КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Последовательные приближения корней
|
|
|
|
| i | x | y | z |
| 0.5 | 0.5 | 0.5 | |
| 0.875 | 0.5 | 0.375 | |
| 0.78981 | 0.49662 | 0.36993 | |
| 0.78521 | 0.49662 | 0.36992 |
Останавливаясь на приближении x (3), будем иметь:
x = 0.7852; y = 0.4966; z =0.3699.
4.3. Решение нелинейных систем методами спуска
Общий недостаток всех рассмотренных выше методов решения систем нелинейных уравнений состоит в локальном характере сходимости, затрудняющем их применение в случаях (достаточно типичных), когда существуют проблемы с выбором начального приближения, обеспечивающего сходимость итерационной вычислительной процедуры. В этих случаях можно использовать численные методы оптимизации - раздела вычислительной математики, выделяемого в самостоятельную дисциплину.
Для использования наглядной геометрической интерпретации приводимых ниже рассуждений и их результатов ограничимся, как и в предыдущем пункте, рассмотрением системы, состоящей из двух уравнений с двумя неизвестными
 (4.16)
(4.16)
Из функций  ,
,  системы (4.16) образуем новую функцию
системы (4.16) образуем новую функцию
 . (4.17)
. (4.17)
Так как эта функция неотрицательная, то найдется точка (вообще говоря,
не единственная)  , такая, что
, такая, что

 .
.
Следовательно, если тем или иным способом удается получить точку , минимизирующую функцию  , и если при этом окажется, что
, и если при этом окажется, что  , то точка - истинное решение системы (4.16), поскольку
, то точка - истинное решение системы (4.16), поскольку
Последовательность точек  - приближений к точке минимума функции - обычно получают по рекуррентной формуле
- приближений к точке минимума функции - обычно получают по рекуррентной формуле
 (4.18)
(4.18)
где 
 - вектор, определяющий направление минимизации, а
- вектор, определяющий направление минимизации, а  - скалярная величина, характеризующая величину шага минимизации (шаговый множитель). Учитывая геометрический смысл задачи минимизации функций двух переменных - «спуск на дно» поверхности
- скалярная величина, характеризующая величину шага минимизации (шаговый множитель). Учитывая геометрический смысл задачи минимизации функций двух переменных - «спуск на дно» поверхности  (рис. 4.1), итерационный метод (4.18) можно назвать методом спуска, если вектор при каждом k является направлением спуска (т.е. существует такое
(рис. 4.1), итерационный метод (4.18) можно назвать методом спуска, если вектор при каждом k является направлением спуска (т.е. существует такое  , что
, что  ) и если множитель подбирается так, чтобы выполнялось условие релаксации
) и если множитель подбирается так, чтобы выполнялось условие релаксации  , означающее переход на каждой итерации в точку с меньшим значением минимизируемой функции.
, означающее переход на каждой итерации в точку с меньшим значением минимизируемой функции.
|
|
|
Таким образом, при построении численного метода вида (4.18) минимизации функции следует ответить на два главных вопроса: как выбирать направление спуска и как регулировать длину шага в выбранном направлении с помощью скалярного параметра - шагового множителя . Приведем простые соображения по этому поводу.
При выборе направления спуска естественным является выбор такого направления, в котором минимизируемая функция убывает наиболее быстро.
| 
|
| Рис. 4.1. Пространственная интерпретация метода наискорейшего спуска для функции (4.17) | Рис. 4.2. Траектория наискорейшего спуска для функции (4.17) |
Как известно из математического анализа функций нескольких переменных, направление наибольшего возрастания функции в данной точке показывает ее градиент в этой точке. Поэтому примем за направление спуска вектор

- антиградиент функции . Таким образом, из семейства методов (4.18) выделяем градиентный метод
 . (4.19)
. (4.19)
Оптимальный шаг в направлении антиградиента - это такой шаг, при котором значение  - наименьшее среди всех других значений Ф(х, у) в этом фиксированном направлении, т.е. когда точка
- наименьшее среди всех других значений Ф(х, у) в этом фиксированном направлении, т.е. когда точка  является точкой условного минимума. Следовательно, можно рассчитывать на наиболее быструю сходимость метода (4.19). если полагать в нем
является точкой условного минимума. Следовательно, можно рассчитывать на наиболее быструю сходимость метода (4.19). если полагать в нем
 . (4.20)
. (4.20)
Такой выбор шагового множителя, называемый исчерпывающим спуском, вместе с формулой (4.19) определяет метод наискорейшего спуска.
