КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронные машины
|
|
|
|
6.1 Назначение, принцип действия и устройство асинхронной машины.
а) Назначение.
Бесколлекторная машина переменного тока, у которой в установившемся режиме магнитное поле, участвующее в основном процессе преобразования энергии, и ротор вращаются с разными частотами, называется асинхронной.
В настоящее время асинхронные машины (АМ) применяются в основном как электродвигатели для преобразования электрической энергии в механическую. Они могут работать также в режимах трансформаторов, электромагнитных тормозов, преобразователей частоты и др.
Их мощность колеблется в широких пределах – от долей Ватта до многих тысяч киловатт.
Машины мощностью до 0.5 кВт обычно выполняют одно- или двухфазными.
В промышленных электроустановках наибольшее распространение получили трехфазные асинхронные двигатели (ТАД), работа которых основана на использовании вращающегося магнитного поля статора.
б) Принцип действия асинхронного двигателя.
В обмотке статора машины, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле. Магнитное поле пересекает проводники обмотки ротора и наводит в них (на основании закона электромагнитной индукции e=Blv) переменную ЭДС, направление которой определяется правилом правой руки. Поскольку обмотка замкнута, ЭДС вызывает в ней ток того же направления.
В результате взаимодействия тока ротора с вращающимся магнитным полем (на основании закона Ампера F=BlI) возникает сила, направление которой определяется правилом левой руки. Сила создает момент, действующий в ту же сторону.
Под действием момента ротор приходит в движение и после разбега вращается в том же направлении, что и магнитное поле, но с несколько меньшей частотой вращения, чем поле:
|
|
|
n = (0,92÷0,98)n0
Основная сила, вызывающая момент вращения, возникает в результате взаимодействия магнитного поля ротора с вращающимся магнитным полем статора и приложена к зубцам ротора. На проводник действует только небольшая сила. Однако, для анализа работы двигателя и для получения расчетных уравнений обычно считают, что в основе принципа действия асинхронного двигателя лежит закон Ампера – взаимодействия проводника с током и магнитного поля.
в) Устройство АМ
АМ состоит из неподвижного статора и вращающегося внутри него ротора (рис. 6.1). Между статором и ротором имеется воздушный зазор, величина которого зависит от номинальной мощности машины и ее быстроходности.
Статор содержит наружную часть – станину 1’’, внутри которой запрессован сердечник 1’ и подшипниковые щиты 3. Станина с подшипниковыми щитами образует корпус машины, который может быть стальным, чугунным, а при небольшой мощности может быть выполнен из алюминиевого сплава.
Сердечник статора для уменьшения потерь по аналогии с трансформатором собран из тонких листов стали, изолированных слоем лака. Сердечник представляет собой полый цилиндр с продольными внутренними пазами, в которых уложена обмотка. Обмотка трехфазных двигателей состоит из трех ветвей – фаз. Каждая фаза содержит 1, 2 и более катушек, равномерно распределенных по окружности статора.
Начало и концы фаз выводятся на щиток машины 6. Это позволяет соединять их звездой или треугольником (рис. 6.2) и подключать к сетям с различными напряжениями указанными в паспортах машины. Здесь С1, С2, С3 – начала, а С4, С5, С6 – концы фаз.
У двигателей, предназначенных для регулирования частоты вращения ротора методом изменения числа пар полюсов, начала и концы катушек выводят на щиток.
|
|
|
Ротор АМ выполняется в виде цилиндра, состоящего из тонких изолированных листов электротехнической стали. В сердечнике ротора имеются пазы, в которых размещена обмотка.
Рис.6.1 Асинхронный двигатель с короткозамкнутым ротором: а - общий вид, б - в разобранном виде, 1'-сердечник, 1''- станина, 2 - ротор, 3 - подшипниковые щиты, 4 - замыкающие кольца, 5 - вентиляционные каналы, 6 - распределительная коробка, 7 - обмотка статора
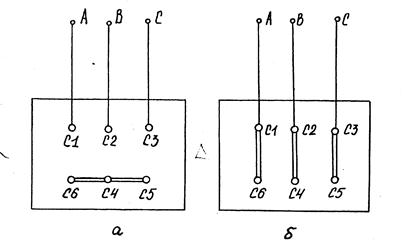
Рис. 6.2 Соединение обмоток на щитке машины: а - звездой; б - треугольником.
В зависимости от конструкции ротора различают машины с коротко замкнутым (рис.6.1б) и фазным (рис.6.3) роторами. У машины с короткозамкнутым ротором обмотка выполняется в виде короткозамкнутой обмотки или «беличьей клетки».
Зачастую пазы заливают алюминием с одновременной отливкой замыкающих колец и лопаток вентилятора. У машин с фазным ротором (Рис 6.4) обмотка выполняется разомкнутой. Концы обмоток соединены в одну точку, а их начала (Р 1, Р 2, Р 3) электрически подключены (будучи изолированными от вала) к трем контактным кольцам 2, находящимся на изоляционной втулке вала машины. На кольца накладываются щетки 3, к которым присоединяют пусковой или регулировочный реостат 4.
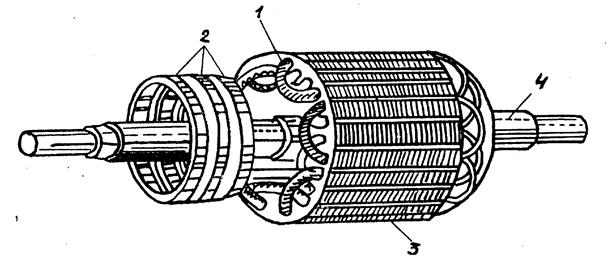
Рис6.3 Фазный ротор асинхронного двигателя: 1 - обмотка; 2 - кольца; 3 - сердечник; 4 - вал.
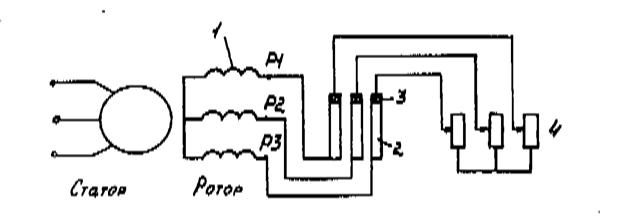
Рис.6.4 Электрическая схема цепи ротора фазного двигателя: 1 - обмотка; 2 - кольца; 3 - щетки; 4 - реостат.
6.2 Скольжение, частота тока в роторе.
Частота вращения магнитного потока статора в пространстве (ее еще называют синхронной)
 , (6.1)
, (6.1)
Где f 1 и p 1 – соответственно частота тока и число пар полюсов статора.
