КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Speed regulation is a forced change of speed value by means of using of special measures independently of value and character of operating load
|
|
|
|
There are two possibilities for regulation of actuation part speed:
- Change of electric drive speed;
- Change of kinematic circuit parameter of ED mechanical part.
First method is realized by the influence on electric motor, the second one – by the influence on mechanical part of ED.
Both capabilities are used nowadays, especially for deep-regulated ED. But it is necessary to mention that the better will be ED, the more “pluses” will have the first method, because the opened mechanical part of ED has a lot of considerable disadvantages, but modern state of technical progress doesn’t allow the elimination of mechanical part, especially in deep-regulated ED.
In historical development of ED the second method was the initial step at transition from unregulated ED to the regulated one. And in the present days the mechanical part has quite difficult, cumbersome, not reliable enough construction (gear-box, reduction gears, variators, etc). Besides, here the smooth speed regulation is difficult in obtaining. With this conditions the speed regulation directly from the ED energy source (electric motor) is widely used.
Let’s consider mentioned above regulation features in details.
4.1.1 Regulation accuracy
It defines by possible deviations of speed from its specified value under the influence of external factors, such as change of load during the regulation of speed, change of speed when regulating the moment, voltage oscillations when regulating, etc.
As an accuracy rating of speed regulation may serve a parameter that is the relationship between maximum speed deviation , and its average value ωav (
, and its average value ωav ( - relative error of regulation).
- relative error of regulation).
 ,
,
Where ωmax and ωmin – maximal and minimal values of speed at specified speed values respectively (see figure).
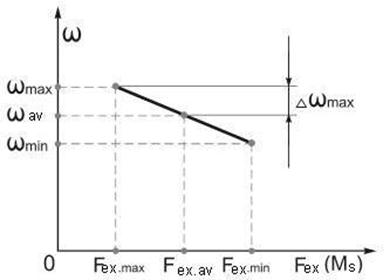
In such a way a quantitative assessment of method of speed regulation in relative units depends on the average speed value that is regulated and defines by the specific limits of change of external influence (from Fex.min up to Fex.max).
4.1.2 Range of speed regulation
Specified range of speed regulation characterizes the limit of changing of average speed values, possible at specified method of speed regulation
 .
.
The upper speed limit  is restricted by maximal tolerant or maximal possible speed value, for example for DC motors – it is the mechanical strength of commutator and beltline (i.e. armature), worsening of commutation, etc.
is restricted by maximal tolerant or maximal possible speed value, for example for DC motors – it is the mechanical strength of commutator and beltline (i.e. armature), worsening of commutation, etc.
The lower speed limit  is restricted by the required accuracy of specified speed maintaining at oscillation of external influence value (when oscillating the static resistance moment) at low speed.
is restricted by the required accuracy of specified speed maintaining at oscillation of external influence value (when oscillating the static resistance moment) at low speed.
The range of regulation is marked by the “capital D” letter and is written in the division by unity view, for example:
 ,
,  , than
, than

Such range of speed regulation (and wider) has metal-cutting lathes, with this the primary drive of the lathe has the range about 100:1.
Modern regulation systems allow the realization of wider range of regulation.
|
|
|
4.1.3 Smoothness of Speed Regulation
Smoothness of speed regulation characterizes the speed hop when transiting from the given speed to the next available one. The smaller the hop, the higher the smoothness.
The number of speeds obtained in given range is defined by the smoothness of regulation. It may be estimated by the regulation smoothness factor defined as the relation between two stable neighbor values of angular velocities when regulated

Where ωi, ωi-1 – angular velocities at the ith and (i-1) degrees of regulation.
The larger the number of realized regulation degrees Z, the higher the smoothness.
The lower the power in electric circuit in which change of parameter should be realized, the higher the possible smoothness.
The number of regulation degrees Z tends to infinity at smooth regulation