Геометрическая интерпретация этого метода хорошо видна из рис. 4.1, 4.2. Характерны девяностоградусные изломы траектории наискорейшего спуска, что объясняется исчерпываемостью спуска и свойством градиента (а значит, и антиградиента) быть перпендикулярным к линии уровня в соответствующей точке.
|
|
|
Наиболее типичной является ситуация, когда найти точно (аналитическими методами) оптимальное значение не удается. Следовательно, приходится делать ставку на применение каких-либо численных методов одномерной минимизации и находить в (4.18) лишь приближенно.
Несмотря на то, что задача нахождения минимума функции одной переменной  намного проще, чем решаемая задача, применение тех или иных численных методов нахождения значений
намного проще, чем решаемая задача, применение тех или иных численных методов нахождения значений  с той или иной точностью требует вычисления нескольких значений минимизируемой функции. Так как это нужно делать на каждом итерационном шаге, то при большом числе шагов реализация метода наискорейшего спуска в чистом виде является достаточно высокозатратной. Существуют эффективные схемы приближенного вычисления квазиоптимальных , в которых учитывается специфика минимизируемых функций (типа сумм квадратов функций) [16].
с той или иной точностью требует вычисления нескольких значений минимизируемой функции. Так как это нужно делать на каждом итерационном шаге, то при большом числе шагов реализация метода наискорейшего спуска в чистом виде является достаточно высокозатратной. Существуют эффективные схемы приближенного вычисления квазиоптимальных , в которых учитывается специфика минимизируемых функций (типа сумм квадратов функций) [16].
Зачастую успешной является такая стратегия градиентного метода, при которой шаговый множитель в (4.18) берется либо сразу достаточно малым постоянным, либо предусматривается его уменьшение, например, делением пополам для удовлетворения условию релаксации на очередном шаге. Хотя каждый отдельный шаг градиентного метода при этом, вообще говоря, далек от оптимального, такой процесс по числу вычислений функции может оказаться более эффективным, чем метод наискорейшего спуска.
Главное достоинство градиентных методов решения нелинейных систем - глобальная сходимость. Нетрудно доказать, что процесс градиентного спуска приведет к какой-либо точке минимума функции из любой начальной точки. При определенных условиях найденная точка минимума будет искомым решением исходной нелинейной системы.
Главный недостаток - медленная сходимость. Доказано, что сходимость этих методов - лишь линейная[1], причем, если для многих методов, таких, как метод Ньютона, характерно ускорение сходимости при приближении к решению, то здесь имеет место скорее обратное. Поэтому есть резон в построении гибридных алгоритмов, которые начинали бы поиск искомой точки - решения данной нелинейной системы - глобально сходящимся градиентным методом, а затем производили уточнение каким-то быстросходящимся методом, например, методом Ньютона (разумеется, если данные функции обладают нужными свойствами).
|
|
|
Разработан ряд методов решения экстремальных задач, которые соединяют в себе низкую требовательность к выбору начальной точки и высокую скорость сходимости. К таким методам, называемым квазиньюто-новскими, можно отнести, например, метод переменной метрики (Дэвидона-Флетчера-Пауэлла), симметричный и положительно определенный методы секущих (на основе формулы пересчета Бройдена).
При наличии негладких функций в решаемой задаче следует отказаться от использования производных или их аппроксимаций и прибегнуть к так называемым методам прямого поиска {циклического покоординатного спуска. Хука и Дживса, Роленброка и т.п.). Описание упомянутых и многих других методов такого типа можно найти в учебной и в специальной литературе, посвященной решению экстремальных задач (см., например. [17-19]).