При промышленной частоте f 1=50 Гц частота вращения магнитного поля, в зависимости от числа пар полюсов будет иметь следующие значения:
| Частота вращения магнитного поля, n1 | ||||||
| Число пар полюсов, p |
Таким образом частота вращения магнитного потока зависит от частоты приложенного к обмотке статора напряжения и числа пар полюсов, создаваемых обмоткой статора.
Частоту вращения ротора обозначим n2. Тогда, исходя из принципа действия двигателя (по определению),
 ,
,
так как появление ЭДС и тока в обмотке ротора возможно только в том случае, если n 1≠ n 2.
|
|
|
Степень отставания от вращающегося магнитного потока называется скольжением АД.
Скольжение рассчитывается как отношение разности между частотой вращения магнитного поля и частотой вращения ротора к частоте вращения магнитного поля. (Магнитное поле статора берется в качестве нормирующего множителя!):
 , (6.2)
, (6.2)
где ω1, ω2 – угловые скорости вращения поля статора и ротора.
 ,
,
Разность частот вращения поля статора n 1 и ротора n 2 представляет собой частоту вращения магнитного поля статора относительно ротора
 .
.
Величина скольжения определяется нагрузкой на валу двигателя.
Во время холостого хода n 1≈ n 2 скольжение S очень мало и составляет доли процента(Sх =0,001÷0,005)
При идеальном холостом ходе, если не учитывать силу трения n 1= n 2 и Sхх =0
При пуске ротор неподвижен, т.е. n2 =0 и Sn =1
Таким образом, у двигателей скольжение меняется от 1 до 0.
Скольжение Sном соответствует номинальной нагрузке двигателя. Оно составляет 0,001-0,007 (меньшая величина относится к двигателям большой мощности, большая – к двигателям малой мощности). АД проектируют так, чтобы при номинальной нагрузке Sном ≈0,05.
Рис 6.5 Зависимость тока I2 от ротора от скольжения.
Из выражения (6.1) следует, что частота вращения n1 поля машины и частота тока f1 пропорциональны.
Частота тока ротора f2 будет определяться частотой вращения магнитного потока статора относительно ротора ns, поэтому
Заменив ns=n1-n2 и умножив числитель и знаменатель последнего выражения на n1, получим

или
 (6.3)
(6.3)
6.3 Режимы работы трёхфазной АМ
На Рис 6.6 приведена зависимость частоты вращения ротора от скольжения n(S)
Рис. 6.6 Зависимость частоты вращения ротора от скольжения n=f(S)
В зависимости от значения скольжения АМ может работать в режимах двигателя, генератора и электромагнитного тормоза.
В режиме двигателя (0<S<1) АМ является преобразователем электрической энергии в механическую. Ротор должен вращаться асинхронно – медленнее поля с такой частотой вращения, при которой токи в обмотке ротора при взаимодействии с магнитным полем статора создают момент, уравновешивающий тормозной момент на валу двигателя.
|
|
|
В режиме генератора (S<0) АМ является преобразователем механической энергии в электрическую. Ротор вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой вращения большей, чем частота вращения поля.
В режиме электромагнитного тормоза (S>1) ротор вращается в направлении противоположном направлению вращения магнитного поля, создаваемого токами в обмотках статора. В режиме электромагнитного тормоза в АМ рассеивается значительная энергия в обмотках, на гистерезис и вихревые токи.
6.4 Ток ротора асинхронной машины
Обмотка короткозамкнутого (или фазного) ротора АД представляет собой замкнутую цепь – рис 6.7 а, поэтому ток в фазе роторной обмотке равен
 (6.4)
(6.4)
Где R2 и X2S – активное и индуктивное сопротивления ротора
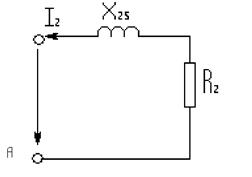
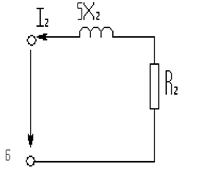
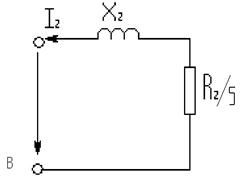
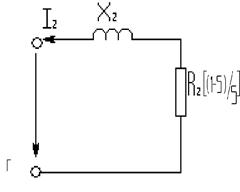
Рис.6.7. Этапы преобразования схемы ротора АД.
Действующая ЭДС
ü вращающегося ротора:
 Ф.
Ф.
ü заторможенного ротора:
 Ф.
Ф.
Сравнивая эти выражения, можно записать так:
Е 2S= SE2 (6.5)
Из последнего выражения (6.5) можно утверждать, что ЭДС вращающегося ротора может быть идентифицирована как ЭДС заторможенного ротора. Это производится путем введения в правую часть выражения (6.5) множителя “S”.
Индуктивное сопротивление обмотки ротора от потоков рассеяния:

( частота тока в роторе;
частота тока в роторе;  частота сети).
частота сети).
Тогда с учетом последней формулы можно записать
X 2S= SX2 (6.6)
Выражение тока в роторе (6.4), используя формулы (6.5) и (6.6), можно выразить через ЭДС E2 и индуктивное сопротивление заторможенного ротора не зависящие от скольжения S (рис. 6.7 в):
 (6.7)
(6.7)
Выражение (6.7) выражает замену вращающегося ротора заторможенным при сохранении тока в роторе равного значению тока во вращающемся роторе. При этом, согласно (6.7) следует считать индуктивное сопротивление ротора равным X2, а активное сопротивление ротора – равным  .
.
На схеме (рис. 6.7 в) показана схема замещения обмотки ротора, соответствующая выражению (6.7). Схема (рис. 6.7 г) совпадает со схемой замещения вторичной обмотки трансформатора, получена путем расщепления сопротивления R2/S на два сопротивления и полностью эквивалентна схеме рис. 6.7в. Потребляемая участком цепи с сопротивлением  , зависящим от скольжения S, электрическая мощность эквивалентна механической мощности двигателя.
, зависящим от скольжения S, электрическая мощность эквивалентна механической мощности двигателя.
При идеальном ХХ, когда S=0, сопротивление R= , что соответствует разрыву цепи ротора и отсутствию тока в его обмотке.
, что соответствует разрыву цепи ротора и отсутствию тока в его обмотке.
При неподвижном роторе, когда S=1, сопротивление R и ток в роторе достигает максимального значения.
и ток в роторе достигает максимального значения.