i.e. smoothness factor tends to unity

At step regulation the smoothness coefficient substantially differs from the unity, for example Ksm=2.
Smoothness of speed regulation appreciably depends on the motor type and construction of regulated device. Asynchronous multispeed motor has the worth smoothness, and DC motor of independent excitation with speed regulation by field weakening has high smoothness of speed regulation.
4.1.4 Stability of Angular Velocity
Stability is the change of angular velocity at specified deviation of load moment and depends on the inflexibility of the mechanical characteristics. The higher inflexibility of mechanical characteristics, the higher the stability.
If during the speed regulation inflexibility of mechanical characteristic changes, than speed deviation from specified value changes too.
Two characteristics of DC motor of independent excitation at different inflexibilities are shown on the figure. The 1st characteristic is more inflexible than the 2nd one. Here speed regulation realized by the connection of additional resistor into armature circuit. If the resistance moment Mc remains constant for both characteristics, than motor operates with angular velocity ω1, after connection of additional resistor will pass on the speed ω2. But with changing of resistance moment Mc in some limits , the speed oscillations ∆ω1 will be rather small by the 1st characteristic than by the second one.
, the speed oscillations ∆ω1 will be rather small by the 1st characteristic than by the second one.
Such deviations of speed from its average value in most cases restrict the range of speed regulation.
1.4.5 Direction of Regulation
Direction of speed regulation, i.e. decreasing or increasing as to relatively basic speed is related to chosen method of speed regulation.
There is single-zone regulation down off basic speed, single-zone regulation upper of basic speed and two-zone regulation up and down of basic speed.
Basic speed (in most cases this is nominal speed), for example DC drive of independent excitation correspond to nominal value of voltage supply, nominal magnetic flux when additional resistance in armature circuit is absent.
If speed is regulated due to introduction of additional resistor in the rotor circuit – single-zone regulation down off basic speed, if speed is regulated due to field weakening – single-zone regulation upper. If regulation is realized simultaneously and by changing the supply voltage and field weakening – this is two-zone regulation.
|
|
|
4.1.6 Admissible Load in the Regulation Range
Ability of continuous operation under the load of electric drive of different speed in specified range of regulation defines the necessity of consideration of such factor of speed regulation as admissible load in the range of regulation.
Tolerated by load of motor heating Mдоп under speed regulation may be changed on one hand at the expense of increasing losses that are sum in drive at specified moment of load while regulation, on the other hand – at the expense of changing of motor cooling conditions, especially if motor has self-ventilation.
If motor has independent cooling thus the second factor is not present and the nominal value of current Iном in drive is taking as criteria for tolerated load at any speed.
Maximum value of moment Mдоп that motor can develop continuously in specified range of speed regulation is determine by motor heating and for different methods of regulation – speeds will be different.
Changing of load moment Mc depending on speed for different industrial mechanisms are different (4th class). So mechanisms of the 1st class reqire regulation of speed at constant moment of load Mc (lifting mechanism, rolling mill, etc). On the other hand mechanism exist where regulation of speed occurs with constant power, for example, turning lathe where keeping of constant cutting speed and constant cutting force when machining the part is desirable. With this at this condition product of cutting speed and its force produces constant efficiency.
Keeping value of cutting speed constant is realized by smooth regulation of angular speed of electric drive.
Complete drive utilization, when it works at different regulating characteristics with different speed will be available when with all these changes load current equal to rated current with remain unchanged. (If when operating with all the characteristics the consumed current is equal to the nominal current, than it will mean that motor is completely loaded for all kinds of speeds). With this we mean that cooling conditions remain alike as at high as well as low angular speeds of motor.
Considering above mentioned it is possible to make conclusion.
Tolerated drive load will be the load when drive current in its power circuits is equal to rated irrespectively of value of its rotation speed.
Than for DC motors tolerated moment will be
 (4.1)
(4.1)
If for conditions of equation (4.1) take this methods of speed regulation that at this regulation magnetic flux remains unchanged
 ,
,
Tolerated moment with such regulation will not change
 .
.
If taken such way of DC motor speed regulation that magnetic flux remains the same, than tolerated load moment at such regulation will be unchanged [according (4.1)]
 .
.
So moment depends on chosen method of regulation. As example let’s consider DC motor of independent excitation.
As it is shown on the figure, this motor has two zones of regulation.
1st zone (speed down regulation off from basic speed) relates to regulation with constant moment. really if the speed regulation realizes due to change of resistance of armature circuit or change of supply voltage of armature circuit with constant nominal magnetic flux of motor, than at rated current of armature tolerated moment remains constant (as mentioned above):
 =Const=Mном
=Const=Mном
Power on the motor shaft P2 in this zone changes by linear law, so that it is proportional to angular velocity
P2=Mном·ω
In 2nd zone speed regulation exists at constant power P2 if this regulation realizes due to change of magnetic flux Ф.
In this case at constant armature current that equals to the nominal current, with increasing of angular velocity magnetic flux should be regulated by the hyperbola law that comes from equation of electromechanical characteristic
 .
.
|
|
|
 , (4.2)
, (4.2)
i.e. mathematically it is equation of the y= type – hyperbola.
type – hyperbola.
In such a way the dependence between tolerated moment and angular velocity in the regulation zone II becomes clear, i.e.:
(4.3)
Substitute the values of Ф from equation (4.2) into (4.3)
 ;
;
 . (4.4)
. (4.4)
Multiply (4.4) by 
 , (4.5)
, (4.5)
As 
 ,
,
in such a way power in the second regulation zone remains constant, as
 ; (4.6)
; (4.6)
Substituting of Mдоп values into (4.6) we get from (4.5)
 ,
,
 . (4.7)
. (4.7)
Tolerated load for second type of electric drives defines due to analogical methods and considerations.
In the drives with ventilator moment of motor cannot be loaded completely at low speeds.
Advantage of regulation of such drives is the increasing of moment with increase of angular aped. Therefore it is needed to chose power of motor in respect to load at maximal angular velocity, at others lower speeds motor will be underloaded.
4.1.7 Quick response, Oscillatinary, Overregulation
With automatic regulation of electric drive coordinates dynamic qualitative features of regulation are of prime importance:
- Quick response;
- Oscillations;
- Overregulation,
which determines the character of operation of transition process when regulation.
Quick response may be characterized by the time regulation tp within which variable speed reaches specified value for the first time, first tmax time when deviation from regulating parameter reaches the first maximum, or by total time of transitive process tnn (see the figure).
Oscillationary may be characterized by the time of the oscillation speed suppression (tnn – tp).
Overregulation is characterized by the maxium deviation that is opposite to the origin one related to the specified (steady-state) value of regulated parameter (speed)
 .
.
Motion time (time delay for motion start) influences on the quick response and totally on continuity of transient process tnn.
4.1.8 Efficiency of Speed Regulation
Prime important factor in speed regulation is efficiency. Application of regulated electric drive is connected with some additional expanses, which should be justified with the growth of productivity, reliability, quality, etc.
Efficiency of speed regulation system defines by two factors:
- Initial expanses on creation of electric drive, required for feating of additional fecilities;
- Operational costs.
The most economically profitable will be drive that will provide the highest efficiency of mechanism with required quality of technological process and short period of justification. With this the electric drive reliability, deficit and cost of materials and equipment shouldn’t be neglected.
Operational spending considers mainly the energy datum of electric drive (efficiency factor and cosφ) when regulating.
Here the efficiency factor and cosφ of electric drive in general and average values of efficiency factor and cosφ per cycle should be differentiated.
Energy datum of electric drive is:
 ,
,

