КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методи та засоби вимірювання електричних та неелектричних величин 6 страница
|
|
|
|

тут Rt0 - опір тензорестора при температурі 0°С; εt - температурний коефіцієнт опору тензорезистора.
Якщо таке мостове коло при відсутності вимірюваної деформації буде в рівновазі, тобто RTR3 = R2RTK то внаслідок дії вимірюваної деформації і відповідно зміни опору робочого тензорезистора на  RT рівновага порушується, а вихідна напруга за умови, що внутрішній опір джерела живлення нехтовно малий, буде дорівнювати
RT рівновага порушується, а вихідна напруга за умови, що внутрішній опір джерела живлення нехтовно малий, буде дорівнювати

де εR- відносна зміна опору тензорезистора; 
Для симетричного моста, коли RTK = RTO, а R2 = R3, матимемо
Як видно з останнього виразу, функція перетворення такого мостового кола нелінійна. Однак при невеликих змінах (у металевих тензорезисторах ці зміни не перевищують 1 %), коли εR < 0,01, можна вважати

Оскільки відношення відносної зміни опору  εR до відносної деформації
εR до відносної деформації  характеризується коефіцієнтом відносної тензочутливості k, то залежність вихідної напруги від вимірюваної деформації запишеться як
характеризується коефіцієнтом відносної тензочутливості k, то залежність вихідної напруги від вимірюваної деформації запишеться як
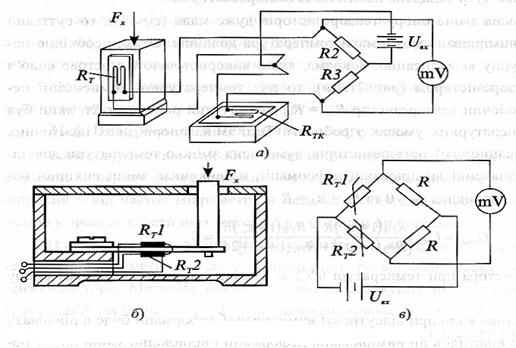
Рис.5. Схема увімкнення тензорезисторів у мостові кола
Якщо первинними перетворювачами сили (тиску) в деформацію є консольні (мембранні) перетворювальні елементи, то як робочі можна використати два ідентичні тензорезистори, наклеєні з протилежних сторін чутливого елемента так, що один сприймає деформацію розтягу, а інший деформацію стиску, то можливе диференціальне їх увімкнення в мостове коло (рис. 5,б).
У цьому випадку температурна похибка також виключається, а чутливість мостового кола збільшується вдвічі.
Дві пари диференціальних тензорезисторів, які утворюють повний тензометричний міст, забезпечують найкращу корекцію температурних похибок і в чотири рази збільшують чутливість.
Якщо використовується блок із чотирьох ідентичних тензорезисторів, наклеєних на поверхність досліджуваного об'єкта так, що тензорезистори R T1 та RT3 (рис. 6,а) сприймають поздовжню деформацію, a R T2 та RT4 - поперечну, то при їх увімкненні в мостове коло (рис. 6,б) температурна похибка також буде компенсуватись, а вихідна напруга
|
|
|

Враховуючи, що для металевих тензорезисторів εR не перевищує 0,01, а коефіцієнт Пуассона μ= 0,24...0,4, матимемо

Для напівпровідникових тензорезисторів, для яких досягає сотень, а його значення є нелінійною функцією температури, залежність Uвих = f(Uвх) набуває дуже складного характеру.
Практично застосовуються складніші схеми тензометричних мостів, де, крім основних (робочих) тензорезисторів, увімкнені також регулювальний резистор для встановлення початкового значення діапазону вимірювань (найчастіше нульового значення вихідної напруги), температуро залежний резистор для компенсації зміни чутливості схеми від зміни температури довкілля, Крім резистор для регулювання і встановлення номінальної чутливості. Термозалежний резистор повинен мати добрий тепловий контакт з досліджуваним об'єктом (чи перетворювальним пружним елементом), на якому наклеєні робочі тензорезистори. Для цього він приклеюється до досліджуваного об'єкта (пружного елемента) за допомогою електроізоляційного клею з доброю теплопровідністю.