Действующий ток ротора:
 (6.8)
(6.8)
То, что ротор вращается, а частота его вращения изменяется, учитывается изменением активного сопротивления обмотки ротора  , которое оказывается зависящим от скольжения. Чем больше тормозной момент на валу двигателя, тем больше ее количество электроэнергии должно преобразоваться в механическую энергию. С увеличением тормозного момента частота вращения ротора уменьшается, а его скольжение увеличивается. При этом как видно из формулы (6.8) активное сопротивление обмотки ротора уменьшается, а ток ротора
, которое оказывается зависящим от скольжения. Чем больше тормозной момент на валу двигателя, тем больше ее количество электроэнергии должно преобразоваться в механическую энергию. С увеличением тормозного момента частота вращения ротора уменьшается, а его скольжение увеличивается. При этом как видно из формулы (6.8) активное сопротивление обмотки ротора уменьшается, а ток ротора  возрастает, что компенсируется увеличением тока статора. Это равнозначно увеличению потребляемой двигателем электрической мощности. Максимальное значение ток ротора имеет при
возрастает, что компенсируется увеличением тока статора. Это равнозначно увеличению потребляемой двигателем электрической мощности. Максимальное значение ток ротора имеет при  , т.е. при пуске двигателя, а минимальное значение – при
, т.е. при пуске двигателя, а минимальное значение – при  близких к нулю, т.е. в режиме холостого хода.
близких к нулю, т.е. в режиме холостого хода.
6.5 Схема замещения асинхронного двигателя.
Заменив двигатель с вращающимся ротором неподвижным, учитывая одинаковые частоты вращения потоков в пространстве, а также наличие только электромагнитных связей между ними, АМ можно рассматривать как трехфазный трансформатор. При этом первичной обмотке трансформатора соответствует обмотка статора, вторичной обмотке – обмотка ротора. Физическая сущность происходящих явлений в АД и трансформаторе при этом будет одинаковой.
Основой для рассмотрения схемы замещения АД является тот факт, что поле ротора вращается синхронно с полем статора, опережая при этом ротор, вращающийся медленнее поля.
Таким образом, магнитные поля статора и ротора по отношению друг к другу остаются неподвижными, что является характерным условием полной передачи энергии вращающимся полем. Оно служит таким же связующим звеном между обмотками статора и ротора, как и переменное магнитное поле в трансформаторе, передающее энергию от первичной ко вторичной обмотке.
Для обоснования схемы замещения преобразуем соответствующим образом основные уравнения состояния двигателя. Для этого все роторные величины приведем к числу витков, обмоточному коэффициенту и числу фаз статора подобно тому, как мы приводили величины, относящиеся к первичной обмотке, к соответствующим величинам второй обмотки.
ЭДС статора Е1 связана с ЭДС неподвижного эквивалентного ротора Е2Н соотношением:
 ,
,
где ke – коэффициент трансформации напряжений АМ.
Ток ротора I2 можно заменить приведенным током

где ki – коэффициент трансформации токов АМ
Произведение

есть коэффициент трансформации АМ.
Введем дополнительно в уравнение электрического состояния статора АД приведенные сопротивления цепи ротора:
kekiZоб2=Z1об2 и kekiR2=R12 и Х2=Х2keki
Элементы с такими сопротивлениями в цепи статора будут потреблять такую же энергию и при том же сдвиге фаз между током и напряжением, как это имеет место в соответствующих сопротивлениях цепи ротора.
Максимальная нагрузка двигателя заменяется эквивалентной электрической нагрузкой [(1-S)/S]R12, включенной в цепь ротора.
Переменное активное сопротивление обмотки приведенного ротора можно представить в виде суммы двух сопротивлений (рис. 6.8 а, б):
где  - активное сопротивление самой обмотки (обмотки неподвижного ротора).
- активное сопротивление самой обмотки (обмотки неподвижного ротора).
Потребляемая участком цепи с сопротивлением R1, зависящим от скольжения, электрическая мощность эквивалентна механической мощности двигателя.
 При идеальном ХХ, когда S=0, сопротивление
При идеальном ХХ, когда S=0, сопротивление  , что соответствует разрыву цепи ротора и отсутствию тока в его обмотке (I2=0). Ток I0 можно измерить, если посредством внешнего двигателя довести ротор до синхронной частоты вращения (S=0).
, что соответствует разрыву цепи ротора и отсутствию тока в его обмотке (I2=0). Ток I0 можно измерить, если посредством внешнего двигателя довести ротор до синхронной частоты вращения (S=0).
Рис.6.8. Схемы замещения: а), б) – ротора; в) – Т-образного двигателя; г) – Г-образного двигателя
При неподвижном роторе, когда S=1, сопротивление R1=0 и, как вследствие, ток в роторе достигает максимального значения. По этой причине опыт полной остановки двигателя именуется опытом короткого замыкания и осуществляется при сильно пониженном напряжении на статоре.
Во всех остальных случаях, когда 0<S<1, в элементе с сопротивлением R1 поглощается электрическая мощность, равная по значению механической мощности АД. Т.о., механическая мощность АД:
причем принимается в расчет число фаз статора m1, а не ротора m2, т.к. ток ротора и сопротивление его обмотки, приведены к обмотке статора.
Ветвь намагничивания Z 12, по которой протекает ток I0 (рис. 6.8 в), имеет:
ü активное сопротивление R , обусловленное потерями мощности в стальном сердечнике статора;
, обусловленное потерями мощности в стальном сердечнике статора;
ü индуктивное сопротивление Х , обусловленное вращающимся магнитным потоком.
, обусловленное вращающимся магнитным потоком.
В отличие от трансформатора ток ХХ I0 асинхронного двигателя настолько велик ( ), что пренебрегать сопротивлением ветви намагничивания нельзя.
), что пренебрегать сопротивлением ветви намагничивания нельзя.
Используя схему замещения, можно свести электромеханические процессы, протекающие в АД к электрическим.
Поглощаемая в элементе R1 электрическая мощность численно равна механической мощности Pмх (см. выше), развиваемой двигателем.
В практических расчетах чаще используют Г-образную схему замещения (рис. 6.8 г), в которой ветвь намагничивания вынесена на зажимы напряжения сети.
При холостом ходе:
R1= ,
, 
Ток статора I1=I0
Как в Т-образной, так и в Г-образной схемах ток I0 протекает по последовательно включенным элементам с сопротивлениями R1, X1,  ,
,  .
.
В рабочем режиме возникает ток I , который в элементах (Т- и Г-образных) замыкается по контуру, состоящему из одних и тех же элементов
, который в элементах (Т- и Г-образных) замыкается по контуру, состоящему из одних и тех же элементов  ,
,  ,
,  ,
,  ,
,  .
.
Ток статора для Т- и Г-образных схем:  .
.
