КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Шум протяженной цели
|
|
|
|
Как правило радиолокационные цели имеют сложную форму. Поэтому, как рассматривалось в лекции "Вторичное излучение радиолокационных целей", суммарный отраженный сигнал представляет собой векторную сумму группы отраженных сигналов от областей локального отражения цели. Движение цели относительно РЛС и её частей относительно РЛС вызывает изменения суммарного отраженного сигнала во времени, что приводит к нежелательным флуктуациям отраженного сигнала. Эти флуктуации приводят к случайным перемещениям положения энергетического центра отраженного сигнала по параметру  относительно некоторого среднего значения
относительно некоторого среднего значения  . Такие флуктуации называются "шумом" цели. Принципиально невозможно получить ошибку измерения координаты, закодированной в параметре , при наличии "шумов" цели равной нулю. Это обусловлено тем, что из-за "шумов" цели возникает флуктуационная ошибка кодирования координаты и даже при нулевых ошибках измерения текущего значения имеется ошибка в определении .
. Такие флуктуации называются "шумом" цели. Принципиально невозможно получить ошибку измерения координаты, закодированной в параметре , при наличии "шумов" цели равной нулю. Это обусловлено тем, что из-за "шумов" цели возникает флуктуационная ошибка кодирования координаты и даже при нулевых ошибках измерения текущего значения имеется ошибка в определении .
"Шумы" цели будем полагать нормально распределенными, а плотность вероятности блужданий энергетического центра , положение которого мы измеряем, будем описывать гауссовой кривой:
 , (1)
, (1)
где − математическое ожидание положения энергетического центра сигнала по параметру ;
 − среднее квадратическое значение блужданий параметра .
− среднее квадратическое значение блужданий параметра .
 − основание прямоугольника с площадью
− основание прямоугольника с площадью  и высотой в
и высотой в  .
.
Рис. 1
Вид плотности вероятности  покажем на рисунке:
покажем на рисунке:
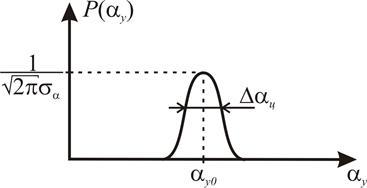
Рис. 2
Блуждания параметра из-за "шума" цели пропорционально приводят к блужданиям измеренных значений координат с эффективным диапазоном блужданий (скольких, можно определить по графикам):
|
|
|
по дальности  ;
;
по угловой координате  ,
,  ;
;
по радиальной скорости  ,
,
где  ,
,  − максимальные радиальный размер и размер цели в картинной плоскости;
− максимальные радиальный размер и размер цели в картинной плоскости;
 − ширина зубца спектра отраженного сигнала, равная эффективному диапазону блужданий энергетического центра ОС по доплеровской частоте.
− ширина зубца спектра отраженного сигнала, равная эффективному диапазону блужданий энергетического центра ОС по доплеровской частоте.
2. Взаимная корреляционная функция колебаний на выходах расстроенных по измеряемому параметру каналов обнаружения с учётом "шумов" цели.
Для последующего анализа характеристик дискриминатора определим взаимную корреляционную функцию на выходах двух каналов, построенных по схеме оптимальных корреляционных обнаружителей, с расстройкой опорного сигнала по измеряемому параметру:
 , (2)
, (2)
где  − удвоенная мощность накопленного шума;
− удвоенная мощность накопленного шума;
 − нормированная корреляционная функция накопленного шума на выходе когерентного накопителя (узкополосного фильтра);
− нормированная корреляционная функция накопленного шума на выходе когерентного накопителя (узкополосного фильтра);
 − нормированная корреляционная функция когерентно накопленного сигнала на выходе когерентного накопителя;
− нормированная корреляционная функция когерентно накопленного сигнала на выходе когерентного накопителя;
 − отношение
− отношение  на выходе когерентного накопителя;
на выходе когерентного накопителя;
 − функция рассогласования, характеризующая критичность корреляционного обнаружителя к расстройке;
− функция рассогласования, характеризующая критичность корреляционного обнаружителя к расстройке;
 − разрешающая способность по измеряемому параметру
− разрешающая способность по измеряемому параметру  , определяющая эффективную ширину функции рассогласования:
, определяющая эффективную ширину функции рассогласования:
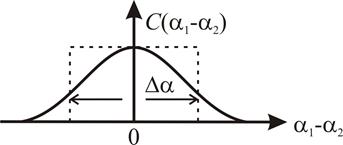
Рис. 3
Усредним по "шумам" цели произведение функций рассогласования:
где  − радикал;
− радикал;
 − каноническая форма функции рассогласования.
− каноническая форма функции рассогласования.
С учетом этого усреднения по "шумам" цели взаимная корреляционная функция
 (3).
(3).
Следовательно, среднее значение квадрата модуля корреляционного интеграла, получающиеся из последнего выражения при  и
и  , описывается выражением
, описывается выражением
 , (4)
, (4)
а его нормированное по шуму значение имеет вид:
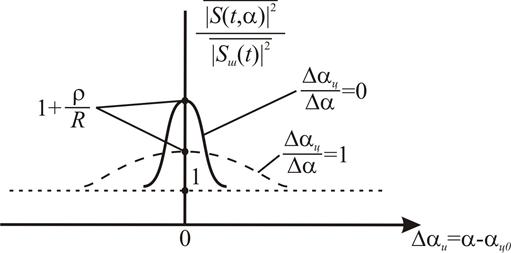
Рис. 4
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 475; Нарушение авторских прав?; Мы поможем в написании вашей работы!