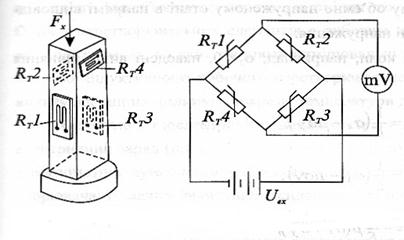
Рис. 6. Вимірювальне коло з чотирма тензорезисторами
За відсутності незрівноважених мостових кіл, у тензометрії можуть бути використані і зрівноважені мостові кола. До переваг останніх слід віднести незалежність показів від зміни напруги джерела живлення, відсутність похибки від не лінійності функції перетворення, що відзначається в незрівноважених мостових колах. Недоліком зрівноважених мостових кіл є низька швидкодія при ручному зрівноважуванні чи складність вимірювального засобу при автоматичному зрівноважуванні.
|
|
|
Вимірювання параметрів руху твердих тіл
Під параметрами руху твердого тіла розуміють лінійні та кутові переміщення центру мас і всі їх похідні в часі - швидкість, прискорення, різкість тощо.
Загалом параметри руху - векторні величини, тому їх необхідно вимірювати, визначаючи модуль відповідного вектора та кута, що характеризує положення вектора у вибраній системі координат, або визначення складових вектора на осях вибраної системи відліку. Необхідно, однак, зауважити, що здебільшого є потреба вимірювання лише модуля відповідного параметра руху.
Між параметрами руху існує просторовий та часовий зв'язок. Під просторовим розуміють взаємний зв'язок лінійних та кутових параметрів руху. Це дає змогу визначити параметри лінійного руху через геометричні розміри та параметри кутового руху, і навпаки.
Часовий взаємозв'язок параметрів руху - це інтегрально-диференціальний зв'язок між ними, внаслідок якого одні параметри руху можуть бути визначені через інші їх інтегруванням чи диференціюванням, наприклад, знаючи швидкість, можна визначити прискорення: a=dv/dt.
Методи вимірювань параметрів руху можуть бути розділені на дві групи:
- абсолютні (інерціальні) методи, в основу яких покладений справедливий для класичної механіки принцип інерції; параметри руху в цьому випадку вимірюються в інерціальному просторі, тобто в просторі, в якому справедливі закони Ньютона (просторі, що не обертається довкола так званих "нерухомих зірок");
- відносні методи, для яких параметри руху одної системи координат вимірюють відносно іншої системи координат.
Вимірюючи параметри руху з врахуванням конкретної задачі вимірювання, необхідно вибрати систему відліку. Так, визначаючи параметри руху елементів корабля відносно самого корабля (наприклад, параметрів вібрацій корпуса двигуна), систему відліку треба зв'язати з кораблем.
Вирішуючи навігаційні задачі (керування рухом об'єкта за наміченим курсом), звичайно використовують інерціальну систему координат, зв'язану з Сонячною системою, чи інерціальну систему координат з початком відліку в центрі Землі.
Залежно від методу, покладеного в основу принципу дії вимірювального засобу, всі вимірювальні засоби можуть бути розділені на дві групи: інерціальні та контактні. В інерціальних засобах вимірювань відсутній безпосередній контакт між досліджуваним об'єктом та нерухомою системою відліку, а вхідною величиною первинних перетворювачів є сила інерції, що сприймається корпусом давача, з яким зв'язана власна (рухома) система відліку. Інерціальні прилади для вимірювань параметрів лінійного руху прийнято називати сейсмічними, а кутового - гіроскопічними.
|
|
|
До контактних належать засоби, основані на безпосередньому контакті між рухомим об'єктом і системою, прийнятою за нерухому. Контакт не обов'язково повинен бути механічним, він може забезпечуватись оптичними, акустичними чи іншими способами.
Перш ніж перейти до конкретних методів та засобів вимірювань параметрів руху, нагадаємо назви засобів, призначених для вимірювань тих чи інших параметрів: велосиметр - прилад для вимірювань швидкості при лінійному переміщенні досліджуваного об'єкта; тахометр - прилад для вимірювань кутової швидкості обертання вала; спідометр - прилад для вимірювань швидкості поступального руху та довжини пройденого шляху (переміщення); акселерометр - прилад для вимірювань прискорення; віброакселерометр - прилад для вимірювань параметрів вібрацій (амплітуди вібрацій та віброприскорень).