В Г-образной схеме замещения (рис.6.8г):
 (6.9)
(6.9)
Эта схема является приближенной. Значения I, найденная по формуле (6.9) на 3-6% больше действительного значения тока. На значении I1 ошибка в вычислении Iсказывается еще меньше.
Коэффициенты приведения ke, ki, ток холостого хода и угол масштабных потерь, а также параметры ветви намагничивания определяются, как и в случае трансформатора, из опыта ХХ.
Параметры R1,R2, X1, X2 подсчитываются из опыта КЗ двигателя. Опыту КЗ соответствует случай заторможенного двигателя. При это к двигателю подводится такое напряжение, при котором в обмотке статора будет протекать номинальный ток I1ном.
6.6 Режим холостого хода асинхронного двигателя.
Под режимом холостого хода (ХХ) АД подразумевают такое его состояние, при котором к статору подведено номинальное напряжение, а ток в роторе равен нулю (обмотка ротора разомкнута и нагрузка на валу отсутствует).
Отношение ЭДС обмоток статора и ротора называют коэффициентом приведения АД по ЭДС.(коф. трансформации по напряжению-см.»Схема замещение АД»,Касаткин Немцов стр.352).
 (6.10)
(6.10)
Коэффициент приведения  отличается от коэффициента трансформации трансформатора наличием в отношении (6.10) обмоточных коэффициентов
отличается от коэффициента трансформации трансформатора наличием в отношении (6.10) обмоточных коэффициентов  и
и  статора и ротора, учитывающих наличие сдвига фаз между ЭДС витков катушек обмоток.
статора и ротора, учитывающих наличие сдвига фаз между ЭДС витков катушек обмоток.
Ток обмотки статора
Io=Iао+Ipo,
как и в трансформаторе, называется током холостого хода.
Его активная составляющая значительно меньше реактивной составляющей (Iао<Ipo).
Поэтому Io~Ipo, т.е. ток ХХ является намагничивающим, создающим вращающий магнитный поток.
По сравнению с намагничивающим током трансформатора той же мощности у двигателей он больше (достигает 20-25% от номинального тока). Это объясняется наличием воздушного зазора между статором и ротором машины, обусловливающего значительное возрастание магнитного сопротивление машины.
При замкнутой обмотке ротора без дополнительной механической нагрузки на валу (При холостом вращении) частота вращения ротора будет близкой к частоте вращения поля статора.
В отличие от трансформатора при холостом вращении двигателя в последнем, кроме электрических и магнитных потерь, возникают механические потери.
6.7.Нагрузочный режим АД,уравнение МДС и токов.
а) Нагрузочный режим
В случае холостого хода двигателя его механическая нагрузка обусловлена лишь силами трения в подшипниках и вентиляционными потерями (аэродинамикой вращающихся частотой).
При появлении на валу ротора дополнительной механической нагрузки ротор затормозится, увеличится скольжение и, следовательно, возрастут ЭДС и ток ротора.
Увеличение тока в роторе приведет к возрастанию его магнитодвижущей силы F2,которая по закону Ленца вызовет ослабление магнитного потока Ф о, созданного МДС холостого хода Fo.
Ослабление потока приведет к уменьшению Е1 и нарушению электрического равновесия между напряжением и ЭДС в цепи статора. Вследствие этого возрастает ток I1, который увеличит поток статора и тем самым скомпенсирует размагничивающие действие тока ротора I2.
В результате описанных выше переходных электромагнитных процессов установится общий магнитный поток Фо, равный потоку при ХХ двигателя, обусловленный разностью МДС статора и ротора.
Таким образом, величина результирующего магнитного потока, зависящая только от напряжение сети, в пределах до номинальной нагрузки останется почти без изменения. Поэтому:
Ф 1- Ф 2= Ф о, (6.11)
где Ф 1, Ф 2, Ф о – соответственно магнитные потоки статора, ротора и холостого хода.
Увеличение тока I1 в статоре вызовет увеличение мощности, передаваемой двигателю из сети, в результате чего возрастает вращающий момент и динамическое равновесие восстановится.
б) Свойства саморегулирования вращающего момента в соответствии с моментом нагрузки на валу АД.
АД, так же как и все остальные электрические машины, обладают свойством саморегулирования. Оно заключается в том, что при изменении противодействующего момента нагрузки автоматически изменяется вращающий момент машины и восстанавливается нарушенное равновесие моментов на валу.
Как известно – установившийся режим с постоянной скоростью возможен только при равенстве моментов на валу – электромагнитного вращающего М и противодействующего момента Мпр (Суммарного момента нагрузки и сил трения). Если внезапно увеличится противодействующий момент, то ротор начнет тормозиться. Скорость ротора n2 будет падать, а скорость его скольжения относительно вращающего поля  - возрастать. При увеличении скорость скольжения неизбежно увеличатся ЭДС Е2 и токи I2 в проводниках ротора.
- возрастать. При увеличении скорость скольжения неизбежно увеличатся ЭДС Е2 и токи I2 в проводниках ротора.
В свою очередь, ток ротора определяет электромагнитные силы и момент, действующие на ротор. С ростом вращающего момента отрицательное ускорение ротора будет стремиться к нулю, пока не наступит повторное равновесие моментов: скорость ротора установится на новом, более низком уровне.
Описанный переходной процесс можно характеризовать следующий математической (мнемонической) схемой:
 ;
; 
Понимание свойства саморегулирования – ключ к пониманию всех характеристик АМ.
в) Уравнение магнитодвижущих сил (МДС) и токов АМ.
Магнитные потоки замыкаются по одному и тому магнитопроводу, поэтому уравнение (6.11) можно переписать заменив соответствующими МДС:
 (6.12)
(6.12)
где: I1, I2,Io – токи обмоток статора, ротора и холостого хода;
w1, w2 – число витков обмотки статора и ротора;
Ко1, Ко2 – обмоточные коэффициенты обмотки статора и ротора;
m1, m2 –число фаз обмотки статора и ротора.
Разделив левую и правую части уравнение (6.12) на  , получим
, получим
Величина
 (6.13)
(6.13)
представляет собой коэффициент приведения по току. Коэффициенты ne и ni неодинаковы. Как и в случае трансформатора,  .
.
Этот коэффициент называют током ротора, приведенный к обмотке статора.
Окончательно уравнение (6.12) запишется в следующим виде:
 или
или  (6.14)
(6.14)
Таким образом, ток в обмотке статора состоит из намагничивающего тока и составляющей  , компенсирующей поток ротора. Составляющая появляется только тогда, когда к валу ротора приложен тормозящий момент.
, компенсирующей поток ротора. Составляющая появляется только тогда, когда к валу ротора приложен тормозящий момент.
