КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгоритмы цифрового ПИД-регулирования
|
|
|
|
Цифровые регулЯторы и их настройка
Цифровые алгоритмы управления являются важнейшей составной частью программного обеспечения микропроцессорных контроллеров и управляющих вычислительных машин (УВМ). УВМ осуществляет опрос сигналов с датчиков, вычисляет значения управляющих сигналов по заданному закону регулирования, а затем выдает их на исполнительные механизмы. Период опроса (квантования) изменяется в зависимости от динамических параметров процесса от долей до нескольких десятков секунд.
В настоящее время наблюдается тенденция вытеснения аналоговых систем управления цифровыми. Объясняется это широкими возможностями по реализации самых совершенных алгоритмов регулирования, что, в свою очередь, гарантирует получение высокой точности и хорошего быстродействия в замкнутой системе непосредственного цифрового управления.
Наиболее распространенными алгоритмами являются ПИ и ПИД алгоритмы цифрового управления. При правильной настройке эти алгоритмы обеспечивают достаточно хорошее качество управления для большинства объектов промышленной технологии.
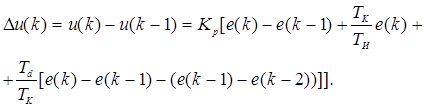
Рассмотрим процедуру вывода алгоритма цифрового ПИД- регулятора из соответствующего непрерывного закона, имеющего вид
 , (3.1)
, (3.1)
где  -ошибка регулирования.
-ошибка регулирования.
Запишем уравнение (3.1) в конечных разностях, путем замены 
 , (3.2)
, (3.2)
где  =1,2,3...- номер периода квантования,
=1,2,3...- номер периода квантования,  - величина периода квантования.
- величина периода квантования.
Отметим, что при достаточно малых периодах квантования цифровой ПИД закон управления обеспечивает почти такое же качество процессов управления, что и исходный непрерывный закон (3.1).
На практике вместо вычислений абсолютных значений управляющего сигнала удобней вычислять его приращения  на каждом такте. В этом случае становится возможным использовать этот алгоритм для управления объектами, оснащенными как пропорциональным так и интегрирующими исполнительными механизмами. В результате получаем так называемый скоростной алгоритм управления, полностью эквивалентный исходному
на каждом такте. В этом случае становится возможным использовать этот алгоритм для управления объектами, оснащенными как пропорциональным так и интегрирующими исполнительными механизмами. В результате получаем так называемый скоростной алгоритм управления, полностью эквивалентный исходному
|
|
|
 (3.3)
(3.3)
Или, приведя подобные члены, получим
 (3.4)
(3.4)
где обозначено
 , (3.5)
, (3.5)
Структурная схема цифрового ПИД регулятора приведена на рис. 3.1., где через  обозначен блок задержки сигнала на один
обозначен блок задержки сигнала на один
период квантования.
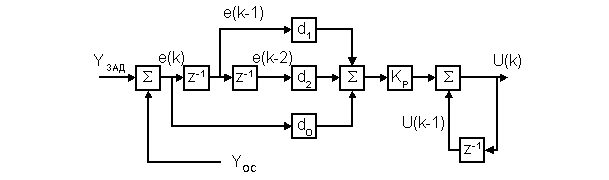
Рис. 3.1. Структурная схема скоростного ПИД-регулятора
Алгоритм работы всей системы управления при использовании цифровой модели объекта будет иметь вид
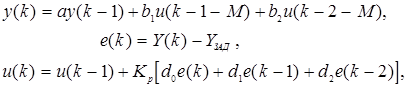
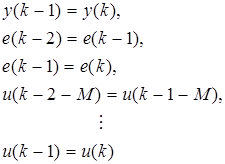
При этом параметры цифровой модели объекта управления в координатах “вход - выход” находятся путем взятия модифицированного Z-преобразования от передаточной функции объекта первого порядка с запаздыванием, что приводит к следующим формулам

 , (3.6)
, (3.6)
где  ,
,  - целая часть отношения,
- целая часть отношения,  - дробная часть.
- дробная часть.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1548; Нарушение авторских прав?; Мы поможем в написании вашей работы!