КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синхронные шаговые микродвигатели
|
|
|
|
Шаговые двигатели (ШД) преобразуют управляющий сигнал в виде двоичного кода в пропорциональное ему число импульсов управления и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи (ОС). Структурная схема разомкнутой системы управления ШД представлена на рис. 4.7.
 Точность отработки угла или линейного перемещения в разомкнутой системе управления достаточно высока, в связи с фиксацией положения ротора ШД при отсутствии импульсов управления. Очевиден и недостаток привода с ШД: при сбое импульса дальнейшие перемещения происходят с ошибкой в угле, пропорциональной числу пропущенных импульсов. Поэтому в ответственных случаях применяют ШД с ОС, имеющие датчик положения ротора.
Точность отработки угла или линейного перемещения в разомкнутой системе управления достаточно высока, в связи с фиксацией положения ротора ШД при отсутствии импульсов управления. Очевиден и недостаток привода с ШД: при сбое импульса дальнейшие перемещения происходят с ошибкой в угле, пропорциональной числу пропущенных импульсов. Поэтому в ответственных случаях применяют ШД с ОС, имеющие датчик положения ротора.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному импульсу управления. Шаг a двигателя с активным ротором, выполненным в виде многополюсного постоянного магнита, определяется соотношением [2]:
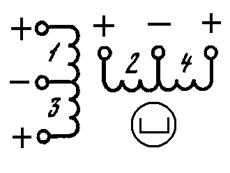
Рис.4.8
 , (4.3)
, (4.3)
где p – число пар полюсов ротора или каждой фазы статора; m – число тактов в одном цикле управления ШД.
Для создания реверсивных ШД используются трехфазные или двухфазные двухполупериодные двигатели, создающие дискретное ВМП. Обмотки статора двухфазных ШД выполняют с выводами от средних точек (рис.4.8). Таким образом, каждая фаза оказывается расщепленной на две полуфазы, и обмотка двигателя, по существу, становиться четырехфазной. Посылая в такую обмотку однополярные импульсы, сдвинутые во времени, заставляют «северный» полюс N активного ротора «следить» за «южным» полюсом статора, перемещающимся при р=1 с шагом  .
.
а) б) в)
|
|
|
Рис.4.9
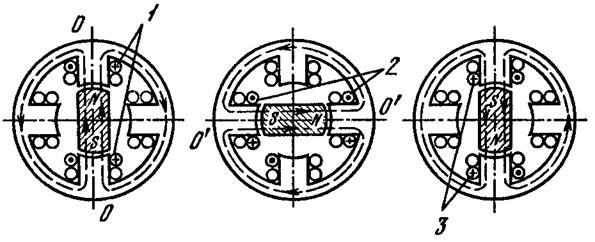
На рис. 4.9 показаны три последовательных момента протекания тока управления в фазах 1-3, перемещения МДС полюсов статора и положения ротора, соответствующие импульсам тока, показанным на рис. 4.9, а (раздельная коммутация обмоток).
Шаг в электрических градусах для активного ротора gЭЛ=pa. Поэтому каждому переключению этих импульсов соответствует сдвиг на  кривой статического синхронизирующего момента МСИНХ (рис. 4.11).
кривой статического синхронизирующего момента МСИНХ (рис. 4.11).
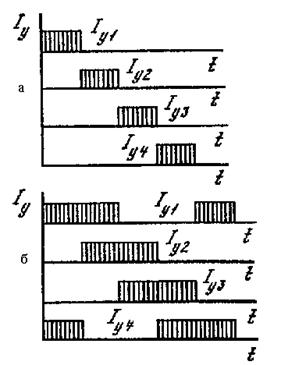
Рис.4.10 Рис.4.11
Кривая МСИНХ = f(gЭЛ) – это зависимость синхронизирующего вращающего момента МСИНХ, стремящегося совместить ось полюса ротора с осью возбужденного полюса статора при установившемся токе в обмотке, от угла gЭЛ между указанными осями. Значение gЭЛ, равное нулю, соответствует положению ротора ШД на рис.4.10,а. Сплошная кривая МСИНХ на рис.4.11 соответствует возбужденной первой фазе ШД, а штрихованная кривая – возбужденной второй фазе. Точка пересечения кривых смежных синхронизирующих моментов определяет допустимый момент сопротивления нагрузки МС ДОП. При парной коммутации обмоток фаз (рис.4.10,б) амплитуда МСИНХ возрастает (рис.4.11), что приводит к росту МС ДОП. Для реверса ШД порядок коммутации обмоток статора необходимо изменить на обратный (4-3-2-1 и т.д.).
