КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системи SCADA
 |
Модуль
Розділ 2.6:
Тема: Автоматизовані системи контролю і керування
План:
1. Централізовані, децентралізовані,інтелектуальні системи контролю і керування.
2. Система стандарту SCDA.
3. Інтерфейсні системи і засоби передачі інформації
4. Загалні відомості про телемеханічні системи.
Термін часу: 90 хв.
1. В узагальненому вигляді автоматична система керування може бути представлена в наступному вигляді:
Узагальнена структура автоматичної системи керування
    Переробка
інформації
Обчислювальна
машина
(контроллер) Переробка
інформації
Обчислювальна
машина
(контроллер)
|
| Технологічний процес |
 |  |
| Отримання інформації контрольно-вимірювальними приладами | Використання інформації Виконавчими механіз-мами |
Існує два принципові підходи до організації управління складними мережами: централізовані і децентралізовані ( розподілені). У свою чергу децентралізованниє системи бувають однорівневі і багаторівневі.
Централізована система керування.
Централізоване управління здійснюється з єдиного центру управління мережею, в який стікається вся інформація управління від всіх керованих об'єктів. Перевагою централізованого управління є концентрація всієї інформації в одному вузлі управління; цілісна картина про стан об’єктів. Але в той же час вона і менш надійна, оскільки при виході зі строю центрального органу -управління повністю порушується.
При великій розосереджене сумарні витрати (вартість технічних засобів, витрати на заробітну плату, вартість матеріалів) на великих АСУ ТП знижуються удвічі при переході до децентралізованной структури.
Перевагою централізованої структури є досить проста реалізація процесів інформаційної взаємодії; принципова можливість оптимального управління системою в цілому; досить легка корекція оперативно змінних вхідних параметрів; можливість досягнення максимальної експлуатаційної ефективності при мінімальній надмірності технічних засобів управління. При однорівневій централізованій структурі управління складним об'єктом здійснюється з одного пункту управління. Такі системи застосовують в основному для управління відносно простими об'єктами, розташованими на невеликій території.
|
|
|
При централізованій структурі управління в автоматизованій системі всі вимірювальні сигнали з керованого об'єкту передаються в одну - центральну ЕОМ, яка переробляє отриману інформацію і видає дії, що управляють, всім ланкам об'єкту.
Першим і найбільш важливим недоліком централізованої структури є велика трудомісткість переробки всієї потрібної інформації в єдиному центральному органі.Тут потрібно не лише переробити інформацію, що поступає від об'єктів, але і прийняти оптимальне рішення, що пов'язане з великим числом багатоваріантних розрахунків для різних ситуацій, відповідних стану об'єктів і довкілля; число необхідних розрахунків таке велике, що з ним не впорається жодна найсучасніша обчислювальна машина.
Недоліки централізованої структури наступні: необхідність високої надійності і продуктивності технічних засобів управління для досягнення прийнятної якості управління; висока сумарна протяжність каналів зв'язку за наявності територіальної розосередженості об'єктів управління.
Дентралізована система керування.
Децентралізоване управління мережею характеризується відсутністю єдиного центру управління мережею. Його функції перерозподіляються між безліччю систем управління мережею.
Перевагою такого підходу є: живучість системи управління;
|
|
|
відсутня необхідність у високопродуктивних серверах;
менші в порівнянні з централізованим підходом об'єми оброблюваної інформації і трафік службової інформації.
До недоліків даного підходу слід віднести:
-складність розмежування «зон відповідальності»;
-складність управління правами адміністраторів мережі;
-відсутність цілісної картини побудови мережі;
-суперечність рішень, що приймаються.
Інтелектуальною системою (ІС).
Систему, здатну вирішувати інтелектуальні завдання, називають інтелектуальною системою (ІС).
До числа основних інтелектуальних завдань за аналогією з діяльністю людини можна віднести задачі розпізнавання (образів, ситуацій, станів), навчання і планування поведінки (прийняття рішень). У цьому плані інтелектуальними називають ще системи, що володіють здатністю до навчання і зміни своєї поведінки в результаті навчання.
В даний час розвиток науки й техніки сягнув такого рівня, коли стає вже реальним створення штучного інтелекту, або точніше, моделювання (імітація) можливостей і здібностей людини, а рішення зазначених основних завдань за допомогою програмних і апаратних засобів.
Основною властивістю природних ІС є їх здатність до адаптації при зміні умов функціонування.
