КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
По управляющему воздействию (задающее воздействие)
|
|
|
|
В зависимости от характера изменения задающего воздействия во времени автоматические системы управления разделяются на три класса: стабилизирующие, программные и следящие системы.
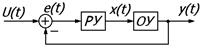 а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:
а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:

Стабилизирующие системы самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов.
б) Алгоритм функционирования программной автоматической системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени f(t):
 .
.
в) Следящая автоматическая система управления предназначена для изменения управляемой величины в соответствии с изменениями другой величины, которая действует на входе системы и закон изменения которой заранее не известен:
,
но f(t) заранее не известна.
Следящие системы используют обычно для дистанционного управления перемещением объектов в пространстве. Управляемой величиной в этом случае является либо расстояние (перемещаемого объекта) от какой-либо начальной точки, либо угол поворота (вращаемого объекта), отсчитываемый от начального положения. Следящие системы применяют также для дистанционной передачи показаний.
г) Самонастраивающиеся системы (адаптивные или экстремальные) U(t)=extr(Ui(t)), входной сигнал U(t) выбирается наилучшим из множества сигналов в соответствии с целью управления.
Наиболее часто принцип автоматического поиска применяют для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины. Такие системы поиска называют экстремальными системами.
|
|
|
3. Свойства в установившемся режиме.
а) Статические системы - это такие системы, в которых при заданном воздействии, которое стремится к постоянному, отклонение управляющей величины также стремится к постоянной величине, отличной от нуля.
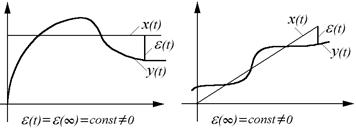
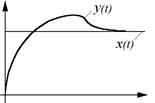
б) Астатические системы - это такие системы, в которых отклонение управляющей величины при любом постоянном задающем воздействии стремится к нулю.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 338; Нарушение авторских прав?; Мы поможем в написании вашей работы!