Основные характеристики ШД – это семейство зависимостей частоты приемистости fПР от момента сопротивления МС и момента инерции JС нагрузки на валу ШД (рис.4.12). Частотой приемистости называют максимальную частоту управляющих импульсов, при которой возможен пуск ротора без выпадения из синхронизма (потери шагов). Частота fПР растет с увеличением МСИНХ, уменьшением шага ротора, снижением постоянной времени обмоток фаз, момента нагрузки и момента инерции нагрузки на валу ШД. Для устойчивой работы ШД необходимо, чтобы (МС/МMAX)£0,3¸0,5 и (JC/JДВ) £1¸2.
5. Электрические микромашины – элементы систем управления
5.1Тахогенераторы – датчики частоты вращения вала машин
|
|
|
Тахогенераторы (ТХГ) представляют собой электрические генераторы мощностью от единиц до десятков ватт, служащие для преобразования частоты вращения вала машины в электрический сигнал. Основными требованиями, предъявляемыми к ТХГ являются:
– Линейность и возможно большая крутизна выходной характеристики;
– Малое влияние на выходную характеристику нагрузки и температуры окружающей среды.
Выходная характеристика – это зависимость выходного напряжения U от частоты вращения n. Крутизна выходной характеристики KS представляет собой отношение 
По физическому принципу действия тахогенераторы могут быть синхронными, асинхронными, постоянного тока.
Синхронный ТХГ является простейшим тахогенератором переменного тока с магнитоэлектрическим возбуждением. В пазах статора, набранного из листов электротехнической стали, уложена однофазная распределённая обмотка. Ротор выполнен в виде дискообразного многополюсного постоянного магнита. При вращении ротора в статорной обмотке W1 на холостом ходу наводится ЭДС:
 , (5.1)
, (5.1)
где  - передаточный коэффициент ТХГ.
- передаточный коэффициент ТХГ.
Таким образом, при холостом ходе ТХГ выходное напряжение U=E1 и пропорционально частоте вращения n. В тоже время частота напряжения ТХГ есть функция частоты вращения. Следовательно, в нагруженном тахогенераторе реактивная составляющая сопротивления нагрузки Zн и индуктивное сопротивление обмотки самого ТХГ изменяются с изменением частоты, поэтому выходная характеристика U=f(n) нелинейна. В связи с этим, несмотря на простоту устройства и отсутствие скользящих контактов, синхронные ТХГ в автоматических системах применяются редко. Используют их в основном для измерения частоты вращения машин, подключая непосредственно к вольтметру со шкалой, отградуированной в оборотах в минуту.
Из тахогенераторов переменного тока широкое применение получили асинхронные ТХГ с полым ротором, конструкция которых не отличается от конструкции двухфазного асинхронного двигателя с полым немагнитным ротором. Асинхронным тахогенераторам присуща нелинейность выходной характеристики, которую стараются уменьшить, подключая обмотку возбуждения к источнику напряжения 400 Гц, что не всегда удобно. Выходное напряжение асинхронного ТХГ не остается постоянным по фазе при изменении частоты вращения. Фазовая погрешность зависит от характера нагрузки ТХГ и достигает нескольких градусов. Практически у всех асинхронных ТХГ выходная характеристика несимметрична – выходное напряжение U при вращении ротора в противоположных направлениях имеет различные значения, особенно при малых n. Большое влияние на несимметрию выходной характеристики оказывает нулевая остаточная ЭДСE0, т.е. ЭДС, наводимая в генераторной (выходной) обмотке при неподвижном роторе. Е0 обусловливается расположением обмоток возбуждения (ОВ) и генераторной (ОГ) не строго под углом 90град., магнитной асимметрией стали и воздушного зазора, наличием потоков рассеивания и ёмкостных связей. У большинства ТХГ Е0 составляет 30 110 мВ. В тахогенераторах при изменении температуры меняются активные сопротивления ОВ, ОГ, тонкостенного ротора, что вызывает нестабильность выходной характеристики. Диапазон измеряемых асинхронным ТХГ частот вращения ограничивается 104 об/мин.
