал u э. Теперь рассмотрим преобразованный объект, описываемый уравнениями (10). Нетрудно показать, что он является не только линейным, но и полностью управляемым. Используя хорошо известный линейный закон управления с обратной связью по состоянию  , и выбирая коэффициенты
, и выбирая коэффициенты  =2,
=2,  =0, так что
=0, так что
|
|
|
 , (11)
, (11)
получаем устойчивый преобразованный объект, описываемый уравнениями  и
и  . В рамках исходного вектора состояния найденный закон управления соответствует исходному управлению
. В рамках исходного вектора состояния найденный закон управления соответствует исходному управлению
 . (12)
. (12)
Исходное состояние x связано с z посредством соотношений
 (13)
(13)
Структурная схема замкнутой системы с полученным выше законом управления представлена на рис. 1.
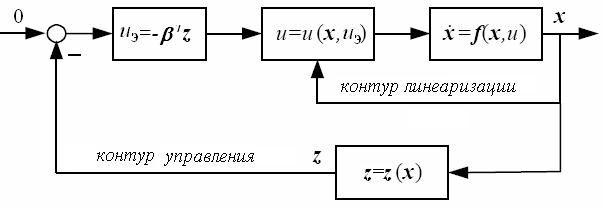
Рис. 1
Замечание. Чтобы обобщить приведенный выше метод нужно ответить на два вопроса:
- Какие классы нелинейных систем могут быть преобразованы в линейные системы?
- Каким путем можно найти соответствующие преобразования для тех систем, которые в принципе могут быть преобразованы в линейные
системы?
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 364; Нарушение авторских прав?; Мы поможем в написании вашей работы!