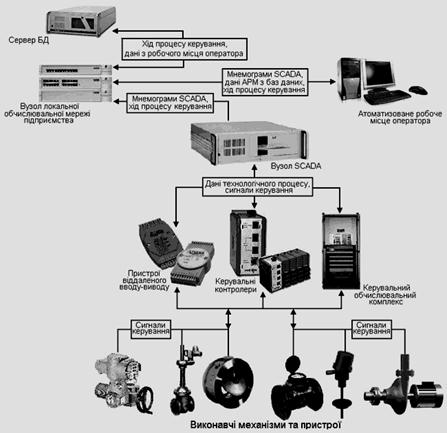
Диспетчерське управління і збір даних (SCADA – Supervisory Control And Data Acquisition - система збору даних і оперативного диспетчерського управління) є основним і в даний час залишається найбільш перспективним методом автоматизованого управління складними системами (процесами) в життєво важливих і критичних з точки зору безпеки і надійності областях. Вживання scada-технологій дозволяє досягти високого рівня автоматизації в рішенні завдань розробки систем управління, збору, обробки, передачі, зберігання і відображення інформації. Саме на принципах диспетчерського управління будуються крупні автоматизовані системи в промисловості і енергетиці, на транспорті, в космічній і військовій областях, в різних державних структурах. SCADA – процес збору інформації реального часу з віддалених об'єктів для обробки, аналізу і можливого управління віддаленими об'єктами.
Вимоги в обробці реального часу обумовлена необхідністю доставки (видачі) всіх необхідних даних на центральний інтерфейс оператора (диспетчера). Диспетчер в багаторівневій автоматизованій системі управління технологічними процесами отримує інформацію з монітора ЕОМ впливає на об'єкти, що знаходяться від нього на значній відстані за допомогою телекомунікаційних систем, контролерів, інтелектуальних виконавчих механізмів.
|
|
|
Повнота і наочність інформації, що представляється на екрані, доступність "важелів" управління, зручність користування підказками і довідковою системою і так далі - підвищує ефективність взаємодії диспетчера з системою і зводить до нуля його критичні помилки при управлінні.
Управління технологічними процесами на основі систем SCADA стало здійснюватися в передових західних країнах в 80-і роки. Сфера застосування охоплює складні об'єкти електро- і водопостачання, хімічні, нафтохімічні і нафтопереробні виробництва, залізничний транспорт, транспорт нафти і газу і ін. Велике значення при впровадженні сучасних систем диспетчерського управління має вирішення наступних завдань:
- вибору scada-систем (виходячи з вимог і особливостей технологічного процесу);
- кваліфікованого персоналу.
Програмні продукти класу SCADA широко представлені на світовому ринку. Це декілька десятків SCADA – систем. Найбільш популярні з них приведені нижче:
Intouch (Wonderware) - США;
Citect (CI Technology) - Австралія; FIX (Intellution) - США;
Genesis (Iconics Co) - США;
Factory Link (United States Data Co) - США;
RealFlex (BJ Software Systems) - США;
Sitex (Jade Software) - Великобританія;
Функціональні можливості системи.
-автоматизована розробка, що дає можливість створення програмного забезпечення (ПО) системи автоматизації без реального програмування;
-засоби збору первинної інформації від пристроїв нижнього рівня;
- засоби управління і реєстрації сигналів про аварійні ситуації;
- засоби зберігання інформації з можливістю її поста-обробки (як правило реалізується через інтерфейси до найбільш популярних баз даних);
- засоби обробки первинної інформації;
-засоби візуалізації представлення інформації у вигляді графіків, гістограм і т.п.; -возможность роботи прикладної системи з наборами параметрів, що розглядаються як єдине ціле (recipe, або установки). Основу більшості scada-пакетів складають декілька програмних компонентів (база даних реального часу, введення-виводу, передісторії, аварійних ситуацій) і адміністраторів (доступу, управління, повідомлень).
|
|
|
Переважна більшість scada-систем реалізована на платформах MS Windows.
Схема керування технологічним процесом з використанням SCADA – систем
3. Інтерфейсні системи і засоби передачі інформації
В давнину застосовувалися такі способи сигналізації, як дим, бій барабанів, сигналізація прапорами на морі (наприклад, прапори міжнародного зведення сигналів), що діють на відстані багатьох кілометрів. Проте, довгий час не існувало способу передачі інформації на відстані дальші, окрім передачі носія інформації (у вигляді гінця, листа і т. д.) Однієї з ранніх (кінець XVIII століття) технологій систем зв'язку був оптичний телеграф.
Однією з ранніх (кінець XVIII століття) технологій систем зв'язку був оптичний телеграф. Згодом він був витіснений електричним телеграфом, а потім і телефоном. Системи цифрового зв'язку розвиваються з 1960-х років.
