КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Electrodynamic braking mode. Counter switching braking mode
 |
Counter switching braking mode
At this mode motor rotates at the expense of stored kinetic energy or potential forces of executive mechanism in the direction, opposing to the action of the moment, made by the motor, (i. e. motor windings powered to rotate into one direction, but at the expense of accumulated kinetic or potential energy, acting from executive mechanism on motor shaft, the motor rotates in opposite direction).
Such mode can occur in load-lifting mechanism, when electric motor powered on lift of the load and the moment, made by load, causes the motor to rotate in the direction of load-lowering. The same mode is occurring at switching of electric motor windings and at its rotation on reverse (from start of switching to full stopping).
Generally, from examples, mentioned above, it should be distinguished two cases of counter switching brake realization:
- at accumulation of potential energy (with active static moment);
- at accumulation of kinetic energy (with reactive static moment);
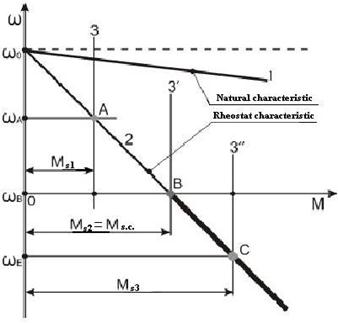
The 1st case. Graphic representation of static mechanical characteristic, for example, so called braking load lowering is shown on the figure. Mechanical characteristic for counter switching braking mode is a continuation of the motor mode characteristic into the fourth quadrant.
At powering of motor windings for load lifting the motor can be activated only, when
 (3.17)
(3.17)
where Ms – is a static moment of load resistance, and condition (3.17) will exist, when  (point A on the figure);
(point A on the figure);
 - is the motor moment at the beginning of starting, still at stationary armature, that is short-circuited moment (point B on the figure).
- is the motor moment at the beginning of starting, still at stationary armature, that is short-circuited moment (point B on the figure).
If the moment of load resistance at the starting is Ms1, then after motor starting its speed will increase to the speed value ωA, that is to the steady-state speed in point A, and the current of the motor is defined by the next formula:
 (3.18)
(3.18)
If load mass during lifting will be increased (that is shift to the right executive mechanism characteristic 3 (see the figure)), so the motor speed will slow by characteristic area AB, the speed of load lifting will decrease, if the load before making of resistive moment Ms1 will be increased (mechanism characteristic 3′), that will be equal to the starting moment

and the motor will stop, the speed of load lifting is  .
.
For this speed equation (3.18) has the next view:
If the load mass will be increased more and more, then load moment will be more than moment of motor starting and under the influence of resistive moment excess the motor will start to rotate in opposite direction, the load will start to slow by characteristic area BC, and lowering speed will start to increase. If the load will be constant, for example such, that make the load moment Ms3 (mechanism characteristic 3′′), so increasing of lowering-load speed will continue to the point C, after which the load lowering will continue with constant speed ωc.
|
|
|
Thus, the motor at this condition will rotate in opposite direction, magnetic flux of the motor preserved its direction, and it means, that emf direction of the motor will change into the opposite one, and the current of the motor respectively will be:

the value of which, as it shown on the equation above, will be more, than in motor mode.
The moment of DC motor with independent excitation in braking mode, comparatively with motor mode, will increase as well as the current.
Considered above ED operation process of load-lifting mechanism can be presented as a table, showing three operation modes of ED (in correspondence of three characteristic points: A, B, C).
| Point А | Point В | Point С |

