КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реализация оптимального регулятора
|
|
|
|
Реализация оптимального закона управления (4.29) затрудняется наличием функциональных составляющих в его структуре. С целью упрощения реализации полученного закона найдем его изображение по Лапласу от всех составляющих
 (4.33)
(4.33)
где L [] - символ преобразования по Лапласу.
Для нахождения изображений по Лапласу функциональных составляющих воспользуемся формулой свертки, согласно которой свертыванию оригиналов во временной области соответствует произведение их изображений
 , (4.34)
, (4.34)
Здесь знак  - означает операцию свертывания оригиналов.
- означает операцию свертывания оригиналов.
В раскрытом виде формула свертки (4.34) записывается в виде
 . (4.35)
. (4.35)
Сравнивая первый интеграл в выражении для оптимального закона управления (4.33) с интегралом в выражении (4.35) получим
 и
и  . (4.36)
. (4.36)
Однако, в интеграле свертки и интегралах для функциональных составляющих закона (4.29) не совпадают верхние пределы интегрирования, поэтому прямо воспользоваться формулой свертки нельзя.
Очевидно, что интеграл свертки необходимо привести к виду, обеспечивающему равенство
 . (4.37)
. (4.37)
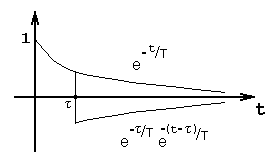 Рис. 4.3.
Рис. 4.3.
|
Это можно достичь, если одну из функций в исходном интеграле искусственно сделать нулевой на интервале времени t > , т.е.
, т.е.  при r >, что иллюстрируется рис.4.3.
при r >, что иллюстрируется рис.4.3.
Функция, существующая на интервале  и равная нулю вне этого интервала в соответствии с рис.4.3, имеет вид:
и равная нулю вне этого интервала в соответствии с рис.4.3, имеет вид: .
.
Тогда L - изображений от первой функциональной составляющей можно записать в виде

 .
.
Учитывая, что  и
и  , получим:
, получим:
 . (4.38)
. (4.38)
Аналогично найдем L -изображение для второй функциональной составляющей в выражении для оптимального закона управления
 . (4.39)
. (4.39)
Исходя из полученных результатов, оптимальный закон управления примет вид(4.40)
Знание операторной формы записи оптимального закона позволяет разработать структурную схему оптимального астатического регулятора для объекта первого порядка с запаздыванием (Рис.4.4).
|
|
|
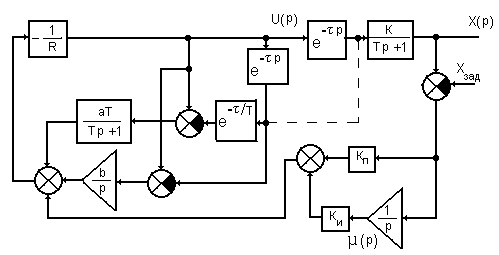
Рис.4.4. Структурная схема оптимальной системы управления
Связь, обозначенная пунктиром, соответствует точному, теоретическому алгоритму управления (4.40). Однако на практике в объекте управления трудно выделить этот сигнал, поэтому его моделируют в регуляторе с помощью звена с чистым запаздыванием.
Как видно из структурной схемы, оптимальный регулятор для объекта первого порядка с запаздыванием состоит из типового ПИ-регулятора и корректирующего устройства, в структуре которого содержится модель объекта управления.
|
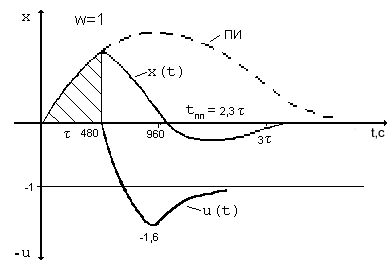
Данный регулятор особенно эффективен для управления объектами, в которых отношение  / Т >0,5. На рис.4.5 приведены графики отработки единичного возмущающего воздействия в оптимальной системе управления объектом первого порядка.
/ Т >0,5. На рис.4.5 приведены графики отработки единичного возмущающего воздействия в оптимальной системе управления объектом первого порядка.
Рис. 4.5. Переходный процесс в системе с оптимальным регулятором
Параметры объекта управления были равны  ; T =612сек; =480 сек. При этом коэффициенты закона (4.40) имели следующие значения
; T =612сек; =480 сек. При этом коэффициенты закона (4.40) имели следующие значения  .
.  ;
;  ;
;  .при R =1,
.при R =1,  .
.
По аналогичной методике может быть получена структура оптимального регулятора для объекта второго порядка с запаздыванием. В этом случае оптимальный регулятор состоит из типового ПИД-регулятора и корректирующего устройства, в структуре которого содержится два инерционных звена и одно интегрирующее.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 332; Нарушение авторских прав?; Мы поможем в написании вашей работы!