КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Електроприводом
|
|
|
|
Безперервні системи керування слідкуючим
В безперервних системах керування в якості задаючого прист-рою і давача положення використовують сельсини. Вони мають по дві обмотки: однофазну обмотку збудження ОЗ, яка розташована на статорі, і трифазну, розташовану на роторі.
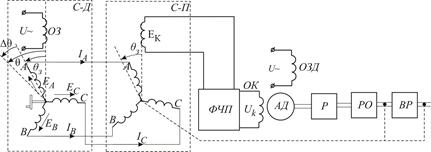
Рис. 15.2. Принципова схема слідкуючого електропривода.
Два сельсини з електричним з’єднанням роторних обмоток дозволяють вимірювати кут розузгодження і їх називають сельсин-давач (С-Д) і сельсин-приймач (С-П) (рис.15.2). Принцип вимірювання кута розузгодження полягає у наступному.
При живленні обмотки збудження С-Д синусоїдним струмом виникає пульсуючий магнітний потік, який індукує в фазних обмот-ках ротора ЕРС, величина яких залежить від кута між віссю обмот-ки збудження і віссю відповідної фази:
 ;
;
 ; (15.2)
; (15.2)
 ,
,
де  – діюче значення ЕРС, індуковане в фазній обмотці ротора, коли її вісь співпадає з віссю обмотки збудження.
– діюче значення ЕРС, індуковане в фазній обмотці ротора, коли її вісь співпадає з віссю обмотки збудження.
 Під дією цих ЕРС в трифазному колі роторів виникають струми
Під дією цих ЕРС в трифазному колі роторів виникають струми  ,
,  і
і  , які, протікаючи в обмотках ротора С-П, створюють результуюче магнітне поле. Напрям поля відносно фазних обмоток С-П буде таким же, як і в С-Д, тобто вісь пульсуючого поля С-П складе кут
, які, протікаючи в обмотках ротора С-П, створюють результуюче магнітне поле. Напрям поля відносно фазних обмоток С-П буде таким же, як і в С-Д, тобто вісь пульсуючого поля С-П складе кут  з віссю обмотки збудження С-П. Магнітний потік цього поля буде наводити в обмотці збудження електро-рушійну силу
з віссю обмотки збудження С-П. Магнітний потік цього поля буде наводити в обмотці збудження електро-рушійну силу
 , (15.3)
, (15.3)
 де
де  – ЕРС обмотки збуд-ження С-П, коли вісі обмо-ток збудження сельсинів співпадають у просторі.
– ЕРС обмотки збуд-ження С-П, коли вісі обмо-ток збудження сельсинів співпадають у просторі.
При повороті ротора С-Д на кут  на цей же кут по-вернеться і вісь магнітного потоку і індукована ЕРС в обмотці збудження стане рівною
на цей же кут по-вернеться і вісь магнітного потоку і індукована ЕРС в обмотці збудження стане рівною
 , (15.4)
, (15.4)
де  – кут розузгодження між положеннями роторів сельсинів да-вача і приймача.
– кут розузгодження між положеннями роторів сельсинів да-вача і приймача.
На рис.15.3 пунктирною лінією показана залежність (15.4), з якої видно, що крутизна характеристики при малих значеннях не-значна, що ускладнює її використання для керування. Тому за узгоджене положення сельсинів приймають таке, коли їх вісі взаємно-перпендикулярні, що досягається поворотом ротора сельсина приймача на кут  . За такого положення
. За такого положення  роторів сельсинів
роторів сельсинів
|
|
|
 (15.5)
(15.5)
і крутизна характеристики максимальна (суцільна крива на рис.15.3).
Якщо ротор С-Д повернути у протилежному напрямі, то ЕРС  , яку називають керуючою, зміниться за фазою на
, яку називають керуючою, зміниться за фазою на  . Отже, при повороті ротора сельсина-давача ЕРС обмотки збудження сель-сина-приймача змінюється за величиною, а напрям повороту визна-чає фазу.
. Отже, при повороті ротора сельсина-давача ЕРС обмотки збудження сель-сина-приймача змінюється за величиною, а напрям повороту визна-чає фазу.
За такого методу вимірювання кута розузгодження принцип ро-боти слідкуючого електропривода з безперервним керуванням поля-гає у наступному.
В узгодженому положенні сельсинів ЕРС обмотки збудження  . При повороті ротора С-Д на деякий кут виникає ЕРС , яка при кутах розузгодження
. При повороті ротора С-Д на деякий кут виникає ЕРС , яка при кутах розузгодження  пропорційна
пропорційна  . Посилена фазочутливим підсилювачем ФЧП вона по-дається на обмотку керування ОК двофазного асинхронного двигу-на (рис.15.2), швидкість якого визначає амплітуда вихідної напруги
. Посилена фазочутливим підсилювачем ФЧП вона по-дається на обмотку керування ОК двофазного асинхронного двигу-на (рис.15.2), швидкість якого визначає амплітуда вихідної напруги  , а напрям обертання – фаза. При увімкненій обмотці збуджен-ня ОЗД асинхронний двигун через регулятор Р приводить в рух ро-бочий орган РО, який безпосередньо або через вимірювальний ре-дуктор ВР повертає ротор сельсина-приймача, зменшуючи кут роз-узгодження.
, а напрям обертання – фаза. При увімкненій обмотці збуджен-ня ОЗД асинхронний двигун через регулятор Р приводить в рух ро-бочий орган РО, який безпосередньо або через вимірювальний ре-дуктор ВР повертає ротор сельсина-приймача, зменшуючи кут роз-узгодження.
Якщо ротор С-Д повертати безперервно, то безперервно буде ру-хатись РО і кут розузгодження буде сталим за умови, що швид-кість ротора  . Якщо ротор С-Д повернути на кут , то на такий же кут повернеться і вихідний вал ВР – відбудеться режим позиціюванням.
. Якщо ротор С-Д повернути на кут , то на такий же кут повернеться і вихідний вал ВР – відбудеться режим позиціюванням.
При змінні швидкості обертання ротора С-Д буде змінюватись і кут , який визначатиме величину похибки слідкування.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 545; Нарушение авторских прав?; Мы поможем в написании вашей работы!