Замечание 1. Для разных семейств численных методов минимизации могут быть рекомендованы свои критерии останова итерационного процесса. Например, учитывая, что в точке минимума дифференцируемой функции должно выполняться необходимое условие экстремума, на конец счета градиентным методом можно выходить, когда достаточно малой становится норма градиента. Если принять во внимание, что минимизация применяется к решению нелинейной системы, то целесообразнее отслеживать близость к нулю минимизируемой неотрицательной функции, т.е. судить о точности получаемого приближения по квадрату его евклидовой метрике.
Замечание 2. Для решения n -мерной системы (4.1) следует свести задачу к решению экстремальной задачи:
Рассмотрим далее примеры реализации некоторых алгоритмов поиска экстремумов функций, зависящих от нескольких переменных, в пакете MATLAB.
Пример 4.1. Алгоритм поиска экстремума с шагом, не зависящим от свойств минимизируемой функции.
Простейший вариант метода наискорейшего спуска рассмотрим на примере поиска минимума квадратической функции  двух переменных с оврагом, пологость которого определяется параметром m. Решение данной задачи в пакете MATLAB находится выполнением следующей последовательности команд.
двух переменных с оврагом, пологость которого определяется параметром m. Решение данной задачи в пакете MATLAB находится выполнением следующей последовательности команд.
|
|
|
1. Создание файла F_L4.m, с>держащего описание функции, возвращающей значения функции f (x, y) в узлах координатной сетки
% листинг файла F_L4.m
function z=F_L4(x,y,mu)
N=length(x);
z=zeros(N);
for i=1:N
for j=1:N
z(i,j)=x(i).^2+mu*y(j).^2;
end;
end;
2. Построение графиков исследуемой функции при различных значениях параметра m
N=23;
Xmin=-5;Xmax=5;
Ymin=-5;Ymax=5;
i=1:N;j=1:N;
x(i)=Xmin+i*(Xmax-Xmin)/N;
y(j)=Ymin+j*(Ymax-Ymin)/N;
M1=F_L4(x,y,0.5);M2=F_L4(x,y,1);M3=F_L4(x,y,1.5);
[X Y]=meshgrid(x,y);
surfc(X,Y,M1); colormap gray
surfc(X,Y,M2); colorap gray
surfc(X,Y,M3); colormap gray
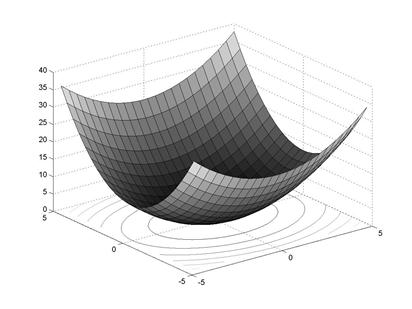
Рис. 4.3. Поверхность и карта линий уровня функции 
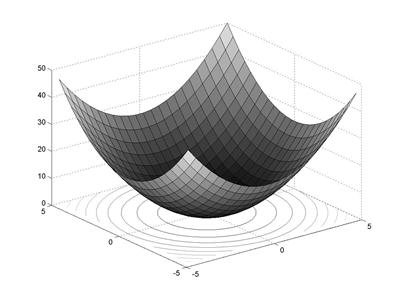
Рис. 4.4. Поверхность и карта линий уровня функции 
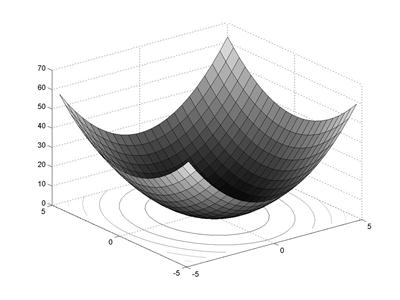
Рис. 4.5. Поверхность и карта линий уровня функции 
Из рис. 4.3-4.5 видно, что при  функция представляет собой параболоид вращения, при
функция представляет собой параболоид вращения, при  параболоид становится эллиптическим, «вытягиваясь» вдоль оси оХ (при
параболоид становится эллиптическим, «вытягиваясь» вдоль оси оХ (при  - вдоль оси оY).
