КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Формула Аккермана
|
|
|
|
Если исходное уравнение состояния объекта отличается от управляемой канонической формы, то в случае управляемости объекта для определения вектора обратной связи по состоянию используют следующую трехэтапную процедуру.
1. Преобразуют исходную модель объекта в управляемую каноническую форму, используя матрицу преобразования
 . (*)
. (*)
2. Находят вектор  обратной связи по преобразованному состоянию
обратной связи по преобразованному состоянию  , применяя (18).
, применяя (18).
3. Преобразуют вектор в вектор обратной связи по исходному состоянию  . используя
. используя
 . (19)
. (19)
Формула Аккермана объединяет эти шаги в одну формулу
 , (20)
, (20)
где матричный многочлен  составлен с помощью коэффициентов характеристического уравнения желаемой системы.
составлен с помощью коэффициентов характеристического уравнения желаемой системы.
Пример. Пусть объект описывается уравнением состояния
 ,
,
а желаемый характеристический многочлен имеет вид  .
.
Так как
 ,
,
то передаточная функция объекта имеет вид  , т.е. объект представляет собой двойной интегратор. Отсюда,
, т.е. объект представляет собой двойной интегратор. Отсюда,  . Следовательно, n= 2,
. Следовательно, n= 2,  и матрица управляемости
и матрица управляемости
 .
.
В соответствии с (**)  обратная матрица
обратная матрица
 .
.
Легко показать, что
 ,
,  ,
,
так что согласно (*)
 .
.
Используя (18)  ,
,  ,…,
,…, , находим
, находим
 ,
,  .
.
Согласно (19)
 ,
,
что совпадает с выражением, полученным ранее другим путем.
Команда MATLAB: acker (A,B, Рр).
Пример. Пусть в условиях предыдущего примера коэффициенты  ,
,  , так что полюсы желаемой системы
, так что полюсы желаемой системы  , k = 1. Тогда применяя команду
, k = 1. Тогда применяя команду
l = acker(A,B, [-4+j*4 -4-j*4]),
можно найти  .
.
Сделаем несколько замечаний, касающихся рассмотренного метода размещения полюсов.
1. Матрица T может быть найдена только в том случае, когда существует обратная матрица управляемости  . Следовательно, любое расположение полюсов проектируемой системы с помощью обратной связи по состоянию можно обеспечить, если объект управления полностью управляем, т.е. если матрица управляемости объекта
. Следовательно, любое расположение полюсов проектируемой системы с помощью обратной связи по состоянию можно обеспечить, если объект управления полностью управляем, т.е. если матрица управляемости объекта  является невырожденной, так что
является невырожденной, так что  .
.
|
|
|
2. Спроектированная в соответствии с формулами (7), (18) и (19) система не удовлетворяет условию астатизма, т.е. ее передаточная функция

не равна единице при p =0, другими словами, спроектированная система является статической. Здесь K (p) числитель ПФ объекта.
Если выбрать закон управления в виде
 ,
,
то передаточная функция проектируемой системы
 .
.
Так как  , то, как видим, введение наряду с обратной связью по состоянию прямой связи по задающему воздействию
, то, как видим, введение наряду с обратной связью по состоянию прямой связи по задающему воздействию
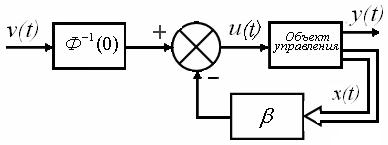
Рис.3
(рис. 3) обеспечивает астатизм проектируемой системы.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 4725; Нарушение авторских прав?; Мы поможем в написании вашей работы!