Діапазон вимірюваних швидкостей дуже широкий - від часток мікрометра за секунду (осідання шахтних покрівель) до космічних швидкостей (8...12) ∙ 103 м/с і від часток оберту за секунду до понад 5 000 об/с; прискорень - від 10-5 до 20 000 м/с2.
Вимірювання параметрів лінійного руху
Для вимірювань параметрів лінійного руху відносними методами широко використовуються контактні методи та засоби вимірювань лінійних та кутових переміщень, зокрема, метод обкочування, різні спектрометричні методи. Суть методу обкочування полягає в тому, що для вимірювань переміщень (пройденого шляху) транспортними засобами додаються дискретні переміщення, які визначаються довжиною обводу кола. Тут лінійне переміщення обводу кола перетворюється в кутове переміщення для подальшого перетворення за допомогою контактного "щупа" чи індукційного перетворювача в одиничні імпульси (наприклад, за кожний оберт кола) та додавання лічильником імпульсів).
|
|
|
У різних галузях техніки поширеними методами вимірювань параметрів лінійного руху є так звані інерціальні методи. В основі застосування цих методів лежить фундаментальна властивість тіл - властивість інерції. За допомогою інерціальних засобів вимірювань вимірюють лінійне прискорення твердого тіла та інші зв'язані з прискоренням параметри лінійного руху. Необхідно, однак, зауважити, що внаслідок еквівалентності інерційної та гравітаційної мас вихідний сигнал подібних засобів вимірювань пропорційний, строго кажучи, не інерційному прискоренню, а так званому позірному (уявному) як геометричній різниці інерційного та гравітаційного прискорень. Правда, коли вимірюються горизонтальні прискорення, а прискорення вільного падіння спрямоване у цьому випадку перпендикулярно до вимірюваного, впливом гравітаційного прискорення нехтують.
В основі методів вимірювань параметрів лінійного руху твердого тіла лежить вимірювання сили інерції, пропорційної його масі та прискоренню:
Fін = ma.
Для вимірювань лінійного прискорення вибирають деяку "інерційну" масу m, з'єднану з досліджуваним об'єктом і вимірюють її силу інерції. Для вимірювань змінних прискорень з частотами від одиниць герц до десятків кілогерц найчастіше застосовуються п'єзоелектричні перетворювачі, для вимірювань сталих та низькочастотних прискорень - перетворювачі інерційної дії.
Для вимірювань прискорень поступального руху з похибкою 1... 5 % використовують звичайно давачі прямого перетворення маятникового або пружинного типів. В маятникових акселерометрах інерційна маса підвішена на штивному стержні і може повертатися довкола осі кріплення (як маятник), а протидійний момент може створюватись спіральною пружиною чи електромеханічним способом у системах зрівноважувального перетворення. В пружинних перетворювачах інерційна маса кріпиться на вільному кінці пружини, яка і створює протидійний момент.
Для вимірювань малих лінійних прискорень від часток g (g = 9,8,w/c2- прискорення вільного падіння) до декількох g застосовуються маятникові перетворювачі. Вторинними перетворювачами в таких засобах звичайно є диференціальні ємнісні перетворювачі, увімкнені у відповідні плечі незрівноваженого трансформаторного моста змінного струму. Для підвищення точності маятникових акселерометрів вони будуються за схемою зрівноважувального перетворення. Похибка таких акселерометрів може бути зведена до 0,05... 0,1 %, а поріг чутливості 10-4 g.
Принцип дії маятникового перетворювача зрівноважувального перетворення можна охарактеризувати так. За наявності вимірюваного прискорення, на інерційну масу буде діяти сила інерції Fx = m , що приводить до відхилень від початкових значень ємностей перетворювальних елементів ємнісного диференціального перетворювача і розбалансу мостового кола. Напруга розбалансу моста після підсилення подається на вхід фазочутливого випрямляча, а його вихідна напруга надходить на вхід магнітоелектричного зворотного перетворювача, який розвиває компенсувальну силу Fk спрямовану назустріч силі інерції. Покази міліамперметра можуть бути проградуйовані в одиницях вимірюваної величини.
