КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Загальна характеристика
|
|
|
|
Слідкуючий електропривод
Слідкуючий електропривод призначений для переміщення робо-чого органу (РО) у відповідності з задаючим сигналом, який може змінюватись за довільним законом. Задаючим сигналом може бути рухомий об’єкт – об’єкт стеження, наприклад, літак, за яким слідкує радар; одна половина розвідного мосту; командний пристрій з руч-ним керуванням тощо. Отже, слідкуючий електропривод забезпечує слідкування (стеження) РО за наперед не визначеним задаючим сиг-налом. При цьому слідкування повинне відбуватися з необхідною точністю як у часі, так і у просторі. У загальному випадку РО пови-нен рухатись по траєкторії, яку формує задаючий пристрій.
Якщо робочий орган потрібно рухати по просторовій траєкторії, то для його переміщення потрібні три слідуючі електроприводи, забезпечуючи рух по трьох координатах. Якщо додатково потрібно ще і повертати РО навколо своїх вісей, то це можуть забезпечити п’ять приводів. До таких багато координатних механізмів віднося-ться роботи та маніпулятори, які представляють собою складні взаємозв’язані електромеханічні системи.
Основним показником роботи слідкуючого електропривода є точність слідкування, тобто різниця між траєкторією, яку формує задаючий пристрій, і траєкторією робочого органу. Цей показник називають іще розузгодженням чи похибкою. При обертовому русі – це різниця між задаючим кутом  , який формує задаючий при-стрій, і кутом повороту вала РО
, який формує задаючий при-стрій, і кутом повороту вала РО  :
:
 . (15.1)
. (15.1)
Різновидом слідкуючого електропривода є позиційний електро-привод, який забезпечує переміщення РО з одного положення в інше з необхідною точністю. При цьому траекторія руху наперед ві-дома, але часовий графік переміщення може бути довільним або визначитись технологічним процесом (переміщення кабіни ліфта, візка мостового крана тощо). Режим відпрацювання електроприводом заданого переміщення називається позиціюванням.
|
|
|
Структурною ознакою слідкуючого і позиційного електроприво-дів є від’ємний зворотний зв'язок за переміщенням (рис.15.1). Їх функціональна схема складається з двох частин: системи керування
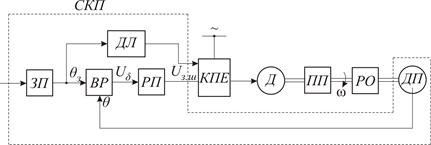
Рис. 15.1. Функціональна схема слідкуючого електропривода
переміщенням СКП і системи регулювання швидкості, до складу якої входять керований перетворювач енергії КПЕ, двигун Д, пере-давальний пристрій ПП і робочий орган РО. Елементи КПЕ і Д представляють собою регульований електропривод постійного чи змінного струму, в якому вихідною координатою є швидкість РО  , а вхідною – сигнал задання швидкості
, а вхідною – сигнал задання швидкості  , який створює СКП.
, який створює СКП.
Система керування переміщенням складається з задаючого при-строю ЗП, вимірювача розузгодження ВР з вихідною напругою  , регулятора переміщення РП і давача положення ДП. Для зменшення динамічних похибок можуть використовуватись диференціальні ланки ДЛ, які будуть формувати на КПЕ впливи, пропорційні похідним
, регулятора переміщення РП і давача положення ДП. Для зменшення динамічних похибок можуть використовуватись диференціальні ланки ДЛ, які будуть формувати на КПЕ впливи, пропорційні похідним  і
і  . Зворотний зв'язок за переміщенням і диференціальні ланки створюють комбіновану сис-тему керування: систему керування за відхиленням і збуренням, яка забезпечує високу швидкодію і малу похибку.
. Зворотний зв'язок за переміщенням і диференціальні ланки створюють комбіновану сис-тему керування: систему керування за відхиленням і збуренням, яка забезпечує високу швидкодію і малу похибку.
В залежності від способу задання переміщення РО розрізняють три режими керування:
Ø керування за розузгодженням, коли переміщення об’єкта стеження наперед невідомо і керування ведеться за різницею задаю-чого сигналу і сигналу зворотного зв’язку (формула 15.1);
Ø ручний, коли завдання на переміщення РО здійснюється по-воротом вручну вісі задаючого пристрою;
Ø програмний, коли закон переміщення відомий і формується у виді сигналів ,  і
і  .
.
Перші два режими характерні для слідкуючого електропривода, а третій – для позиційного.
|
|
|
За способом формування керуючого впливу слідкуючі електро-приводи поділяються на дискретні (релейні) і неперервні.
Дискретний слідкуючий електропривод характеризується тим, що напруга на виконавчий двигун подається тоді, коли кут розузго-дження досягає заданого значення  . При подальшому збільшен-ні
. При подальшому збільшен-ні  кутова швидкість двигуна і прискорення не змінюються, бо вони визначаються параметрами самого електропривода. При
кутова швидкість двигуна і прискорення не змінюються, бо вони визначаються параметрами самого електропривода. При  двигун зупиняється. За такого керування система керува-ння проста, але точність не висока. Тому її використовують тоді, коли не потрібна висока точність та швидкодія.
двигун зупиняється. За такого керування система керува-ння проста, але точність не висока. Тому її використовують тоді, коли не потрібна висока точність та швидкодія.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 753; Нарушение авторских прав?; Мы поможем в написании вашей работы!