КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Mechanisms
|
|
|
|
STATIC CHARACTERISTICS OF EXECUTIVE MECHANISMS AND ELECTRIC MOTORS
Considering operation of electric motor that actuates executing mechanism the correspondence of static characteristics of motor with static characteristics of operating mechanism should be mentioned.
For example, for rotating electric drives the dependence between speed and resistance moment of mechanism that are reduced to the shaft of electric motor is called the mechanical characteristic of executive mechanism
Where ω-reduced to the motor shaft angular velocity of executive mechanism, [1/c];
Ms – reduced to the motor shaft static resistance moment of executive mechanism, [Nm].
Different executive mechanisms have different mechanical characteristics. All variety of executive mechanisms may be conventionally divided into four groups with approximately identical mechanical characteristics. For all this four mechanisms groups one total empiric dependence that corresponds to mechanical characteristic of mechanism may be written:
 , (3.1)
, (3.1)
Where M0 – moment of mechanism static resistance when overcome the friction in moving parts of mechanism, [Nm];
Msnom – static moment of mechanism resistance at nominal reduced angular velocity ωnom, [1/c];
j – power exponent that characterizes changes of resistance moment at changes of angular velocity.
Finally value of this exponent is those parameter, that significantly effects on the view of mechanical characteristic and determine the belonging of mechanism to those or another one group (class).
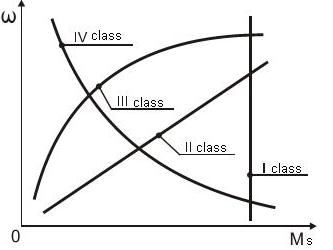
Figure 3.1 – Mechanical characteristics of executing mechanisms
I class. All mechanisms in which static resistance moment doesn’t depend of speed value belong to this class. Mechanical characteristic of such mechanisms has a view of parallel to axis of ordinate straight line.
In correspondence with equation (3.1) power exponent j doesn’t have an influence on the resistance moment. j=0. With this value of j equation (3.1) will have the view
that is mathematically this is line parallel to axis of ordinates that deviates from this axis on the distance Msnom.
These mechanism have such characteristic (belong to I class):
- hoisting machines;
- cable hoist;
- Mechanisms of machines haulage;
- Executing parts of most part of robots, etc.
Also production lines with constant mass of material that travels and most of mechanisms (with definite approximation measure) in which friction is the prior resistance moment because in normal range of operating speeds friction changes slightly, may be related to the first class. (Friction moment increases significantly at speeds that are significantly exceed speed of ordinary mechanisms. And at the cosmic speeds and speeds close to cosmic, friction becomes the prior factor of resistance rise.
II class. To the second class belong all mechanisms in which static resistance moment increases with the increasing of linear speed, so called linearly increasing mechanical characteristic and it has a view of inclined line. According to equation (3.1) power exponent j, influence of speed on the resistance moment is one.
|
|
|
j=1.
At that value of j equation (3.1) will have a view
 ,
,
 , (3.2)
, (3.2)
Where M’s=  - constant value.
- constant value.
Id est the equation (3.1) takes on view of equation (3.2) which is classical view of the straight line equation, that doesn’t pass the point of origin: (y=kx+b). For simplification in most cases M0 can be neglected, especially at low speeds, then this characteristic will pass the point of origin and equation (3.2) will have the view y=kx, that is equation of a straight line that passes the point of origin.
There are only few mechanisms with such characteristic. And the classical example of mechanism with such characteristic is DC generator with independent excitation, which operates upon constant external resistance.
III class. To the third class belong all mechanisms in which static resistance moment increases nonlinearly at increasing of speed. I.e. mechanical characteristic is nonlinearly increasing. According equation (3.1)
j=1.8-2.2,
And in particular cases
j=3-4.
With these values of j equation (3.1) will have the view
 ,
,
 , (3.3)
, (3.3)
Where  is the same constant value.
is the same constant value.
That is equation (3.3) in mathematical view takes a parabola character. And for example when the friction moment is neglected (M0=0) and exponent j=2, equation takes on the view of simple parabola (y=kx2 ).
Fan is the classical example of operating mechanism with such characteristic. For these reasons mechanisms of III class are called the mechanisms with fan characteristics. Its outstanding property is that at low speeds the load is small and with the acceleration the resistance increases. I.e. it is physically impossible to start them up under the load (starting under idle rate).
Except fans to the III class belong such mechanisms:
- Aligned pumps;
- Compressors;
- Screw propellers of aircrafts and water transport;
- Centrifuges;
- Separators;
- Gyroscopes and so on.
For super-high-speed mechanisms, for example centrifuges, in which speed of rotation achieves 100000 rot/min j coefficients may amount to 4.
The Nonlinear increasing of resistance moment at increasing of speed of such mechanisms when designing of high speed mechanisms that moves in dense medium (with high viscosity), for example in water relatively to air, is destructive. If mechanism moves in the medium with different viscosity (surface mechanisms, medium is water and air) than for decreasing of power exponent j (decreasing of dependence between resistance moment and speed) the hydrofoils that allows to create super-high-speed above water moving mechanisms, are used.
IV class. To this class belong all elements in which static resistance moment decrease nonlinearly when speed increase, i.e. mechanical characteristic is nonlinearly decreasing. According to equation (3.1) power exponent j of influence of speed on the resistance moment is a number that is less than zero, in most cases j=-1.
With these values of j equation (3.1) will have the view
 ,
,
 , (3.4)
, (3.4)
Where  is the same constant value.
is the same constant value.
That is mathematical view of equation (3.4) is the equation of inversely proportional dependence. And for example when M0 is neglected the equation takes on the view y=  - view of simple symmetrical hyperbola.
- view of simple symmetrical hyperbola.
|
|
|
Classic example of mechanisms of IV class (with inversely-proportional mechanical characteristic) are the mechanisms of central motion of cutting working lathe (milling machine, etc.). Here the higher the mechanism speed, the lower supplying should be – the less resistance moment (finishing) and vice versa, the lower mechanism speed will be, the higher resistance moment should be – greater supplying (roughing, peeling). Also metallurgical reels and other equipment have analogical characteristics.
For respective value of power exponent j of four classes of machinery according equation (3.1) the case history presented in the next table may be obtained.
Table 3.1 – Qualitive characteristic of manufacturing mechanism classes.
| Class of manufacturing mechanism | Degree index in equation (3.1) | Equation (3.1) transformations | Analytic expression of equation (3.1) (canonical) | Name of relationship |
| Class 1 | 
| 
| 
| Straight line parallel to ordinate axis |
| Class 2 | 
| 
| 
| Inclined straight line |
| Class 3 | 
| 
| 
| Parabola |
| Class 4 | 
| 
| 
| Inverse propotional relationship |
It should be mentioned that in real conditions real mechanisms have a number of features for the reason of which it is difficult in whole refer it to one of the four mentioned classes. That’s why division into such classes in certain manner is conventional.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 432; Нарушение авторских прав?; Мы поможем в написании вашей работы!