КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Радиолокационные системы
|
|
|
|
Сотовая телефонная радиосвязь
Сотовая телефонная радиосвязь получила широкое распространение благодаря потребности людей в общении в любое время суток и находясь в любом месте. Особенностью сотовой связи является небольшие мощности передачи сотового телефона. Он может поддерживать связь только на расстоянии 10-15 км (в зависимости от условий распространения). Поэтому создается сеть приемо-передающих ретрансляторных станций, являющихся одновременно и коммутирующими станциями. Коммутирующие устройства, по заданному абонентом набору номера телефона, определяют сотовую станцию, находящуюся в зоне обслуживания второго абонента, осуществляют соединение и поддерживают связь абонентов.
Для обеспечения переговоров многих абонентов необходимо много частотных каналов и они должны быть плотно расположены. По этому радиотелефоны работают на частотах УКВ-диапазона. Многоканальная передача информации между коммутирующими станциями идет в режиме временного уплотнения каналов с применением импульсно-кодовой модуляции.
Глава 9
Радиолокационные системы (РЛС) относятся к радиотехническим системам извлечения информации. Они служат для обнаружения объектов в пространстве, измерения их координат и параметров движения с помощью радиотехнических средств.
Первые РЛС разработаны в 1934-36 г. В 1939 созданы первые серийные РЛС для ПВО. 1940-41 г. под руководством Кобзарева Ю. Б. создана импульсная РЛС, позволяющая определять дальность и координаты цели. В 1942-45 г были разработаны комплексы управления зенитным огнём. В 1950- 60 г. были созданы зенитные системы автоматического наведения на ракеты на цель. В 1970-80 созданы системы автоматической стыковки космических аппаратов, а в 90-х годах - система автоматической посадки космического корабля «Буран».
|
|
|
9.1. Принципы работы РЛС и определения параметров объектов
Принцип определения координат с помощью импульсной РЛС показан на рисунке 9.1. РЛС периодически посылает, через перемещающуюся (сканирующую) параболическую (узко направленную) антенну, зондирующие импульсы в пространство.
Если антенна направлена на объект (цель), то на входе приемника, подключаемого к антенне в промежутке между зондирующими импульсами, появляется отраженный сигнал.
Дальность до цели определяется по формуле:
D = c t з / 2, (9.1)
где с - скорость света в атмосфере = 298000 км/с, t з - время прохождения импульса до цели и обратно (время задержки отраженного импульса относительно зондирующего).
Использование антенны с узко направленным лучом позволят определить азимут a (угол направления на цель в горизонтальной плоскости относительно направления меридиана на север) и угол места b (угол направления на цель относительно горизонта).
Высота цели определяется по формуле: H=D sin b (рис.9.1).
Координаты цели на горизонтальной поверхности земли определяются по формулам: Х = D cos b sin a; Y = D cos b cos a.
Задачи, выполняемые РЛС:
1. Определение координат D, H, X, Y, Z.
2. Определение параметров скорости V.
3. Распознавание цели по сигналам ответчика («свой- чужой») и по габаритам (идентификация).
Обычно РЛС входит в более сложные системы, такие как: управления зенитным огнем, наведения ракеты на цель, управления движением в аэропорту и т.п.
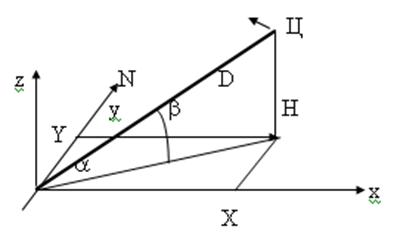
Рис. 9.1. Параметры определения координат цели
(D - дальность, H - высота цели, a- азимут, b - угол места,
N - направление меридиана на север)
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1226; Нарушение авторских прав?; Мы поможем в написании вашей работы!