КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пряме керування моментом асинхронного двигуна
|
|
|
|
Подальшим розвитком векторного керування є пряме керування моментом двигуна (Direct Torque Control-ДТС). Принцип такого ке-рування був опублікований у 1985 р. і через 10 років фірмою АВВ він був реалізований.
Мета прямого керування моментом є забезпечення швидкої реак-ції електромагнітного моменту АД на керуючі впливом. На відміну від векторного керування, коли зміна моменту досягається шляхом зміни струму статора, який є керованою змінною, в системі прямого керування моментом керованого величиною є потокозчеплення ста-тора. Його зміна досягається зміною положення вектора напруги шляхом відповідного перемикання ключів інвертора.
При прямому керуванні електромагнітний момент розраховують за формулою
 , (11.12)
, (11.12)
де  ,
,  і
і  – відповідно індуктивності намагнічуючого конту-ру, обмоток статора і ротора;
– відповідно індуктивності намагнічуючого конту-ру, обмоток статора і ротора;  – кут між векторами потокозчеплення статора і ротора (рис.11.10).
– кут між векторами потокозчеплення статора і ротора (рис.11.10).
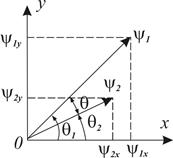 Оскільки електромеханічна стала часу ротора АД досить велика, то мож-на вважати, що на кожному кроці роз-рахунку модуль потокозчеплення ро-тора
Оскільки електромеханічна стала часу ротора АД досить велика, то мож-на вважати, що на кожному кроці роз-рахунку модуль потокозчеплення ро-тора  залишається сталим.
залишається сталим.
 Якщо модуль потокозчеплення ста-тора
Якщо модуль потокозчеплення ста-тора  впливом на вектор напруги
впливом на вектор напруги  підтримувати також сталим, то електромагнітний момент двигуна залежатиме згідно (11.12) тільки від кута . Зміна кута досягається зміною положення вектора напруги на статорі за рахунок відповідної зміни станів ключів інвертора.
підтримувати також сталим, то електромагнітний момент двигуна залежатиме згідно (11.12) тільки від кута . Зміна кута досягається зміною положення вектора напруги на статорі за рахунок відповідної зміни станів ключів інвертора.
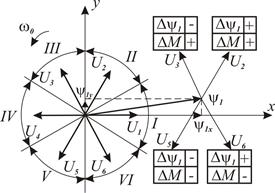
 В інверторі напруги вектор напруги при перемиканні ключів за „законом 1800” повертається у нерухомій системі координат х-у на 60 електричних градусів і може займати одне із шести фіксованих положень в одному із шести секторів І-VI (рис.11.11).
В інверторі напруги вектор напруги при перемиканні ключів за „законом 1800” повертається у нерухомій системі координат х-у на 60 електричних градусів і може займати одне із шести фіксованих положень в одному із шести секторів І-VI (рис.11.11).
Зв’язок вектора на-пруги  і вектора потокозчеплення
і вектора потокозчеплення  в системі координат
в системі координат  (рис.11.11) визначається рівнянням рівноваги напруг
(рис.11.11) визначається рівнянням рівноваги напруг
|
|
|
 .
.
Якщо знехтувати опором обмотки статора, то
 . (11.13)
. (11.13)
Тоді проекції вектора напруги  і
і  будуть визначати швидкості зміни проекцій вектора потокозчеплен-ня в залежності від прикладеної напруги. Замінивши похідні мали-ми кінцевими величинами, одержимо згідно (11.13)
будуть визначати швидкості зміни проекцій вектора потокозчеплен-ня в залежності від прикладеної напруги. Замінивши похідні мали-ми кінцевими величинами, одержимо згідно (11.13) 
 , або у приростах
, або у приростах  і
і  . Повні значення проекцій вектора потокозчеплення будуть такими:
. Повні значення проекцій вектора потокозчеплення будуть такими:
 ;
;  , (11.14)
, (11.14)
де  і
і  – проекції вектора потокозчеплення статора, яке було до зміни вектора
– проекції вектора потокозчеплення статора, яке було до зміни вектора  ;
;  – відрізок часу, на протязі якого діяв прикладений вектор напруги.
– відрізок часу, на протязі якого діяв прикладений вектор напруги.
Отже, змінюючи положення вектора напруги (його складові  і
і  ), можна повертати вектор
), можна повертати вектор  і змінювати кут , впливаючи цим на зміну моменту двигуна.
і змінювати кут , впливаючи цим на зміну моменту двигуна.
На рис.11.11 показані нерухома система координат і розта-шовані на ній просторові вектори напруги  на виході інвер-тора, від якого живиться обмотка статора двигуна, а також миттєве положення вектора потокозчеплення статора
на виході інвер-тора, від якого живиться обмотка статора двигуна, а також миттєве положення вектора потокозчеплення статора  , який в даний мо-мент часу знаходиться у секторі
, який в даний мо-мент часу знаходиться у секторі  .
.
Щоби забезпечити пряме керування моментом переключення векторів напруги (переключення ключів інвертора), потрібно прово-дити тоді, коли момент двигуна чи потокозчеплення відхилюються від заданих значень на величину, рівну прийнятій похибці.
З (11.12) слідує, що при сталих значеннях модулів і електромагнітний момент двигуна збільшується,коли збільшується кут . Кут збільшується, коли вектор напруги повертається проти годинникової стрілки (переходить з сектора І у сектор ІІ чи ІІІ), і зменшується, коли він повертається за стрілкою годинника (проти напряму руху магнітного поля статора – сектори VI і V).
