КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Rotational dynamics
|
|
|
|
We have seen that torque and angular momentum are the rotational analogs of force and linear momentum. Since F = d p / dt one could make a good guess at the relationship between τ and ℓ. Naturally we feel more secure in deriving it. The angular momentum of a single particle is ℓ = r × p, and therefore its rate of change with time is*
 = r ×
= r ×  p + r × p = r × F + m v × v
p + r × p = r × F + m v × v
where we have used v = d r /dt and p = m v. The first term is the torque, whereas the second term vanishes by definition of the vector product. We are left with
(Single particle)  (6.12)
(6.12)
The torque acting on a particle is equal to the time rate of change of its angular momentum. Note that both vectors τ and ℓ must be measured with respect to the same origin in an inertial reference frame. This equation is the rotational analog of F = d p /dt.
SYSTEM OF PARTICLES
|
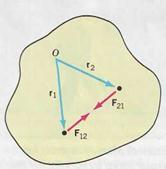
| FIGURE 6.11 |
When we dealt with the dynamics of systems of particles, we saw that only external forces had to be considered; the internal forces between the particles cancel in pairs. A similar cancellation occurs with internal torques (see Fig. 6.11), which means that the rotational motion of a system is determined only by external torques. If the i th particle experiences an external force F i and has linear momentum p i, then the torque on it is τ i = r i × F i and its angular momentum is ℓ i = r i × p i. Since Eq. 12.8 applies to each particle, for the whole system we have
(System of particles) τ EXT = L (6.13)
where τ EXT = ∑ τ i is the net external torque on the system and L = ∑ ℓ i is the total angular momentum of the particles. Equation 12.9 is the general equation for the rotational motion of any system and is the rotational analog of FEXT = d P /dt. It is valid only when both the torque and the angular momentum are measured (i) with respect to the same origin in an inertial frame, or (ii) relative to the center of mass of the system—even if this point is accelerating.
For the special case of a rigid body rotating about a fixed axis we know from Eq. 6.13 that the component of L along the axis is L = Iω. Since I is constant, dL / dt = I dω / dt = Iα, so Eq. 12.9 takes the (scalar) form
(Rigid body, fixed axis) τ = Iα (6.14)
which we used in Chapter 11.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 356; Нарушение авторских прав?; Мы поможем в написании вашей работы!