КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Режимы работы
|
|
|
|
Конструкция
1 ШД с постоянными магнитема
Положение фиксации – в конце такта магнит ротора занимает положение (фиксированное) с минимальным магнитным сопротивлением
Для уменьшения шага необходимо увеличить число полюсов ротора
α = 2π/(Zn×n)
Zn – число полюсов
Обычно Zn = 4-6 увеличение ограничено диаметром ротора и технологией изготовления, а так же увеличением ротора рассеяния между полюсами
Zn = 4-6- шиг – несколько десятков градусов
Почт. Магниты - сильные – дорогие; ферриты – слабые
2 Реактивные ШД – Р – основной применяемый тип
Статор – зубцы с обмотками на них попарно соединенных
Ротор – зубцы (число их меньше, чем у стартора)
Сердечники – шихтованные, из магнитомягкого материала с высокой магнитной проницаемостью
1.Статический
При f=0 – прохождение постоянного тока по ОВ, создающим неподвижное магнитное поле.
2.Стартстоповый
Отработка ед. шагов. Частота вх. Импульсов такова, что переходный процесс, вызванный подачей импульса заканчивается к моменту подачи следующего импульса. Ротор перемещается на один угловой шаг и успевает затормозиться. Этот процесс сопровождается электромагнитным переходным процессом в обмотках ШД и эл. мех. Переходный процесс вследствие воздействия электромагнитного момента на ротор ШД движение ротора в конце шага – свободные колебания относительно положения устойчивого равновесия. Кинетическая энергия ротора расходуется на электромагнитные и электромеханические потери.
3.Установившийся режим
При постоянной частоте упр. импульсов f
Время такта коммутации Tком>tп.п.; при этом скорость 
Управление ШД
Характеристики ШЕП(ШД) определяются системой нелинейных дифференциальных уравнений эл. равновесия по числу обмоток ШД и управлением моментов (без учета демфирования)
|
|
|
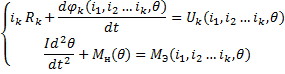
 - момент нагрузки
- момент нагрузки
 - электромагнитный момент (зависит от
- электромагнитный момент (зависит от  и
и  )
)
 – момент инерции привода
– момент инерции привода
 - напряжение на обмотках
- напряжение на обмотках
 - потокосцепление (2 витка)
- потокосцепление (2 витка)
Исследование уравнений (сложное) позволяет определить условия устойчивой работы ШД
- Наличие внешнего демпфера
- Наличие режима холостого хода
- Увеличения числа тактов коммутации
Привод устойчив если:


 - коэффициент вязкотрения,
- коэффициент вязкотрения,  - круговая частота собственных колебаний
- круговая частота собственных колебаний
Переходные режимы (пуск, торможение, реверс, переход на другую частоту) полностью описывается системой уравнений
Статический режим (устойчивый) определяется угловой статической характеристикой – зависимость  (статический синхронизирующий момент от угла рассогласования между полем статора и ротора)
(статический синхронизирующий момент от угла рассогласования между полем статора и ротора)
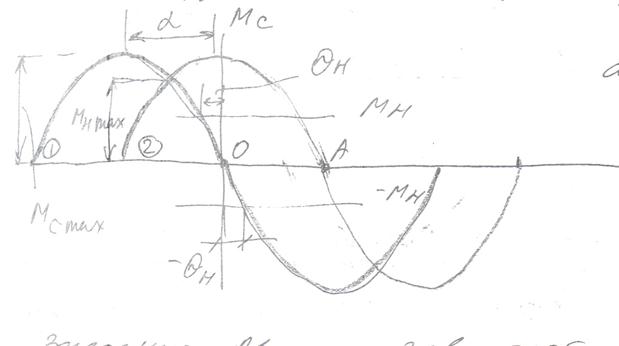
Значение  зависит от геометрии магнитной системы и типа ШД, числа пар полюсов ротора числа возбужденных фаз
зависит от геометрии магнитной системы и типа ШД, числа пар полюсов ротора числа возбужденных фаз

 – угол поворота поля статора при коммутации фаз
– угол поворота поля статора при коммутации фаз
- угол отставания ротора от поля статора в результате действия нагрузки
Для обеспечения перегрузки и устойчивого движения

Функциональная схема
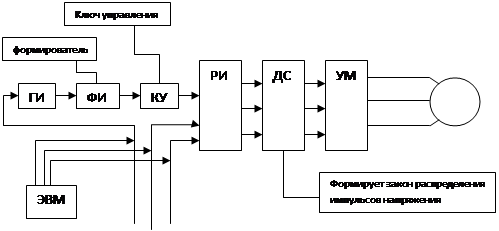
Управление – изменение U и f(y) частотно-регулируемых ЭП
Много дискретных элементов – цифровые системы ЭВМ, МП
Применяются статические преобразователи частоты с отличным от (U/f) принципом управления
ШЕП – управление частотно-модулированной последовательностью импульсов в которых f = сред. W, число импульсов – углу поворота ротора.
Список литературы
- Карнаухов Н.Ф. Электромеханические и мехатронные системы: Учебное пособие для вузов. Ростов н/д, Феникс, 2006, 320с.
- Терехов В.М., Осипов О.И. Системы управления электроприводов. 2005
- ЭТС-4 под редакцией Герасимова, 2002
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л. ЭАИ, 1982г. 392с
- Сафонов Ю.М. Электроприводы промышленных роботов. М. ЭАИ, 1990, 176с
- Исии Т. Симояма И. Иноуэ X. Мехатроника. М. МИР, 1988, 318с
- Подураев Ю.В. Мехатроника. Основы, методы, применение. М. Машиностроение, 2006, 256с
- Журнал «Мехатроника. Автоматизация. Управление.»
- Егоров О.Д. Подураев Ю.В. Конструирование мехатронных модулей. М. МГТУ Станкин, 2004, 360с
|
|
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 230; Нарушение авторских прав?; Мы поможем в написании вашей работы!