Уточнения в соответствии с [Иванов, Равдоник, стр.272].
Магнитные потоки статора и ротора создаются их магнитодвижущими силами.
При ХХ АД магнитодвижущая ротора равна нулю и вращающийся поток создается только МДС статора, которая у двигателя равна  (m1 – число фаз статора, Io – ток ХХ двигателя) – все это повторяет схему замещения трансформатора.
(m1 – число фаз статора, Io – ток ХХ двигателя) – все это повторяет схему замещения трансформатора.
Если увеличить нагрузку на валу двигателя, то увеличится ток ротора и в нем появится  (m2 – число фаз ротора).
(m2 – число фаз ротора).
По аналогии с трансформатором, МДС ротора направлена противоположно МДС статора. Поэтому чтобы скомпенсировать МДС ротора, МДС статора должна увеличиваться.
Таким образом, геометрическая сумма МДС статора и ротора всегда будет равна МДС статора при холостом ходе:

Разделим на  и получим:
и получим:
 ; (6.13)
; (6.13)
ki=m2 kоб2 w2/(m1 kоб1 w1) (6.15)
Коэффициент ki называют коэффициентом трансформации двигателя по току.
Для двигателя с короткозамкнутым ротором  (число фаз неравно) и
(число фаз неравно) и  уравнения (6.13) примет вид:
уравнения (6.13) примет вид:
 или
или
 , (6.14)
, (6.14)
где  - приведенный ток ротора.
- приведенный ток ротора.
Ток статора из (6.14) окончательно равен:
 (6.16)
(6.16)
Ток статора, как и ток первичной обмотки трансформатора, имеет две составляющие: ток холостого хода Io, составляющий 40 – 60 % от номинального тока, и ток ротора обусловленный нагрузкой. Так как ток Х.Х. в 3-4 раза меньше тока статора при номинальной нагрузке, с грубым приближением можно записать  . (Это окажется полезным при выводе формулы вращающего момента АД).
. (Это окажется полезным при выводе формулы вращающего момента АД).
Большое значение тока Х.Х. обусловлено тем, что магнитный поток статора дважды пересекает воздушный зазор, обладающий большим магнитным сопротивлением, и, как следствие для создания достаточного магнитного потока требуется значительно большая МДС, чем у трансформатора. Основной в токе Х.Х. является намагничивающая составляющая, носящая индуктивный характер.
Составляющая тока ротора появляется только тогда, когда к роторному (валу) приложен тормозящий момент.
6.8 Вращающий момент асинхронного двигателя
Вращающий момент в AD создается в результате взаимодействия вращающего поля, Ф и тока в роторе I2.
Развиваемая электромагнитная мощность будет:
 =
= (6.15)
(6.15)
Полная механическая мощность, развиваемая ротором:
= =
=
Если параметры ротора приведены к статору, то электрическая мощность:
 =
=


Так как  =, то
=, то
=

Тогда
 , (6.16)
, (6.16)
где: - число фаз статора;
- число фаз статора;
 - приведенный ток в обмотке ротора;
- приведенный ток в обмотке ротора;
 =
= +
+ - активное сопротивление цепи ротора;
- активное сопротивление цепи ротора;
- приведенное активное сопротивление обмотки ротора;
- добавочное активное сопротивление, которое может быть введено в цепь обмотки ротора (в двигателях с фазным ротором).
Чтобы получить зависимость вращающего момента от параметров двигателя воспользуемся Г-образной схемой замещения асинхронного двигателя (рис.6.9.). Здесь намагничивающий контур С-Д вынесен на зажимы внешней сети А-В. Чтобы ток  остался без изменения, дополнительно введены сопротивления
остался без изменения, дополнительно введены сопротивления  и
и  . При таком изменении схемы ошибка незначительна, т. к. Е1 мало отличается от U1.
. При таком изменении схемы ошибка незначительна, т. к. Е1 мало отличается от U1.
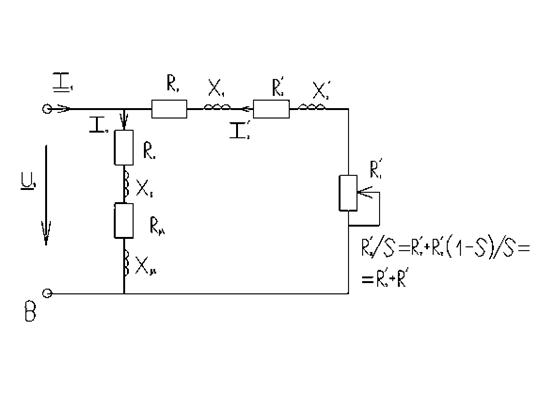
Рис.6.9 Г-образная схема замещения АД
Из схемы Замещения АД:
 (6.17)
(6.17)
Подставляя величину  в (6.16), получим
в (6.16), получим
Так как
 ,
,
то
 (6.18)
(6.18)
Параметры схемы замещения АМ  ,
,  ,
,  , и
, и  , входящие в выражение (6.18), являются косвенными, т.к. их значения при изменении нагрузки машины остаются практически неизменными. Постоянными можно считать также напряжение на обмотке фазы статора
, входящие в выражение (6.18), являются косвенными, т.к. их значения при изменении нагрузки машины остаются практически неизменными. Постоянными можно считать также напряжение на обмотке фазы статора  , и частоту
, и частоту  . В выражении момента М (6.18) единственная переменная величина – скольжение S, которое для различных режимов работы АМ может принимать значение в диапазоне от
. В выражении момента М (6.18) единственная переменная величина – скольжение S, которое для различных режимов работы АМ может принимать значение в диапазоне от  до
до  . Так как индуктивное сопротивление АД
. Так как индуктивное сопротивление АД  , а активным сопротивлением обмотки статора можно пренебречь и считать
, а активным сопротивлением обмотки статора можно пренебречь и считать
 , то (6.18) можно записать так
, то (6.18) можно записать так
 , (6.18а)
, (6.18а)
где:  .
.
Вращающий момент (6.18) прямо пропорционален квадрату напряжения сети  , поэтому АД весьма чувствителен к изменению напряжения.
, поэтому АД весьма чувствителен к изменению напряжения.
Например, при уменьшении напряжения сети на 10% относительно номинального ( ) электромагнитный момент двигателя уменьшается на 19%:
) электромагнитный момент двигателя уменьшается на 19%:  M=0,81М, где М- момент при номинальном напряжении сети, а
M=0,81М, где М- момент при номинальном напряжении сети, а  - момент при пониженном напряжении сети.
- момент при пониженном напряжении сети.