Засобі передачі інформації
Залежно від середовища передачі даних лінії зв'язку розподіляються на:
-супутникові;
-повітряні;
-наземні;
-підводні;
-підземні.
За типом передачі сигналу розрізняють аналоговий і цифровий зв'язок.
Аналоговий зв'язок — це передача безперервних повідомлень (наприклад, звуку або мови).
Цифровий зв'язок — це передача інформації в дискретній формі (цифровому вигляді). Проте, дискретні повідомлення можуть передаватися аналоговими каналами і навпаки. В даний час цифровий зв'язок витісняє аналоговий, оскільки аналогові сигнали можуть бути представлені дискретними і після передачі перетворені назад без втрат.
У процесі передачі сигналу можуть відбуватися зміни в передачі сигналів. Це відбувається внаслідок наступних перетворень сигналу:
Обмеження — вилучення з передачі однієї або декількох частин сигналу без збереження інформації, яка містилася у вилучених частинах. Наприклад, обмеження мовного каналу діапазоном 300—3400 Гц.
Трансформація — зміни одного або декількох вимірів за рахунок зміни іншого або інших вимірів із збереженням незмінного об'єму (як в кубика пластиліну). Наприклад, зменшити час передачі можна, збільшивши ширину спектру сигналу або динамічний діапазон, або і те, і інше.
Компандування — включає два процеси, від яких пішла назва: компресія (стискування) і експандування (розширення). На передавальній стороні відбувається стискування сигналу в одному або декількох вимірах, на приймальні — відновлення.
Наприклад, «вилучення» пауз в мові на передавальній стороні і відновлення на приймальній.
Ланцюг зв'язку — провідники, використовувані для передачі одного сигналу. Розрізняють кабельний ланцюг — ланцюг в кабелі і повітряний ланцюг — підвішена на опорах.
Лінія зв'язку (ЛЗ) — фізичне середовище, по якому передаються інформаційні сигнали апаратури передачі даних і проміжної апаратури.
Лінія містить одну і більше ланцюгів зв'язку. Сигнал діє в лінії називається лінійним (від слова лінія).Розрізняють т два основні типи ЛЗ:
- лінії в атмосфері (радіолінії РЛ)
- направляючі лінії передачі (лінії зв'язку).
Канал зв'язку - це сукупність технічних засобів, які забезпечують передачу сигналів (інформації) від джерела до Ії приймача. До каналу зв’язку поряд з лінією зв’язку входять приймально - передавальна апаратура і пристрої зв’язку.
Канали можна розділити на безперервні (аналогові) і дискретні (цифрові).
Канал зв'язку може бути:
сімплексний — тобто що допускає передачу даних лише в одному напрямі, приклад — радіотрансляція, телебачення;
напівдуплексний — тобто що допускає передачу даних в обох напрямах по черзі;
дуплексним — тобто що допускає передачу даних в обох напрямах одночасно, приклад — телефон.
Розділення (ущільнення) каналів
Створення декількох каналів на одній лінії зв'язку забезпечується за допомогою того, що розноситься їх по частоті, часу, кодам, адресі, довжині хвилі. частотне розділення каналів (ЧРК, FDM) — розділення каналів по частоті, кожному каналу виділяється певний діапазон частот тимчасове розділення каналів (ВРК, TDM) — розділення каналів в часі, кожному каналу виділяється квант часу (таймслот)
кодове розділення каналів (КРК, CDMA) — розділення каналів по кодах, кожен канал має свій код накладення якого на груповий сигнал дозволяє виділити інформацію конкретного каналу. спектральне розділення каналів (СРК, WDM) — розділення каналів по довжині хвилі Можливо комбінувати методи, наприклад ЧРК+ВРК і т.
Стандартним є цифровий канал 64 Кбіт/с, який також називається елементарним каналом цифрових телефонних мереж.
Залежно від того, що переносить повідомлення, по фізичних принципах, лежачих в основі ліній зв'язку, можна виділити наступних типів зв'язку:
1. Дротяний і кабельний зв'язок — передача ведеться уздовж направляючого середовища.
1. 1. Дротяна - вита пара (що частково пригнічує електромагнітне випромінювання інших джерел). Швидкість передачі до 1 Мбіт/с. Використовується в телефонних мережах і для передачі даних.
1.2. Коаксіальний кабель. Швидкість передачі 10-100 Мбіт/с - використовується в локальних мережах, кабельному телебаченні і так далі.
2. Зв'язок по електричному кабелю.
3. Волоконно-оптичний зв'язок. Швидкість передачі 1 Гбіт/с.