Для ілюстрації алгоритму перемикання векторів напруги на рис.11.11 початки векторів напруги  ,
,  ,
,  і
і  перенесені на кінець вектора . Кожний вектор показує на табличку, в якій вказані знаки приростів потокозчеплення статора і моменту двигу-на, які виникають при підключенні вказаних векторів. Знак „+” означає, що величина збільшується, а знак „–” – що зменшується. Наприклад, якщо в даний момент часу модуль і електромагніт-ний момент менші проти необхідних (знаки „+”), то необхідно пере-йти на вектор , то призведе до їх збільшення.
перенесені на кінець вектора . Кожний вектор показує на табличку, в якій вказані знаки приростів потокозчеплення статора і моменту двигу-на, які виникають при підключенні вказаних векторів. Знак „+” означає, що величина збільшується, а знак „–” – що зменшується. Наприклад, якщо в даний момент часу модуль і електромагніт-ний момент менші проти необхідних (знаки „+”), то необхідно пере-йти на вектор , то призведе до їх збільшення.
|
|
|
Якщо модуль вектора великий (знак „–”), а електромагніт-ний момент малий (знак „+”), то потрібно переключитись на вектор . Це призведе до зменшення потокозчеплення (у рівнянні (11.13) стане від’ємним) і збільшення моменту за рахунок збільшення кута . Коли модуль і момент великі, то необхідно переключи-тись на вектор , що спричинить їх зменшення. Коли треба збіль-шити і зменшити момент двигуна, то переходять на вектор .
На відміну від векторного керування швидкістю АД в системі прямого керування моментом немає широтно-імпульсної модуляції зі сталою частотою, а перемикання ключів здійснюється у залежно-сті відхилення дійсних значень модуля вектора потокозчеплення статора і моменту двигуна від заданих значень. Структурна схема, яка реалізує такий спосіб керування, наведена на рис.11.12 До її складу входять компаратори потоку і моменту з гістерезисними характеристиками, таблиці оптимальних перемикань ключів, авто-номний інвертор напруги частотного перетворювача, давачі напру-ги і струмів та математична модель двигуна.
На входи компараторів подаються відхилення фактичних зна-чень модуля і моменту двигуна  від заданих значень
від заданих значень  і
і  . Вихідна змінна компаратора потокозчеплення
. Вихідна змінна компаратора потокозчеплення  може приймати два значення: 1 і 0. Якщо
може приймати два значення: 1 і 0. Якщо  на величину
на величину  (допустиму похибку), то його потрібно збільшити і це відповідає
(допустиму похибку), то його потрібно збільшити і це відповідає  . Якщо
. Якщо  на , то його потрібно зменшити і це відповідає
на , то його потрібно зменшити і це відповідає  .
.
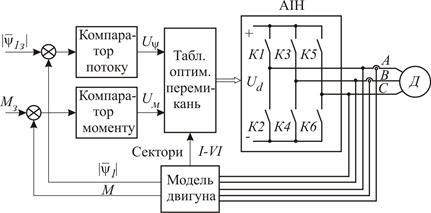
Рис.11.12. Структурна схема прямого керування моментом
Вихідний сигнал компаратора  може приймати три значення: 1, 0 і -1. Сигналу
може приймати три значення: 1, 0 і -1. Сигналу  відповідає стан, коли треба збільшити мо-мент двигуна; при сигналі
відповідає стан, коли треба збільшити мо-мент двигуна; при сигналі  момент треба зменшити. Стан
момент треба зменшити. Стан  означає, що момент знаходиться в допустимих межах (в зоні нечутливості компаратора).
означає, що момент знаходиться в допустимих межах (в зоні нечутливості компаратора).
У відповідності з наведеними алгоритмами формується таблиця переключень інвертора. В залежності від значень і для кожного сектора, в якому у даний момент часу знаходиться вектор потокозчеплення, вказується вектор напруги, а отже і набір ключів інвертора. При цьому номер сектора визначається на підставі моделі двигуна.
|
|
|
Отже, для прямого керування моментом потрібно знати на кож-ному такті керування миттєві значення потокозчеплення статора і моменту двигуна. Для цього модель здійснює опитування миттєвих значень фазних напруг і струмів з високою частотою (порядка  ) і розраховує протягом певного часу квантування дійсні зна-чення потокозчеплення статора, електромагнітного моменту й шви-дкості обертання двигуна, знання якої необхідне для керування час-тотою ПЧ. Необхідні обчислення здійснює швидкодіючий сигналь-ний мікропроцесор на підставі вимірюваних значень напруг та стру-мів і введених попередньо у модель ідентифікованих параметрів двигуна.
) і розраховує протягом певного часу квантування дійсні зна-чення потокозчеплення статора, електромагнітного моменту й шви-дкості обертання двигуна, знання якої необхідне для керування час-тотою ПЧ. Необхідні обчислення здійснює швидкодіючий сигналь-ний мікропроцесор на підставі вимірюваних значень напруг та стру-мів і введених попередньо у модель ідентифікованих параметрів двигуна.
Основною перевагою прямого керування моментом є висока швидкодія, яка знаходиться в межах 6...10мс.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 806; Нарушение авторских прав?; Мы поможем в написании вашей работы!