, що приводить до відхилень від початкових значень ємностей перетворювальних елементів ємнісного диференціального перетворювача і розбалансу мостового кола. Напруга розбалансу моста після підсилення подається на вхід фазочутливого випрямляча, а його вихідна напруга надходить на вхід магнітоелектричного зворотного перетворювача, який розвиває компенсувальну силу Fk спрямовану назустріч силі інерції. Покази міліамперметра можуть бути проградуйовані в одиницях вимірюваної величини.
Якщо вимоги до точності вимірювань невисокі, використовують маятникові перетворювачі прямого перетворення, зокрема з диференціальними ємнісними перетворювачами. В таких акселерометрах мірою вимірюваної величини є напруга розбалансу моста, у який ввімкнений диференціальний ємнісний перетворювач. Недоліком таких схем є дуже малий діапазон вимірювань через не лінійність функції перетворення, а похибка таких акселерометрів знаходиться в границях декількох процентів.
Вимірювання параметрів вібрацій
Під вібрацією розуміють механічні коливання об'єкта у певних границях. Параметрами вібрацій є амплітуда, швидкість та прискорення центру маси досліджуваного об'єкта. Коливання можуть мати характер:
- детермінованих процесів, тобто процесів, які підпорядковуються певному математичному законові і повторюються в часі;
- стохастичних процесів, тобто безладних процесів, які не описуються математично і визначаються випадковою послідовністю різних причин. Ми зупинимося лише на визначенні параметрів детермінованих, а точніше синусоїдних процесів.Для визначення параметрів вібрацій при синусоїдних коливаннях досліджуваного об'єкта можуть бути використані методи та засоби вимірювань параметрів лінійного руху. Однак повинні бути враховані особливості роботи цих засобів у динамічному режимі.
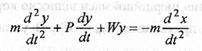
Вичерпною характеристикою динаміки роботи віброперетворювача є його диференціальне рівняння, яке для класичної інерціальної системи, що складається з інерційної маси т, закріпленої до пружини з питомим протидійний моментом W при наявності заспокоювача з коефіцієнтом заспокоєння Р має вигляд:
 .
.
тут y - переміщення інерційної маси.
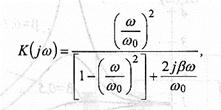
Для синусоїдного вхідного сигналу х = Xmsin t, на основі диференціального рівняння можна визначити комплексний коефіцієнт перетворення, амплітудно-частотну та фазочастотну характеристики
t, на основі диференціального рівняння можна визначити комплексний коефіцієнт перетворення, амплітудно-частотну та фазочастотну характеристики
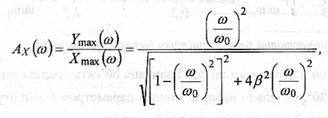
звідки відносна амплітуда вібрацій
а відносна амплітуда вібраційного прискорення
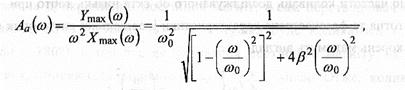
де ω- частота коливань досліджуваного об'єкта; ω0 - частота власних незагасаючих коливань інерційної маси; β - ступінь заспокоєння.
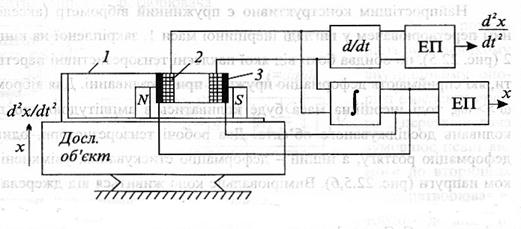
Рис.7. Схема індуктивного віброакселерометра
Здебільшого для вимірювань амплітуди вібрацій, швидкості та прискорення використовують один і той же первинний перетворювач (інерціальну систему) з використанням для визначення окремих параметрів інтегрально диференціального зв'язку між ними.
Прикладом такого віброакселерометра може бути індукційний віброакселерометр (рис. 7), принцип роботи якого такий. На плоскій пружині 1 закріплена вимірювальна котушка 2, яка одночасно виконує роль інерційної маси. До корпусу віброперетворювача прикріплений постійний магніт, а сам перетворювач кріпиться до досліджуваного об'єкта. Якщо котушка буде коливатись за законом y(t) = Xmaxsin(ω - 180°), в той час як коливання постійного магніту, як і досліджуваного об'єкта, описуються рівнянням xm(t) == Xmax sint. Отже, коливання вимірювальної котушки щодо магніту будуть здійснюватись за синусоїдним законом з амплітудою 2 Xmax.