4. Радіозв'язок — для передачі використовуються радіохвилі в просторі. ДВ-, СВ-, КВ- і УКВ-зв'язок без вживання ретрансляторів
5. Супутниковий зв'язок — зв'язок із застосуванням космічного ретранслятора(ов)
6. Радіорелейний зв'язок — зв'язок із застосуванням наземного ретранслятора(ів)
7. Стільниковий зв'язок — зв'язок з використанням мережі наземних базових станцій.
Волоконо-оптична зв'язок — вигляд дротяного електрозв'язку, що використовує як носія інформаційного сигналу електромагнітне випромінювання оптичного (ближнього інфрачервоного) діапазону, а як направляючі системи — волоконо-оптичні кабелі. Завдяки високій частоті, що несе, і широким можливостям мультиплексування, пропускна спроможність волоконно-оптичних ліній багато разів перевищує пропускну спроможність всіх інших систем зв'язку і може вимірюватися терабітами в секунду. Мале загасання світла в оптичному волокні дає можливість застосування волоконно-оптичного зв'язку на значних відстанях без використання підсилювачів. Волоконно-оптичний зв'язок вільний від електромагнітних перешкод і не доступний для несанкціонованого використання — перехопити сигнал, який передається по оптичному кабелю неможливо.
У основі волоконно-оптичного зв'язку лежить явище повного внутрішнього віддзеркалення електромагнітних хвиль на кордоні розділу діелектриків з різними показниками заломлення. Оптичне волокно складається з двох елементів — серцевини, що є безпосереднім світлопроводом, і оболонки. Показник заломлення серцевини дещо більше показника заломлення оболонки, завдяки чому промінь світла поширюється в серцевині, не покидаючи її.
Сфера застосування. Волоконно-оптичний зв'язок знаходить усе більш широке вживання у всіх областях — від комп'ютерів і бортових космічних, літакових і корабельних систем, до систем передачі інформації на великі відстані, наприклад, в даний час успішно використовується волоконно-оптична лінія зв'язку Західна Європа — Японія, велика частина якої проходить по території Росії. Крім того, збільшується сумарна протяжність підводних волоконно-оптичних ліній зв'язку між континентами.
Радіоканали наземного і супутникового зв'язку утворюються за допомогою передавача і приймача радіохвиль. Існує велика кількість різних типів радіоканалів тих, що відрізняються як використовуваним частотним діапазоном, так і дальністю каналу. Діапазони коротких, середніх і довгих хвиль (KB, СВ і ДВ) забезпечують телекомунікацію, але при невисокій швидкості передачі даних. Швидкісними є канали, що працюють на діапазонах ультракоротких хвиль (УКВ), для яких характерна частотна модуляція (Frequency Modulation, FM), а також діапазонах надвисоких частот (СВЧ або microwaves). У діапазоні СВЧ (понад 4 ГГц) сигнали вже не відбиваються іоносферою Землі і для стійкого зв'язку потрібна наявність прямої видимості між передавачем і приймачем. Тому такі частоти використовують або супутникові канали, або радіорелейні канали, де ця умова виконується.
Особливістю направляючих ліній зв'язку є те, що поширення сигналів в них від одного абонента (станції, пристрою, елементу схеми і т. д.) до іншого здійснюється лише по спеціально створених ланцюгах і трактах ЛС, створюючих направляючі системи, призначені для передачі електромагнітних сигналів в заданому напрямі з належною якістю і надійністю. Вищезгадані особливості РЛ і ЛЗ визначають їх основні властивості і сфери застосування.. Так, РЛ використовуються для здійснення зв'язку на різні відстані, часто між абонентами, що знаходяться в рухомому відносно один одного стані. Характер поширення електромагнітних сигналів в різних середовищах в першу чергу залежить від частоти радіосигналу (частоти, що несе). Відповідно до цього розрізняють наступні типові діапазони довжин хвиль і радіочастот: Наддовгі хвилі (СДВ)
Довгі хвилі (ДВ)
Середні хвилі (СВ)
Короткі хвилі (КВ)
Ультракороткі хвилі (УКВ)
Дециметрові хвилі (ДЦМ)
Сантиметрові хвилі (СМ)
Міліметрові хвилі (ММ)
Окрім вказаних вище переваг радіоліній,(можливість встановлення зв'язку на величезній відстані з рухомими об'єктами), відзначимо ще високу швидкість зв'язку, а також можливість забезпечення передачі масовим засобам інформації (радіомовлення і телебачення) з необмеженим числом слухачів і глядачів. Основними недоліками РЛ є:
-залежність якості зв'язку від стану;
-середовища передачі і сторонніх електромагнітних полів;
- низька швидкість;
-недостатньо висока електромагнітна сумісність в діапазоні метрових хвиль і вище;
-складність апаратури передавача і приймача.