Исследуем зависимость вращающего момента  от скольжения при условии, что
от скольжения при условии, что  и частота
и частота  постоянны (
постоянны ( ,
,  ) и постоянны параметры схемы замещения. Эту зависимость принято называть механической характеристикой АМ.
) и постоянны параметры схемы замещения. Эту зависимость принято называть механической характеристикой АМ.
В момент пуска двигателя в ход скольжение равно единице ( ) и развиваемый двигателем пусковой момент равен
) и развиваемый двигателем пусковой момент равен
 (6.19)
(6.19)
т.е. величина пускового момента зависит от активного сопротивления обмотки ротора. Поэтому для увеличения пускового момента в цепь ротора вводят на время пуска пусковой реостат (для двигателей с фазным ротором).
На рисунке 6.10 приведена зависимость вращающего момента от скольжения при  ,
,  и
и  .
.
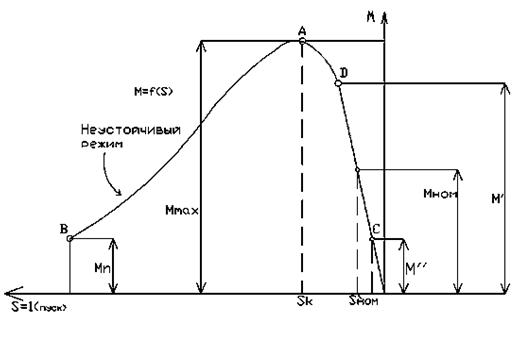
Рис. 6.10 Зависимость электромагнитного вращающего момента  .
.
Из анализа механической характеристики следует, что устойчивая работа АД возможна при скольжении меньше критического (S< ), т.е. на участке ОА - участке устойчивой работы. АВ - участок неустойчивой работы (
), т.е. на участке ОА - участке устойчивой работы. АВ - участок неустойчивой работы ( )- незначительное увеличение нагрузочного момента вызовет увеличение скольжения S, которое будет продолжаться до тех пор, пока S=1, т.е. пока ротор не остановится.
)- незначительное увеличение нагрузочного момента вызовет увеличение скольжения S, которое будет продолжаться до тех пор, пока S=1, т.е. пока ротор не остановится.
Если работа происходит на участке ОА, то при увеличении нагрузочного момента на валу двигателя скорость его вращения уменьшится, что приведет к увеличению скольжения  увеличится момент
увеличится момент  наступит динамическое равновесие.
наступит динамическое равновесие.
Если работа двигателя происходит на участке АВ, то увеличение нагрузочного момента на валу может вызвать остановку двигателя.
Таким образом, при достижении электромагнитным моментом максимального значения  наступает предел устойчивости работы АД, т.е. необходимо, чтобы сумма моментов, действующих на ротор, была меньше
наступает предел устойчивости работы АД, т.е. необходимо, чтобы сумма моментов, действующих на ротор, была меньше  .
.
Для определения значения максимального вращающего момента  следует найти величину
следует найти величину  , при которой наступает этот момент. Для этого возьмем производную
, при которой наступает этот момент. Для этого возьмем производную  и приравняем ее нулю. После преобразований получим:
и приравняем ее нулю. После преобразований получим:
 (6.20)
(6.20)
 - называется критическим скольжением.
- называется критическим скольжением.
Подставив значение критического скольжения (6.20) в выражение электромагнитного момента (6.18), после ряда преобразований получим выражение максимального момента [Н м]:
м]:
 (6.21)
(6.21)
В (6.20) и (6.21) знак “+” соответствует двигательному, а знак “-” – генераторному режиму работы АМ.
Для АМ общего назначения активное сопротивление обмотки статора намного меньше суммы индуктивных сопротивлений  <<
<<
Поэтому, пренебрегая величиной  , получим упрощенное выражение критического скольжения
, получим упрощенное выражение критического скольжения
 (6.22)
(6.22)
и максимального момента [Нм]
 (6.23)
(6.23)
В АД с фазным ротором можно получить максимальный момент при пуске. Для этого в цепь обмотки ротора включают такое пусковое сопротивление  , чтобы
, чтобы  ; при этом
; при этом  =1 (кривая 1 на фиг.6.11).
=1 (кривая 1 на фиг.6.11).
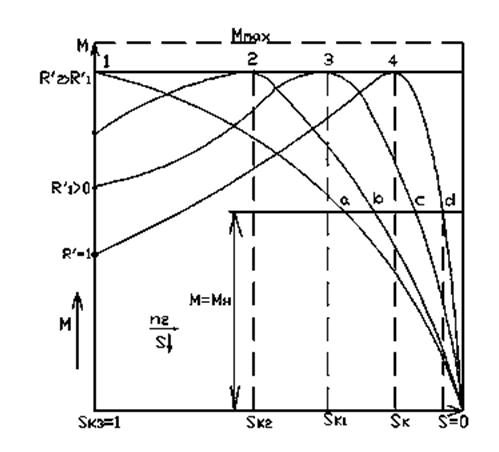
Рис.6.11 Характеристики моментов при различных значениях активного сопротивления цепи фазного ротора.
Каждому значению активного сопротивления ротора соответствует своя характеристика  . В процессе пуска, когда пусковой реостат постепенно выводится, двигатель постепенно переходит с одной характеристики на другую. Если бы реостат не выводился, то момент изменялся бы по кривой 1 и устойчивая работа, например, при номинальном моменте
. В процессе пуска, когда пусковой реостат постепенно выводится, двигатель постепенно переходит с одной характеристики на другую. Если бы реостат не выводился, то момент изменялся бы по кривой 1 и устойчивая работа, например, при номинальном моменте  соответствовала бы точке “а”, т.е. двигатель имел бы пониженную скорость вращения.
соответствовала бы точке “а”, т.е. двигатель имел бы пониженную скорость вращения.
Основным параметром, характеризующий данный двигатель, является номинальный момент  , т.е. момент, развиваемый при номинальной скорости вращения. Другими важнейшими характеристиками двигателя являются
, т.е. момент, развиваемый при номинальной скорости вращения. Другими важнейшими характеристиками двигателя являются  и
и  .
.
Применение формул (6.18) и (6.18а) для расчета механических характеристик АД не всегда возможно, т.к. параметры схемы замещения двигателя обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы заложено допущение, что активное сопротивление обмотки статора  , при этом
, при этом
 (6.24)
(6.24)
Критическое скольжение определяется по формуле
 (6.25)
(6.25)
где  - перегрузочная способность
- перегрузочная способность  . Расчет механической характеристики намного упрощается, если его вести в относительных единицах:
. Расчет механической характеристики намного упрощается, если его вести в относительных единицах:  . В этом случае уравнение механической характеристики имеет вид:
. В этом случае уравнение механической характеристики имеет вид:
 (6.26)
(6.26)
Применение упрощенной формулы (6.26) наиболее целесообразно при расчете рабочего участка механической характеристики при скольжении  , т.к. в этом случае величина ошибки не превышает значений, указанных в ТУ.