Внаслідок коливань вимірювальної котушки в полі постійного магніту в котушці буде наводитись ЕРС, пропорційна швидкості коливань.
Отже, вихідною величиною індукційного віброперетворювача є швидкість коливного руху досліджуваного об'єкта. Для одержання показів вихідного вимірювального приладу в одиницях вимірюваного прискорення використовують проміжну диференціювальну ланку, а для побудови віброметра - інтегрувальну ланку (рис. 7).
Для розширення частотного діапазону в бік низьких частот та підвищення точності використовується зворотний зв'язок. Сигнал з виходу інтегратора подається на вхід компенсаційної котушки 3, механічно з'єднаної з вимірювальною котушкою. Компенсаційний струм, взаємодіючи з полем постійного магніту, створює компенсувальну силу, спрямовану назустріч силі інерції, зменшуючи амплітуду коливань інерційної маси при наближенні частоти коливань досліджуваного об'єкта до резонансної частоти інерціальної системи.
Розглянутий віброакселерометр призначений для роботи в частотному діапазоні 20...500 Гц, похибка не перевищує 1 %.
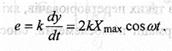
Не зупиняючись на особливостях конструкції, принцип дії п'єзоелектричного акселерометра може пояснити рис. 8. При прискореному русі закріпленого до досліджуваного об'єкта акселерометра (у цьому випадку в напрямі його вертикальної осі на п'єзоелемент 1 буде діяти сила Fx= m(dx2/dt2), де m - маса інерційного елемента; (dx2/dt2) - вимірюване прискорення досліджуваного об’єкта. Під дією цієї сил п'єзоелемент деформується і в ньому виникають механічні напруження  .
.
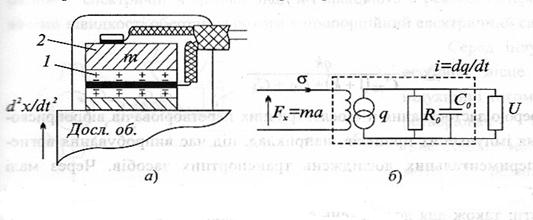
Рис. 8. П'єзоелектричний перетворювач акселерометра та його
еквівалентна електрична схема
Це механічне напруження спричинює появу на обкладках п'єзоелемента електричного заряду q = diKFx, де diK - п'єзомодуль, значення якого залежить від матеріалу п'єзоелемента та форми його зрізу. Еквівалентна ітектрична схема такого перетворювача наведена на рис. 8,б, де R0 і C0 - еквівалентний опір та еквівалентна ємність перетворювача.
2.5.10. Вимірювання параметрів обертового руху
Швидкість обертання елементів машин, пристроїв та агрегатів є однією з характеристик досліджуваного об'єкта. Нерідко вона визначає динамічні та теплові напруження в машинах. Технічні тахометри повинні забезпечувати похибку вимірювання звичайно не більше ніж 1,5...2 %, а при вимірюванні швидкості обертання в енергетичних установках ця похибка не повинна перевищувати 0,3...0,5 %.
Швидкість обертання визначається кількістю обертів за хвилину п (об/хв), що зв'язана з частотою обертання f, як

Найпоширенішими є такі методи вимірювання частоти обертання: відцентрові механічні, в яких чутливий елемент реагує на відцентрову силу, що розвивається незрівноваженими масами рухомого вала; електричні постійного, змінного чи імпульсного струму, основані на залежності генерованої напруги від частоти обертання, а для змінного та імпульсного струму - залежність частоти струму від частоти обертання; магніто - індукційні, основані на залежності наведених в металевому тілі вихрових струмів ви частоти обертання; індукційні, основані на законі електромагнітної індукції; фотоелектричні, що базуються на модуляції світлового потоку елементами обертання; стробоскопічні та інші. Відцентрові тахометри прості та надійні. З їх допомогою можна проводити вимірювання кутових швидкостей включно до 1000 об/хв. Їх основними недоліками є недистанційність, порівняно велика похибка (до 10 %), низький поріг чутливості.
Первинними перетворювачами електричних (генераторних) тахометрів є тахогенератори - електричні мікромашини, що працюють в режимі генератора і є перетворювачами швидкості обертання ротора в пропорційний електричний сигнал.