Where P1 – active power applied to electric drive, kW;
P2 – power on the electric drive shaft, kW;
∆P – losses of electric drive power when speed regulating, kW;
S – total power of electric drive, kVA.
When electric drive operating on different speeds per any cycle the average efficiency factor and average cosφ per this cycle should be defined by the general rule o integral estimation of average values of variables (considering the angular velocity of regulating motor variable):
 ;
;
Where ωmax and ωmin – maximal and minial values of angular velocity respectively.
|
|
|
The value of efficiency factor and cosφ substantially depends on choosing of regulation method, as far as different parameters of electric motor and supply main change when regulation the speed.
Energy losses are significant if regulation is realized at the expense of change of parameters of electric motor main circuit; they will be insignificant if regulation realizes for example in the auxiliary circuits, or in the excitation circuit of motor.
When choosing of speed regulation system it should be kept in mind that in most cases there is such regularity in the regulation method cost: the less initial cost of the method (cost of its designing),the higher operational spending it has, or vice versa.
For example, speed regulation by introduction of additional resistor into the armature circuit of DC drive is very attractive from the standpoint of initial spending on designing of the method (for example, in most cases there are no need in acquisition of new rheostat if the available in the circuit starting rheostat may be used). But in this case energy losses at exploration will be rather large, as we introduce the additional resistance into the main circuit of a motor.
Such method is available when operation on lowered speed is short-term (regulating rheostat is introduced in the principal current circuit for a short period of time).
In most cases it is better to have more spending on designing of ethod and it will be cheaper in conclusion (since when explorating the energy expenses will be small, efficiency, quality and reliability will be high).
4.2 Methods of Speed Regulation
Only those methods of regulation will be considered that are connected with influence on electric motor, but not those which are connected with the change of parameters of electric drive mechanical part kinematics.
Methods of regulation of speed by influence in electric motor should be divided into two general groups.
The 1st group. Methods that provides speed regulation of electric motor due to change of regulation of parameters of motor supply main. Mainly it is two parameters.
-supply-line voltage;
-power-line frequency.
For this special equipment that is functionally regulated by energy sources is used. It may be an electric machine feed sources of static convertors (mostly semiconducting). Such equipment has high cost relatively to the motor cost but it provides sooth change of voltage and frequency values in the wide range.
The 2nd group. Methods that provides speed regulation of electric motor due to change of parameters of electric motor itself (active and inductive resistance of motor windings, number of turns of winding, number of poles, etc).
Facilities for realization of change of mentioned above parameters have substantially lower cost than facilities of the 1st group, but also they are not so effective.
4.3 Basic Methods of DC Motor of Independent Excitation Speed Regulation
For such electric motors according to their electromechanical characteristics
there are available three basic methods of speed regulation:
-change of value of the supply main voltage (Um);
-change of the armature circuit resistance (Rя);
-change of value of motor primary magnetic flux (Ф).
Let’s consider them in such order.
4.3.1Regulation of Angular Velocity by Means of Additional Resistors in Armature Circuit
Regulation of angular velocity by means of change of armature circuit resistance (fragment b on the figure) doesn’t require specific explanations. This method comes from considered above rheostat characteristics of DC motor of independent excitation (fragment a on the figure).
Set of rheostat characteristics (see fragment a on the figure) comes from one point (intersects in one point) which is the point of ideal idling rate ω0, i.e. value of ω0 doesn’t depend on resistance Rяд. Characteristic slope defines by armature circuit resistance (with fixed value if moment) and with increasing of resistance  slope increases too (characteristic inflexibility decreases). Regulation realizes at nominal parameters of motor (only resistance Rяд of armature circuit changes):
slope increases too (characteristic inflexibility decreases). Regulation realizes at nominal parameters of motor (only resistance Rяд of armature circuit changes):
 ;
;  ;
;  .
.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 646; Нарушение авторских прав?; Мы поможем в написании вашей работы!