, т.к. в этом случае величина ошибки не превышает значений, указанных в ТУ.
При скольжении  ошибка составляет 15-17%
ошибка составляет 15-17%
6.12. Энергетическая диаграмма и коэффициент полезного действия асинхронного двигателя.
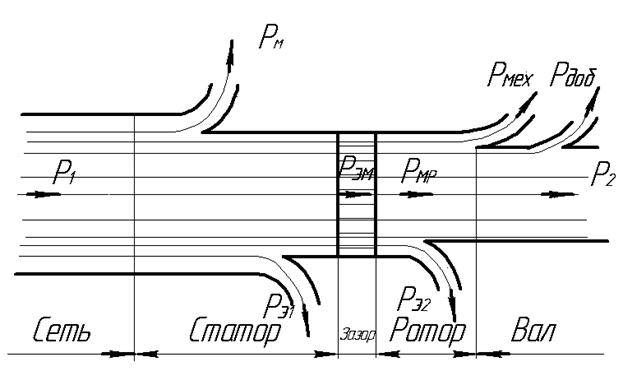
Рис. 6.20. Энергетическая диаграмма АД
К обмотке статора подводится электрическая мощность

В статоре двигателя возникают электрические потери в обмотке  и магнитные потери
и магнитные потери  в стали. Остальная электромагнитная мощность
в стали. Остальная электромагнитная мощность  передаётся ротору электромагнитным путём, т.е. вращающимся магнитным полем:
передаётся ротору электромагнитным путём, т.е. вращающимся магнитным полем:
 .
.
В обмотке ротора возникают электрические потери мощности  , и полная механическая мощность, развиваемая ротором:
, и полная механическая мощность, развиваемая ротором:
 .
.
Механическая мощность на валу двигателя (полезная мощность)  меньше полной механической мощности
меньше полной механической мощности  механических потерь
механических потерь  и добавочных потерь
и добавочных потерь  :
:
 .
.
Коэффициент полезного действия АД:
 .
.
К.п.д. работающего АД составляет  .
.
Чем больше мощность АД, тем выше К.п.д.
Замечания к энергетической диаграмме:
1. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери в АД вызваны потерями на гистерезис и вихревые токи, происходящими в сердечнике при его перемагничивании.
Величина магнитных потерь пропорциональна частоте перемагничивания:
 ,
,
где  .
.
Частота перемагничивания сердечника статора равна частоте тока сети  Гц, а частота перемагничивания сердечника ротора
Гц, а частота перемагничивания сердечника ротора  . При частоте тока в сети
. При частоте тока в сети  Гц и номинальном скольжении
Гц и номинальном скольжении  частота перемагничивания ротора
частота перемагничивания ротора  Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчётах не учитывают.
Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчётах не учитывают.
Электрические потери  и
и  в АД вызваны нагревом обмоток статора и ротора токами, проходящими по ним. Величины этих потерь (Вт):
в АД вызваны нагревом обмоток статора и ротора токами, проходящими по ним. Величины этих потерь (Вт):
электрические потери в обмотке статора:  ;
;
электрические потери в обмотке ротора:  .
.
Механические потери  – это потери на трение в подшипниках, щёточном узле и на вентиляцию. Величина этих потерь:
– это потери на трение в подшипниках, щёточном узле и на вентиляцию. Величина этих потерь:  .
.
Добавочные потери  включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах ротора и статора и другими причинами.
включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах ротора и статора и другими причинами.
2. Опыт ХХ позволяет определить и  :
:
 .
.
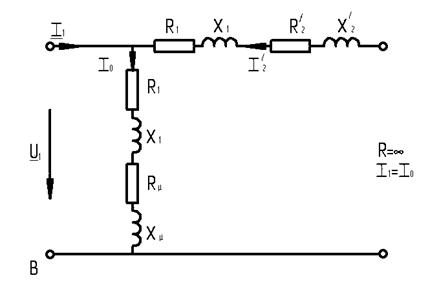
Рис.6.21. Эквивалентная электрическая схема холостого хода асинхронного двигателя.
Измеряют активную мощность  , потребляемую АD в режиме ХХ, которая включает электрические потери в обмотке статора
, потребляемую АD в режиме ХХ, которая включает электрические потери в обмотке статора  , магнитные потери в сердечнике статора
, магнитные потери в сердечнике статора  и механические потери
и механические потери  :
:
 .
.
3. Опыт КЗ позволяет определить мощность: 
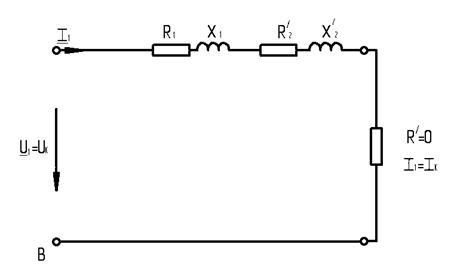
Рис.6.22. Эквивалентная электрическая схема опыта короткого замыкания асинхронного двигателя.
Ротор двигателя следует жёстко закрепить предварительно установив его в положение, соответствующее среднему току КЗ.
Измеряют активную мощность КЗ:  . По полученным значениям напряжений
. По полученным значениям напряжений  , токов
, токов  и мощностей
и мощностей  вычисляют следующие параметры:
вычисляют следующие параметры:
 ,
,
 :
:
полное сопротивление КЗ (Ом):
 ;
;  :
:
активные и индуктивные составляющие сопротивления (Ом).
6.13. Характеристики асинхронного двигателя.
1. Механическая характеристика.
Механической характеристикой называется зависимость частоты вращения двигателя от вращающего момента  при
при  . Её можно построить используя зависимость
. Её можно построить используя зависимость  и соотношения между n2 и S (
и соотношения между n2 и S ( или
или  ). Из формулы для скольжения (из круглой скобки) получаем, что скорость вращения ротора АD:
). Из формулы для скольжения (из круглой скобки) получаем, что скорость вращения ротора АD:
 ,
,
откуда видно, что частота вращения ротора n2 и скольжение являются линейно-зависимыми величинами (при n1=const). При S=1 n2=0, а при S=0 n2=n1. Следовательно, точке S=1 на оси абсцисс соответствует точка n2=0, т.е. начало оси для частоты вращения.
Совместив начала осей для момента M и частоты n2 и повернув оси на угол 90 по часовой стрелке, получим механическую характеристику AD (рис. 6.22).
