КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системи регулювання з додатковим імпульсом за похідною з проміжної точки
|
|
|
|
Такі системи регулювання використовують тоді, коли об’єкт має регульований технологічний параметр, розподілений за просторовою координатою (наприклад, апарати колонного типу, трубчасті реактори, кожухотрубні теплообмінники з великою довжиною та ін.). Особливість таких об’єктів полягає в тому, що основною регульованою координатою є технологічний параметр на виході з апарата, збурення розподілені за довжиною апарата, а регулюючий вплив подається на його вхід. При цьому одноконтурні замкнені системи регулювання не забезпечують необхідної якості перехідних процесів через велику інерційність каналу регулювання.
Подавання на вхід регулятора додаткового імпульсу з проміжної точки апарата дає випереджаючий сигнал і регулятор включається в роботу раніше, ніж вихідна координата відхилиться від заданого значення.
Для забезпечення регулювання без статичної похибки необхідно, щоб в усталених режимах додатковий імпульс зникав. Для цього допоміжний імпульс пропускають через реальну диференціальну ланку з передаточною функцією.
Wд (s)= Кд , /4.14/
, /4.14/
 де Кд- коефіцієнт передачі;
де Кд- коефіцієнт передачі;  ,
,  - сталі часу.
- сталі часу.
Ефективність уведення додаткового імпульсу залежить від точки його вибору, яку визначають у кожному конкретному випадку динамічними властивостями об’єкта та умовами його роботи.
Розрахунок подібних систем регулювання аналогічний розрахунку каскадних АСР.
На рис. 4.5. допоміжну формує ланцюжок, який складається з вимірювального перетворювача ВП1 проміжної координати  , проміжного перетворювача ПП1 та реальної диференцюючої ланки D. Вихідний сигнал диференціатора надходить на вхід регулятора R. Цей зворотний зв’язок є гнучким і працює лише в перехідних режимах роботи.
, проміжного перетворювача ПП1 та реальної диференцюючої ланки D. Вихідний сигнал диференціатора надходить на вхід регулятора R. Цей зворотний зв’язок є гнучким і працює лише в перехідних режимах роботи.
|
|
|
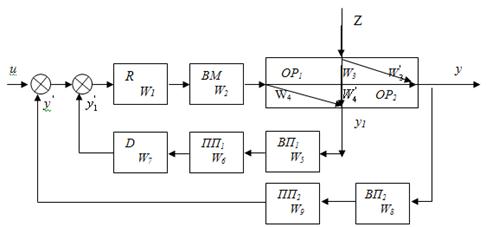
Рис. 4.5. Структурна схема АСР із допоміжною похідною
Як правило, такі АСР досліджуються по каналу збурення, розподіленого за просторовою координатою. Збурення Z діє як на вихідну координату об’єкта у, так і на проміжку у 1. Завдяки тому, що технологічний параметр розподілений за лінійною координатою, дія збурення Z на проміжну координату у 1 відбудеться швидше, ніж на координату у. Тому регулятор R почне працювати з моменту появи сигналу у1 і значно швидше, ніж зміниться сигнал у.
Структурна АСР із допоміжною похідною подібна каскадній, тобто має два контури: внутрішній і зовнішній. Передаточна функція для внутрішнього контура по каналу регулювання (при зміні завдання регулятора u) має вигляд:
 , /4.15/
, /4.15/
а по каналу збурення  :
:
 /4.16/
/4.16/
Передаточна функція АСР по каналу регулювання  :
:
 /4.17/
/4.17/
а по каналу збурення  :
:
 /4.18/
/4.18/
Із рівнянь /4.15-4.18/ випливає, що передаточна функція диференціатора залежить віл параметрів регулятора. Із характеристичного рівняння для внутрішнього контура маємо:
 /4.19/
/4.19/
У /4.19/ введемо позначення еквівалентного об’єкта:
 , /4.20/
, /4.20/
Якщо регулятор грунтується на ПІ-законі регулювання, то рівняння /4.19/ з урахуванням /4.14/набирає вигляду
 /4.21/
/4.21/
Із рівняння /4.21/ слідує, що в разі використання ПІ (або ПІД) регулятора з достатньою точністю можна вважати, що параметри диференціатора будуть близькими до параметрів регулятора, тобто  , а
, а  .
.
Розрахунок АСР із додатковим імпульсом за похідною зводиться до такого:
- визначають настроювальні параметри регулятора замкненої одноконтурної системи регулювання без внутрішнього контура;
- використовуючи рівняння /4.21/знаходять параметри диференціатора;
- розраховують перехідний процес АСР і визначають його якість;
- якщо якість не відповідає необхідним вимогам, то потрібно змінити параметри диференціатора.
|
|
|
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 623; Нарушение авторских прав?; Мы поможем в написании вашей работы!