110 мВ. В тахогенераторах при изменении температуры меняются активные сопротивления ОВ, ОГ, тонкостенного ротора, что вызывает нестабильность выходной характеристики. Диапазон измеряемых асинхронным ТХГ частот вращения ограничивается 104 об/мин.
|
|
|
Наибольшее применение в технике получили тахогенераторы постоянного тока, которые выполняют с магнитоэлектрическим или электромагнитным возбуждением. В ТХГ постоянного тока нельзя не учитывать падение напряжения на щётках UЩ, значения которого могут достигать 1 В. Поэтому уравнение для внешней характеристики ТХГ примет вид
 , (5.2)
, (5.2)
где ток якоря  . Тогда
. Тогда 
 Семейство внешних характеристик тахогенератора показано на рис. 5.1. Нелинейность характеристик при Rн ≠ ∞ объясняется влиянием реакции якоря на поток Ф, которое возрастает при больших значениях Iя, связанных с увеличением частоты вращения n и, следовательно, напряжения U. Для уменьшения этой погрешности ТХГ его нагружают на схемы с большим входным сопротивлением, например, на эмиттерный повторитель. Для минимизации другой погрешности ТХГ, связанной с падением напряжения на щётках, последние выполняют медно-графитовыми или серебряно-графитовыми. При этом зона нечувствительности ОА сокращается. Для уменьшения пульсаций напряжения U выход ТХГ подключают к сглаживающему RC-фильтру.
Семейство внешних характеристик тахогенератора показано на рис. 5.1. Нелинейность характеристик при Rн ≠ ∞ объясняется влиянием реакции якоря на поток Ф, которое возрастает при больших значениях Iя, связанных с увеличением частоты вращения n и, следовательно, напряжения U. Для уменьшения этой погрешности ТХГ его нагружают на схемы с большим входным сопротивлением, например, на эмиттерный повторитель. Для минимизации другой погрешности ТХГ, связанной с падением напряжения на щётках, последние выполняют медно-графитовыми или серебряно-графитовыми. При этом зона нечувствительности ОА сокращается. Для уменьшения пульсаций напряжения U выход ТХГ подключают к сглаживающему RC-фильтру.
|
|
|
5.2. Сельсины – устройства для передачи на расстояние угловых перемещений
В схемах автоматического регулирования, а также следящих системах широкое применение получили индукционные системы синхронной связи, под которыми понимают совокупность устройств, служащих для измерения и передачи на расстояние угловых перемещений двух или нескольких валов, механически не связанных между собой. Применяемые в индукционных системах в качестве датчиков и приёмников микромашины получили название сельсинов.
Обмотки сельсина датчика (СД) и сельсина приёмника (СП), соединённые между собой линиями связи, называют обмотками синхронизации, а обмотки, присоединяемые к общей для СД и СП сети переменного тока и предназначенные для создания магнитного потока машины, - обмотками возбуждения (ОВ).
Сельсины изготавливают трёх- и однофазными. Трёхфазные сельсины, применяемые при относительно больших мощностях, выполняют как обычные трёхфазные АД с фазным ротором.
У однофазных сельсинов ОВ однофазные. Обмотки синхронизации выполнены трёхфазными, сдвинуты в пространстве на 120 град. и соединены в звезду. Токи, протекающие по фазовым обмоткам, имеют одну и ту же временную фазу, но разные мгновенные и амплитудные значения. Основным видом однофазного сельсина считают микромашину, имеющую сосредоточенную обмотку возбуждения ОВ на статоре и распределенную (трёхфазную) обмотку синхронизации на роторе. Обмотки роторов СД и СП соединяются с линиями связи через три скользящих контакта, ток через которые проходит только при наличии угла рассогласования в положениях роторов СД и СП. Для уменьшения переходного сопротивления контактов кольца и щётки выполняют из сплавов серебра. Сельсины могут работать в одном из двух режимов:
– индикаторном (рис. 5.2);
– трансформаторном (рис. 5.3).