Супутникові ретранслятори
Супутниковий зв'язок — один з видів радіозв'язку, заснований на використанні штучних супутників землі як ретранслятори. Супутниковий зв'язок здійснюється між земними станціями, які можуть бути як стаціонарними, так і рухливими. Супутниковий зв'язок є розвитком традиційного радіорелейного зв'язку шляхом винесення ретранслятора на дуже велику висоту (від сотень до десятків тисяч км.). Оскільки зона його видимості в цьому випадку — майже половина Земної кулі, то необхідність в ланцюжку ретрансляторів відпадає — в більшості випадків досить і одного.
5. Загальні відомості про телемеханічні системи.
5.1. Якщо відстань між об’єктом керування і керуючим пристроєм велика, то застосовується технічні засоби зв’язку і системи автоматики перетворюються в системи
т е л е м е х а н і к и. Отже, особливістю телемеханіки є наявність пристроїв для передачі керуючої і контролюючої інформації на значні відстані.
Засоби телемеханіки поділяються на пристрої пункту керування ПК і пристрої контрольованого пункту КП. Їх сукупність називається телемеханічним комплексом.
Система телемеханіки являє собою сукупність телемеханічного комплексу, датчиків, засобів обробки інформації, диспетчерського обладнання і каналів зв’язку. /КС/ які виконують задачу централізованого контролю і керування територіально екоцентрованими об’єктами.
Функціональна схема системи ТК.
| Джерело інформації | розподілювач | передатчик | Канал зв’язку | приймач | збирач | Одержувач інформації | ||||||||
| перешкоди | ||||||||||||||
5.2. Всі телемеханічні системи виконують такі функції:
Телевимірювання – призначені для вимірювання контрольних параметрів об’єкта. ТВ. (рівень води в баці).
Телесигналізація ТС – для сигналізації про стан контрольованого об’єкта.(звукова, світлова, про стан технологічного процесу і аварійний стан).
Телекерування ТК – може здійснюватися по розімкненому (програмне керування або замкненому циклу). Інформацію передають у вигляді команд, які постає диспетчер. Телесигналізацію і телевимірювання об’єднують в телеконтроль.
Сигнал – це носій інформації з нанесеним на нього повідомлення, або інформація.
Повідомлення – все те що передається про хід виробничого процесу.
Інформація – та частина повідомлення, яка являє собою новизну, про яку раніше не повідомлялось.
|
|
 | |
| |
 |
Системи телемеханіки обслуговують як стаціонарні так і рухомі об’єкти (трактори, комбайни).
Передача сигналів телемеханіки здійснюється до стаціонарних об’єктів за допомогою провідних ліній зв’язку, а до рухомих – за допомогою радіозв’язку на коротких і ультракоротких хвилях.
5.3. Для підвищення перешкодостійкості і ущільнення ліній зв’язку застосовується кодування. При цьому різні сигнали будуються як умовні комбінації імпульсів, що відрізняється один від одного яким – не будь параметром: амплітудою, полярністю, (напрямом струму), тривалістю, частотою коливань.
Полярна ознака – суть полягає в зміні напрямку струму в лінії зв’язку перемиканням полюсів лінійної батареї. Приймачем полярних сигналів є поляризоване реле (а).
Часова ознака – полягає в різній тривалості струму або паузи (б).
Амплітудна ознака – характеризується подачею імпульсів електричного струму різної амплітуди (в).
Частотна ознака – полягає в тому, що різниця між імпульсами створюється різними частотами змінного струму від різних генераторів сигналів. Перевагою частотної ознаки є можливість одночасного посилання декількох імпульсів, кожний з яких має свою частоту (мало піддається впливу перешкоді). (г).
 | |


 а)
а)




 б)
б)
 | |||
 |

 в)
в)

г)
Л1. СТ253-273.
Самостійна робота: Загальні відомості про системи телемеханіки
ЛІТЕРАТУРА
1. Мартиненко І.І., Основи автоматики. –Київ,Вища школа-1980-168с.;
2. Колесов Л.В., Основи автоматики. М.,Колос 1980г.-266с;
3. Бородин И.Ф.., Кирилин Н.И. Основи автоматики, М.,”Колос.”,1977г.
4. Бородин И.Ф..,Технические средства автматики-М.: Клос,1982.-303с
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 924; Нарушение авторских прав?; Мы поможем в написании вашей работы!