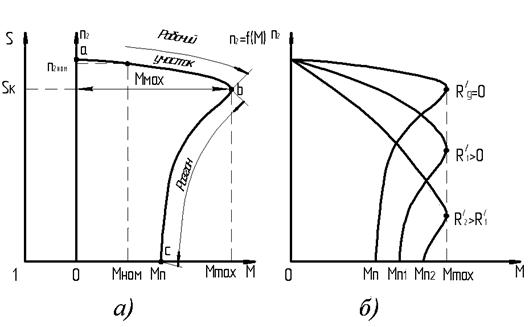
Рис.6.21. Механические характеристики асинхронного двигателя:
а) – с короткозамкнутым ротором; б) – с фазным ротором;
Точка «с» – начало пуска; «с-в» – разгон; «а-в» – рабочий участок.
На ней можно отметить максимальный момент  , пусковой момент
, пусковой момент  (момент при пуске двигателя, т.е. при
(момент при пуске двигателя, т.е. при  ); номинальный момент
); номинальный момент  , соответствующий номинальному режиму работы двигателя(ему соответствует номинальная частота вращения ротора
, соответствующий номинальному режиму работы двигателя(ему соответствует номинальная частота вращения ротора  , указываемая в паспорте двигателя).
, указываемая в паспорте двигателя).
Двигатель разгоняется в соответствии с механической характеристикой: разгон начинается с точки «с», затем проходит точка «в» и двигатель оказывается в установившемся режиме, т.е. вращается с частотой  на участке «а-в» в точке, соответствующей условию
на участке «а-в» в точке, соответствующей условию  (где
(где  - тормозящий момент). Т.к. точки характеристики на участке «в-с» соответствует разгону, а рабочим участком является участок «а-в», на котором при изменении вращающего момента от О до
- тормозящий момент). Т.к. точки характеристики на участке «в-с» соответствует разгону, а рабочим участком является участок «а-в», на котором при изменении вращающего момента от О до  частота вращения двигателя меняется мало. Такая механическая характеристика называется жесткой характеристикой.
частота вращения двигателя меняется мало. Такая механическая характеристика называется жесткой характеристикой.
Устойчивая работа двигателя, т.е. работа при  , возможна только на участке «а-в». Допустим, что в исходном режиме двигатель работает в точке “ a ’” механической характеристики (рис.6.23).
, возможна только на участке «а-в». Допустим, что в исходном режиме двигатель работает в точке “ a ’” механической характеристики (рис.6.23).
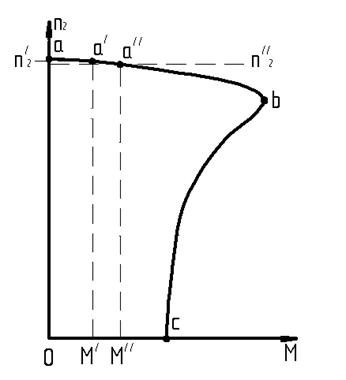
Рис.6.23 Механическая характеристика AD (для иллюстрации его устойчивой работы).
Т.е. имеет частоту вращения  и развивает вращающий момент
и развивает вращающий момент  . Если при этом увеличивается тормозной момент от
. Если при этом увеличивается тормозной момент от  до
до  , то возникает неравенство моментов:
, то возникает неравенство моментов:  . Т.к. тормозной момент становится больше вращающего момента, то ротор начинает тормозиться, увеличивается скольжение, Э.Д.С. и ток ротора, а, следовательно, увеличивается и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов:
. Т.к. тормозной момент становится больше вращающего момента, то ротор начинает тормозиться, увеличивается скольжение, Э.Д.С. и ток ротора, а, следовательно, увеличивается и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов:  =
= . При этом устанавливается постоянная частота вращения
. При этом устанавливается постоянная частота вращения  . Этим значениям на графике соответствует точка
. Этим значениям на графике соответствует точка  . При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке.
. При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке.
Таким образом, как бы не изменялся тормозной момент в пределах участка «а-в», двигатель может так изменить вращающий момент, что условие его устойчивой работы всегда сохранится. В этом заключается свойство внутреннего саморегулирования АD.
Когда тормозный момент становится равным максимальному, вращающий момент начинает уменьшаться и равенство становится невозможным – двигатель останавливается. Поэтому максимальный момент называют также ОПРОКИДЫВАЮЩИМ МОМЕНТОМ. Механическая характеристика АD при  (Рис. 6.22а) относится к коротко замкнутому ротору и называется ЕСТЕСТВЕННОЙ.
(Рис. 6.22а) относится к коротко замкнутому ротору и называется ЕСТЕСТВЕННОЙ.
2. Рабочие характеристики.
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения  , к.п.д., полезного момента (момента на валу)
, к.п.д., полезного момента (момента на валу)  , коэффициента мощности
, коэффициента мощности  и тока статора
и тока статора  от полезной мощности
от полезной мощности  при
при  и .
и .
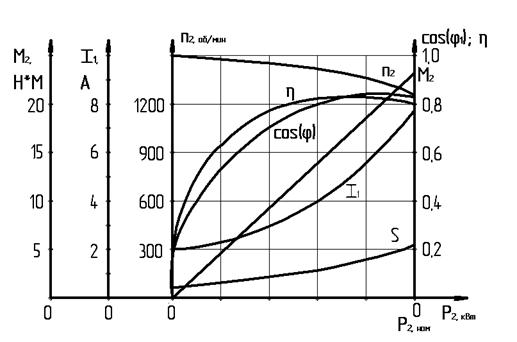
Рисунок 6.23 Рабочие характеристики АD.
Скоростная характеристика  .
.
Частота вращения ротора АD:
 .
.
Скольжение:
 .
.
(Электрические потери в роторе прямо пропорциональны скольжению:  , где электромагнитная мощность асинхронного двигателя), т.е. скольжение двигателя, а, следовательно и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности
, где электромагнитная мощность асинхронного двигателя), т.е. скольжение двигателя, а, следовательно и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности  .
.
Пренебрегая электрическими потерями в роторе в режиме холостого хода ( ), можно принять, что
), можно принять, что  и
и  . По мере увеличения нагрузки на валу двигателя отношение
. По мере увеличения нагрузки на валу двигателя отношение  растёт, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость
растёт, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость  представляет собой кривую слабо наклонённую к оси абсцисс. Однако, при увеличении активного сопротивления ротора
представляет собой кривую слабо наклонённую к оси абсцисс. Однако, при увеличении активного сопротивления ротора  угол наклона этой кривой увеличивается.
угол наклона этой кривой увеличивается.
Зависимость