Індукційні тахометри
Серед індукційних тахометрів особливе місце займають імпульсні індукційні тахометри. Первинний перетворювач такого тахометра (рис. 9,а) має вимірювальну обмотку 1, розміщену на сталевому ярмі 2, через яке замикається магнітний потік постійного магніту 3. Рухомою частиною є феромагнітний зубчастий диск 5, який кріпиться до вала, оберти якого вимірюють.
Рис.9. Індукційний тахометр
При обертанні вала зубчастий виступ 4 диска (індуктора), проходячи біля розімкненої частини ярма, зменшує повітряний проміжок між рухомим феромагнітним диском та нерухомою частинами магнітопроводу, що призводить до зміни магнітного потоку І наведення у вимірювальній обмотці ЕРС.
 ,
,
де FM- магніторушійна сила постійного магніту; RM- магнітний опір магнітного кола.
Для наведеної конструкції імпульсного індукційного перетворювача ЕРС, що виникає у вимірювальній обмотці, буде мати вигляд двошлярних імпульсів, частота яких дорівнюватиме частоті проходження виступів. диска (зубців) попри розімкнену частину ярма, тобто частоті обертання вала

де р — кількість виступів індуктора; n - частота його обертання, об/хв.
Крім частотного інформативного параметра, інформативним параметром вихідного сигналу може бути і вихідна ЕРС.
З певним наближенням можна вважати, що амплітуда вихідних імпульсів
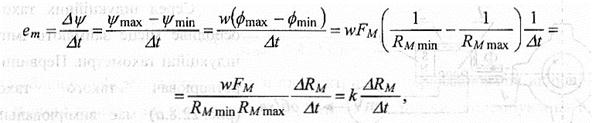
де ΔRM = RMmin – RMmax - зміна магнітного опору за рахунок зміни довжини повітряного проміжку; Аг-сталий коефіцієнт.
Для наближеної оцінки ет можна вважати, що
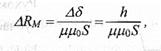
де ∆δ = h - зміна довжини повітряного проміжку між індуктором та ярмом при обертанні індуктора, яка дорівнює висоті зубця h; μ— магнітна проникність повітря; S – площа поперечного перерізу зубця.
Своєю чергою
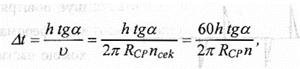
де υ, Rcp - лінійна швидкість переміщення та середній радіус зубців індуктора, nсек = n/60 кількість обертів індуктора за секунду; α - кут нахилу зубців.
Підставивши значення ∆Rмта ∆t у вираз для еm і враховуючи незалежність конструктивних та технологічних параметрів перетворювача від значення вимірюваної величини, запишемо

де S - крутизна АЧХ перетворювача.
Похибки індукційних тахометрів з частотним виходом визначаються лише похибкою вимірювання частоти.
В індукційних тахометрах з вихідним параметром у вигляді ЕРС, яка пропорційна до швидкості переміщення котушки лише за умови, що індукція В постійна зпродовж всього шляху переміщення. Непостійність індукції викликає виникнення похибки. Похибка таких тахометрів також багато в чому залежить від струму, який споживає вторинний перетворювач. Проходячи по вимірювальній обмотці індукційного перетворювача, цей струм створює магнітне поле, яке згідно з правилом Ленца спрямоване назустріч до напрямку основного поля і має розмагнічувальну дію. Внаслідок цього сумарна індукція зменшується, зменшується і ЕРС перетворювача.
Прилади з гіроскопічними перетворювачами
Особливу групу приладів для вимірювань параметрів обертового руху становлять прилади з гіроскопічним первинним перетворювачем. Ці прилади характеризуються автономністю, високою точністю, що і забезпечило їм широке застосування, зокрема, в навігації.
В основу принципу дії гіроскопа закладена властивість тіл, що обертаються з великою швидкістю (сотні обертів за секунду), зберігати незмінним при відсутності зовнішніх моментів напрям вектора моменту кількості руху (моменту імпульсу) в інерціальній системі відліку,
що дає можливість використати цей напрям як опорний. Іншою важливою властивістю гіроскопа є здатність здійснювати прецесію вектора моменту імпульсу при дії на ротор гіроскопа зовнішнього моменту сил. Прикладом гіроскопа може бути звичайна дзиґа.
