КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Моделлю
|
|
|
|
Безпошукова адаптивна система керування з еталонною
БАС з еталонною моделлю використовується в основному тоді, коли необхідно забезпечити бажані статичні і динамічні показники роботи системи при зміні її параметрів шляхом зміни параметрів регулятора (коефіцієнта підсилення, сталих часу чи формування додаткових впливів).
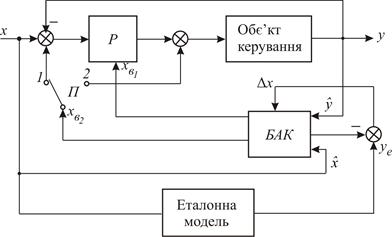
Рис. 14.1. Безпошукова адаптивна система з еталонною моделлю
Зміну параметрів регулятора чи додаткові впливи здійснює блок адаптивного керування БАК, на вхід якого подаються вимірювані значення вхідної  і вихідної
і вихідної  величини.
величини.
У складі БАК може бути пристрій, котрий оцінює недоступні вимірюванню змінні, наприклад, активний опір обмотки якоря чи ротора, і формує вихідний вплив  , величина і знак якого зале-жать від відхилення вихідної змінної
, величина і знак якого зале-жать від відхилення вихідної змінної  від вихідної змінної еталон-ної моделі
від вихідної змінної еталон-ної моделі  в установленому режимі.
в установленому режимі.
 Вихідний адаптивний вплив
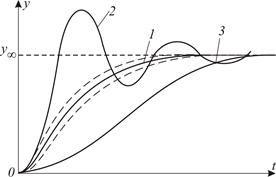
Вихідний адаптивний вплив  спричиняє зміну параметрів ре-гулятора Р, а вплив – може подаватись на вхід чи на вихід регу-лятора в залежності від положення перемикача П (рис.14.1). Порівняння вихідних змінних з об’єкта керування і еталонної моделі відбувається безперервно і безперервно БАК формує відповідні впливи на регулятор, який протидіє відхиленню від на величину, більшу зони нечутливості БАК. В результаті вихідна змінна об’єкта не буде виходити за межі «коридора», показаного на рис. 14.2 пунктирними лініями, і мо-же відхилятись від ви-хідної змінної еталонної моделі (крива 1 на рис. 14.2). Для змен-шення ширини «коридора» слід формувати і ще вплив, пропорційний похідній
спричиняє зміну параметрів ре-гулятора Р, а вплив – може подаватись на вхід чи на вихід регу-лятора в залежності від положення перемикача П (рис.14.1). Порівняння вихідних змінних з об’єкта керування і еталонної моделі відбувається безперервно і безперервно БАК формує відповідні впливи на регулятор, який протидіє відхиленню від на величину, більшу зони нечутливості БАК. В результаті вихідна змінна об’єкта не буде виходити за межі «коридора», показаного на рис. 14.2 пунктирними лініями, і мо-же відхилятись від ви-хідної змінної еталонної моделі (крива 1 на рис. 14.2). Для змен-шення ширини «коридора» слід формувати і ще вплив, пропорційний похідній  .
.
 Якби не було БАК, то при зміні параметрів об’єкта керування перехідні процеси мо-гли бути з перерегулюванням (крива 2) чи без нього, але з великим часом регулювання (крива 3).
Якби не було БАК, то при зміні параметрів об’єкта керування перехідні процеси мо-гли бути з перерегулюванням (крива 2) чи без нього, але з великим часом регулювання (крива 3).
|
|
|
В якості еталонної моделі можна вибрати ланку другого порядку, яка буде описуватись диференціальним рівнянням
 , (14.1)
, (14.1)
де  – коефіцієнт затухання;
– коефіцієнт затухання;  – власна частота коливань,
– власна частота коливань,  .
.
 При початкових умовах
При початкових умовах  і
і  розв’язки (14.1) у відносних одиницях представлено сімейством кривих (рис. 14.3). Графічне представлення вихідної величини еталонної моделі
розв’язки (14.1) у відносних одиницях представлено сімейством кривих (рис. 14.3). Графічне представлення вихідної величини еталонної моделі  наглядно показує, до якої кривої необхідно наближати перехідний процес в адаптивній системі керування, і спрощує визначення коефіцієнтів рівняння (14.1) за вибранимиі
наглядно показує, до якої кривої необхідно наближати перехідний процес в адаптивній системі керування, і спрощує визначення коефіцієнтів рівняння (14.1) за вибранимиі  . При цьому усталене значення
. При цьому усталене значення

 ,
,
де  – коефіцієнт підсилен-ня розімкненої системи з одиничним зворотним зв’язком. Вибравши еталонний перехідний процес, необхідно перевірити чи зможе його реалізувати двигун, момент якого завжди обмежений величиною
– коефіцієнт підсилен-ня розімкненої системи з одиничним зворотним зв’язком. Вибравши еталонний перехідний процес, необхідно перевірити чи зможе його реалізувати двигун, момент якого завжди обмежений величиною  за умови, що
за умови, що  . Очевидно, що максимальне значення розрахункового моменту
. Очевидно, що максимальне значення розрахункового моменту  , визначеного за кривою , повинно задовільняти умову
, визначеного за кривою , повинно задовільняти умову
 . (14.2)
. (14.2)
Вираз (14.2) називається 1-ю умовою реалізації закону 
 . Величину можна визначити, підставивши в рівнян-ня руху електропривода
. Величину можна визначити, підставивши в рівнян-ня руху електропривода  значення
значення  у точці
у точці  . Розв’язок (14.1) залежить від коренів характеристичного рівняння
. Розв’язок (14.1) залежить від коренів характеристичного рівняння  , які можуть бути комплексно-спряженими
, які можуть бути комплексно-спряженими  , кратними
, кратними  і дійсними
і дійсними  .
.
У випадку комплексних коренів
 (14.3)
(14.3)
і першу умову реалізації функції отримаємо у виді
 , (14.4)
, (14.4)
де  – максимальний момент інерції електропривода;
– максимальний момент інерції електропривода;  .
.
У випадку дійсних коренів (аперіодичний перехідний процес)
 (14.5)
(14.5)
і умова (14.2) матиме вид:
 , (14.6)
, (14.6)
де  .
.
Коли  , то
, то
 (14.7)
(14.7)
і
 . (14.8)
. (14.8)
Електропривод таких виробничих механізмів як швидкісні ліфти, важкі верстати та інші повинен забезпечити не тільки обмеження моменту (прискорення), але і зміну прискорення – ривка, величи-ною  . Тому величина
. Тому величина  для вибраної не повинна перевищувати . Умова
для вибраної не повинна перевищувати . Умова
 (14.9)
(14.9)
називається 2-ю умовою реалізації .
|
|
|
Для наведених на рис.14.3 кривих умови /14.9/ будуть такими:
Ø для 
 , (14.10)
, (14.10)
де  ;
;
Ø для 
 ;
;
(14.11)
Ø для
 (14.12)
(14.12)
Отримані формули для визначення допустимого моменту і ривка дозволяють не тільки перевірити умови реалізації адаптивного ке-рування, але і визначити , тобто час регулювання, який буде за-довольняти вказаним умовам.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 349; Нарушение авторских прав?; Мы поможем в написании вашей работы!