|
|
|

| 
| 
|
| Motor mode | Stationary motor | Counter switching braking mode |
As it shown in the table, during counter switching brake machine emf is directed in series-according with supply voltage, i. e. the motor operates as a generator in series with the main, receiving mechanical energy of the shaft from executive mechanism and transforming it into electrical one. Also electrical energy is consuming from the main. Electrical energy, generated by machine, and electrical energy, consumed from the main are released as the heat on resistances of armature circuit, speaking figuratively, warming machine and environment in vain.
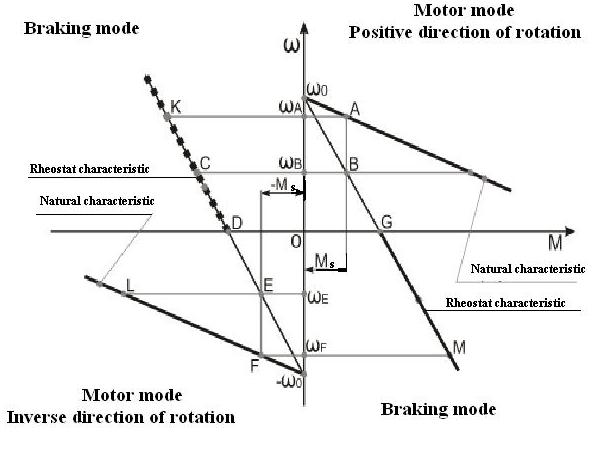
The 2nd case. Counter switching brake due to mechanical energy, accumulated by mechanism, is widely used significantly frequent. Such braking exists by change of polarity of motor armature circuit at its rotation on opposite polarity. At this, as in the 1st case, emf is directed according with supply voltage, and motor moment is directed opposite to armature rotation. Mechanical characteristic of 2nd case of counter switching brake has the next view.
Let`s assume, that before change of polarity motor operated on natural characteristic with set speed ωA with resistive moment Ms in motor mode of set (positive) direction of rotation – i. e. in the first quadrant.
To make counter switching mode at reactive static moment of resistance it should to:
a) connect additional resistance Raa in armature circuit for decreasing of braking current; motor speed will be slow and motor will pass from natural characteristic (point A) on rheostat characteristic (in the point B), if value of resistive moment Ms will not change;
b) to change the polarity of armature circuit at the motor speed ωB into opposite one, if at this value of additional resistance Raa of armature circuit will not change, then motor operation will pass into the point C moreover KE will be parallel to BM;
c) by influence of motor braking moment will be compensated accumulated kinetic energy and the speed will decrease by rheostat characteristic to the point D, in which accumulated kinetic energy will be liquidated completely, and motor speed will be equal to zero (motor will stop);
d) on this step (point D) braking process is finished, but on motor armature moment of the motor is continue to act and from the reason, that the motor under action of this moment will not start to rotate in opposite direction (third quadrant), the motor is switching off the main. So, brake is existed;
e) if in the point D the motor will not be switched off the main, then it will start to rotate in opposite direction on motor mode of inverse rotation by characteristic KE;
|
|
|
f) if at this change of the value of static resistive moment Ms didn`t occur, decreasing of motor rotation speed in inverse direction will be realized to the point E and then motor will rotate with constant speed ωE;
g) if you will pass into natural characteristic it is follow to disconnect an additional armature circuit resistance Raa – motor will increase its speed and pass to operate into the point F on natural characteristic with constant speed ωF;
Remark. Brake can be started directly from natural characteristic, and for this:
a) at operation in motor mode of previous (positive) direction on natural
characteristic in the point A with the speed ωA to realize changing of supply voltage polarity of armature circuit into opposite one;
b) it is needed to connect an additional resistance Raa and motor with the
speed ωA will pass into operation in braking mode (2nd quadrant) into the point K, as opposed to previous brake (at the speed ωB) motor current and moment will be greater;
c) at influence of braking moment of the motor accumulated kinetic energy
will be compensated and the speed will start to decrease by rheostat characteristic from the point K to the point C;
d) further braking process will not be differed from the previous mode (start
of braking with the speed ωB).
From considered above it is seen, that at reverse of DC motor with independent excitation by changing of supply voltage polarity of armature circuit in any case counter switching brake with static reactive moment is present automatically.
If supply voltage polarity of armature circuit will be changed once again, then, as previously was mentioned, motor again will pass into counter switching braking mode by the direction FMGBA and will reach of motor operation mode with positive direction of rotation – the 1st quadrant.
All these varieties of switching braking mode, comparatively with another types of electric brake have such advantages:
- wide application range of such braking mode, as it can be realized almost
in any operation (real) case of electric drive;
- high brake efficiency, because at this occur substantial currents and
moments (not only greater, than in motor mode, but also greater than correspondent parameters of starting mode), which allows to apply such brake in emergent situations at high speed – braking by reverse by natural mechanical characteristic (at absence of additional resistance Raa).
Disadvantages:
- counter switching brake energy-wise is extremely uneconomical, because
braking is realized by consumption from the main substantial current;
- greater braking current and moment result to substantial overheating of
motor windings and to mechanical shocks in mechanical part of electric drive, and at braking by reverse by given characteristic (emergent brake) result to inevitable crushing of the drive (its mechanical part, and concerning the drive – fault of insulation and ring fire).
Thereby, for current and moment limiting in counter switching braking mode is obligatory such braking condition – connection of additional resistances to armature circuit of the motor at braking.
For simplification we will call this mode as dynamic braking.
In dynamic braking mode the motor is applied as DC generator with independent excitation closed on independent load in view of external resistance Rdb on the scheme
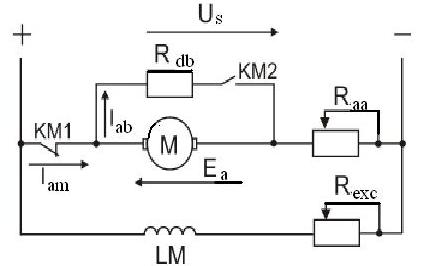
KM1 – is closed; KM2 – is opened – motor mode
KM1 – is opened; KM2 – is closed – braking mode
That is dynamic braking occurs, if armature circuit to disconnect from the main and close it on resistor Rdb. Excitation winding LM remains on supplying both in motor mode and in braking one. In this case machine operates as a generator due to accumulated potential energy of the load. In both cases generated electric energy is consumed by heating of armature windings and braking resistor Rdb (therefore dynamic braking also is called resistor braking).
|
|
|
In the scheme, mentioned above, there are such reference designations:
KM1 – is a linear contactor for switching on armature circuit of the motor;
KM2 – is a contactor of dynamic braking;
Iam – is an armature current in motor mode of the motor;
Iab – is an armature current in braking mode of the motor;
Ea – is an emf of motor armature;
LM – is independent excitation winding of the motor;
Raa – is additional resistance in armature circuit of the motor in motor mode;
Rexc – is additional resistance in excitation circuit.
Because of the reason, that armature emf at dynamic brake remain the sane sign, as in the motor mode, and voltage is not applied to the armature (Us=0), so, in accordance with equation (3.16), current direction of dynamic brake changes into opposite one comparatively with motor mode