В индикаторном режиме СП, имеющий незначительный момент сопротивления, самостоятельно отрабатывает угол, задаваемый СД, не требуя дополнительных усилительных устройств. Действующие значения ЭДС, наводимые потоком ОВ в обмотках ротора, являются синусоидальными функциями угла поворота ротора a и для СД имеют вид:
 (5.3)
(5.3)
где Еm – максимальное действующее напряжение.
Для СП одноимённые ЭДС определяются так:
 (5.4)
(5.4)
Так как одинаковые обмотки синхронизации СД и СП включены встречно, то между одноимёнными концами обмоток действуют разностные ЭДС:
Рис. 5.2
 (5.5)
(5.5)
где  - угол рассогласования роторов СП и СД.
- угол рассогласования роторов СП и СД.
Под действием разностных ЭДС в линиях связи начнут протекать токи. Взаимодействие результирующей МДС ротора СП с полем обмотки ОВП создаёт статический синхронизирующий момент  , который стремится свести к нулю угол рассогласования q,
, который стремится свести к нулю угол рассогласования q,
 , (5.6)
, (5.6)
где  - синхронизирующий момент при q= =90°.
- синхронизирующий момент при q= =90°.
Помимо статического (когда угловая скорость вала СД w = 0) сельсины могут работать в динамическом режиме как при равномерном (w = const), так и неравномерном (w = var) вращении их валов. Поэтому представляет интерес динамический момент:
 (5.7)
(5.7)
Из последнего выражения следует, что с увеличением частоты  питающей сети возрастает динамический момент и, следовательно, уменьшается угол рассогласования.
питающей сети возрастает динамический момент и, следовательно, уменьшается угол рассогласования.
После остановки ротора СД обнаруживается неточность остановки ротора СП из-за трения в подшипниках и щётках, магнитной асимметрии, асимметрии обмоток и других причин. Погрешность передачи угла поворота определяется углом рассогласования при неподвижном роторе СД.
Рассмотренная индикаторная передача обратима, т.е. при повороте ротора СП освобождённый ротор СД будет поворачиваться на такой же угол.
По точности отработки угла сельсины делятся на три класса (табл. 1).
Таблица 1
Классы точности сельсинов
| Тип Сельсина | Класс точности | ||
| Погрешность измерения, град | |||
| СД | 0…± 0,25 | ±0,25…±0,5 | ±0,5…±1 |
| СП | 0…± 0,75 | ±0,75…±1,5 | ±1,5…±2,5 |
В трансформаторном режиме работы сельсинов напряжение подаётся только на статор СД, а ротор СП “заторможен” большим моментом нагрузки. Как и в индикаторном режиме, ток ОВ создаёт магнитный поток, который наводит в обмотках ротора СД три ЭДС. Они вызывают в линиях связи (ЛС) три тока, создающие потоки в роторе СП. Результирующий магнитный поток ротора СП создаёт в обмотке ОВ статора СП ЭДС, которую измеряют вольтметром и подают на вход усилителя У. При повороте ротора СД изменяются наводимые в его обмотках ЭДС, а значит токи в линиях связи и магнитные потоки обмоток ротора СП. Вследствие этого изменяется напряжение на обмотке статора СП. Таким образом, по показанию вольтметра можно судить о положении ротора СД относительно ротора СП.
Действительно, выходное напряжение СП, снимаемое с обмотки возбуждения ОВП, поступая через усилитель У на обмотку управления ОУ исполнительного двигателя ИД (рис. 5.3), заставляет его вращаться вместе с механизмом нагрузки и ротором СП до тех пор, пока напряжение на обмотке ОВП не станет равным нулю, что произойдёт при aП=aД.
Рис. 5.3
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 842; Нарушение авторских прав?; Мы поможем в написании вашей работы!