Основні положення щодо принципу дії гіроскопа пояснює рис. 10. Якщо до осі ротора гіроскопа, що обертається з кутовою швидкістю  відносно осі Z, прикласти пару сил, момент яких M=Fyh то тіло повертатиметься на певний кут не тільки навколо осі X, що очевидно, але й навколо перпендикулярної до неї осі Y. Кутова швидкість цього додаткового руху , який називається прецесією, визначається за формулою Ω =M/J(тут J -момент інерції гіроскопа відносно осі Z).
відносно осі Z, прикласти пару сил, момент яких M=Fyh то тіло повертатиметься на певний кут не тільки навколо осі X, що очевидно, але й навколо перпендикулярної до неї осі Y. Кутова швидкість цього додаткового руху , який називається прецесією, визначається за формулою Ω =M/J(тут J -момент інерції гіроскопа відносно осі Z).
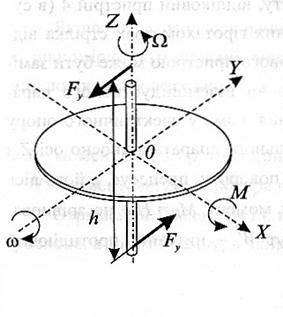
Рис. 10. До принципу дії гіроскопа
Кутова швидкість прецесії в мільйони разів менша за кутову швидкість обертання гіроскопа, а її напрям при заданих напрямках векторів моменту пари сил М та власного моменту імпульсу гіроскопа Н = Jвизначається як на рис.10.
Практичне застосування знайшли гіроскопи з горизонтальною віссю обертання. Гіровузол такого перетворювача здебільшого є трифазним асинхронним двигуном з короткозамкнутим ротором, що закріплений в рамках карданного підвісу (створені конструкції гіроскопів, в яких карданний підвіс, замінений електростатичними або магнітними підвісами). Якщо літальний апарат, на якому знаходиться гіроперетворювач, здійснює поворот, то виникає момент сил, що діє на гіроскоп і рамка разом з гіроскопом буде відхилятись відносно площини, в якій виконується поворот літального апарата, на деякий кут. Кут відхилення осі гіроскопа буде мірою кутової швидкості розвороту літального апарата.
Прилади для вимірювання таких кутових швидкостей називають, гіротахометрами. Принцип роботи такого гіротахометра ілюструє рис. 11.
Рис. 11.До принципа дії гіротахометра
Тут позначені ротор 1, що обертається з кутовою швидкістю Ω рамка 2, пружина З для створення протидіючого моменту, відліковий пристрій 4 (в сучасних гіротахометрах стрілка відлікового пристрою може бути замінена рухомими елементами реостатного, індуктивного чи взаємошдуктивного параметричного перетворювача для перетворення переміщення в зміну електричного опору чи індуктивності) та заспокоювач 5. При розвороті літального апарата відносно осі Z з кутовою швидкістю гіроскоп, реагуючи на швидкість повороту, прецесує, а його вісь буде відхилятись на деякий кут  доки гіроскопічний момент Мг = Hне зрівноважиться протидіючим моментом пружини MПР=W
доки гіроскопічний момент Мг = Hне зрівноважиться протидіючим моментом пружини MПР=W (тут W - питомий протидіючий момент).
(тут W - питомий протидіючий момент).
Спробуємо детальніше пояснити суть цього ефекту. Ротор гіроскопа, обертаючись з кутовою швидкістю Ω має момент імпульсу Н=ΩJ. Якщо, окрім того, ротор повертається разом з рамкою, в якій він закріплений, з кутовою швидкістю , то на нього діє так звана сила Коріоліса FK. Коріолісова сила - сила інерції, якого враховується вплив обертання системи відліку (основи, на якій закріплена рамка з ротором) на рух матеріальної точки в цій системі (ротор гіроскопа можна вважати сумою рухомих матеріальних точок), визначається формулою
де m - маса точки; v - її відносна кутова швидкість; ω - кутова швидкість обертання ситеми відліку.
Напрям сили Fk визначається так, як ілюструє рисунок, тобто в точці M вона діє у взаємно перпендикулярній до векторів v і площині.
Для обертального руху імпульс mv можна виразити через момент імпульсу матеріальної точки
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 608; Нарушение авторских прав?; Мы поможем в написании вашей работы!