at Us=0
 (3.19)
(3.19)
where  - is a total resistance of armature circuit at braking.
- is a total resistance of armature circuit at braking.
Because of the same reason (Us=0) mechanical characteristic will have another view in braking mode comparatively to motor one.
 ,
,
at 
 , (3.20)
, (3.20)
where  - is braking moment of the motor.
- is braking moment of the motor.
In accordance with assumptions, accepted above, equation (3.20) mathematically represents a line in the next view

that is a straight line, passing through coordinate origin from the 2nd to the 4th quadrant.
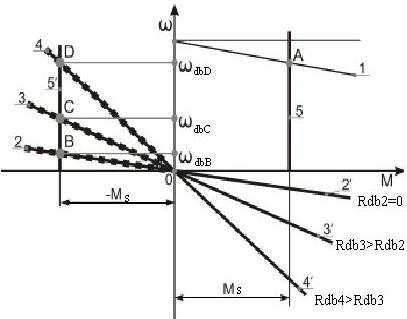
Characteristic stiffness (slope), as before, depends on resistance value of motor armature circuit. Braking at short-circuited armature circuit (Rdb) occurs the most intensively, and at this braking characteristic will be parallel to natural characteristic of the motor (line 2-2′|| 1) in motor mode.
Because of this circumstances armature current Rab will be correspondent to short-circuited current Ia s.c., i. e. too high, and for limiting of short-circuited current it is follow to realize braking at short-circuited armature circuit only at low speed values of armature, for example, in the point B. Braking realization in the point B occurs at braking lowering of load (in load-lifting mechanisms). In this case steady-state mode of load lowering will defined by intersection of static moment line (characteristic) 5′ with motor characteristic 2 (point B). For realization of dynamic braking at higher speed resistor of dynamic braking Rdb is connected (points C and D with correspondent resistors Rdb3 and Rdb4).
Advantages of dynamic braking:
- dynamic braking has wide range of application, as counter switching brake;
- although at dynamic braking recuperation of electric energy doesn`t occur, however such mode is economically sound, as there is no need in expenditures of electric energy from the main, motor generates it itself, that is more advantageous, than at counter switching brake; energy losses on excitation are low and they are present in all modes of electric braking;
- current loads at dynamic brake are lighter than at counter switching brake, dynamic loads on mechanical part of electric drive and shocks are lower;
- possibility of braking at voltage disconnection from armature circuit of the motor because of any reasons (especially it is important at emergent braking).
Disadvantage of such braking mode is presence of special electric scheme, providing switching of the motor from motor operation mode into braking one.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 484; Нарушение авторских прав?; Мы поможем в написании вашей работы!