- вдоль оси оY).
3. Создание файла Dx_F_L4.m, содержащего описание функции, возвращающей значения частной производной, по переменной x.
% листинг файла Dx_F_L4.m
function z=Dx_F_L4(x,y,mu)
N=length(x);
z=zeros(N);
i=1:N;
j=1:N;
for i=1:N
for j=1:N
z(i,j)=2*x(i);
end;
end;
4. Создание файла Dy_F_L4.m, содержащего описание функции, возвращающей значения частной производной, по переменной y.
% листинг файла Dy_F_L4.m
function z=Dy_F_L4(x,y,mu)
N=length(x);
z=zeros(N);
i=1:N;
j=1:N;
for i=1:N
for j=1:N
z(i,j)=2*mu*x(i);
end;
end;
5. Создание файла L_Grad.m, содержащего описание функции, возвращающей длину градиента функции f (x, y, m)
% листинг файла L_Grad.m
function z=L_Grad(x,y,mu)
N=length(x);
z=zeros(N);
for i=1:N
for j=1:N
z(i,j)=Dx_F_L4(x(i),y(j),mu).^2+Dy_F_L4(x(i),y(j),mu).^2;
z(i,j)=z(i,j).^0.5;
end;
end;
6. Создание файла S_x.m, содержащего описание функции, возвращающей значение проекции на ось oX нормированного единичного вектора, сонаправленного с вектором, направление которого противоположно направлению вектора градиента
% листинг файла S_x.m
function z=S_x(x,y,mu);
N=length(x);
z=zeros(N);
i=1:N;
j=1:N;
for i=1:N
for j=1:N
z(i,j)=-Dx_F_L4(x(i),y(j),mu)./L_Grad(x(i),y(j),mu);
end;
end;
7. Создание файла S_y.m, содержащего описание функции, возвращающей значение проекции на ось oY нормированного единичного вектора, сонаправленного с вектором, направление которого противоположно направлению вектора градиента
% листинг файла S_y.m
function z=S_y(x,y,mu);
N=length(x);
z=zeros(N);
for i=1:N
for j=1:N
z(i,j)=-Dy_F_L4(x(i),y(j),mu)./L_Grad(x(i),y(j),mu);
end;
end;
8. Создание файла Lambda.m, содержащего описание функции, возвращающей значение шага
% листинг файла Lambda.m
function z=Lambda(x,y,nu,alpha,beta,gamma,lambda0);
z=alpha*lambda0/(beta+gamma*nu);
9. Создание файла MG.m, содержащего описание функции, возвращающей значения переменных x,y и соответствующее значение функции f (x, y, m) на каждом шаге итерационного процесса
% листинг файла MG.m
function [X,Y,ff]=MG(x0,y0,mu,nu,alpha,beta,gamma,lambda0)
X(1)=x0;
Y(1)=y0;
ff(1)=F_L4(x0,y0,mu);
for i=2:nu
X(i)=X(i-1)+Lambda(X(i-1),Y(i-1),nu,alpha,beta,gamma,…
lambda0)*s_x(X(i-1),Y(i-1),mu);
Y(i)=Y(i-1)+Lambda(X(i-1),Y(i-1),nu,alpha,beta,gamma,…
ambda0)*s_y(X(i-1),Y(i-1),mu);
ff(i)=F_L4(X(i),Y(i),mu);
end;
10. Нахождение минимума функции f (x, y, m) и визуализация итерационного процесса
Vmax=20; % максимальное число шагов итерационного процесса
x0=2; y0=-1; % начальное приближение
lambda0=0.3; % начальное значение шага к экстремуму
beta=1; alpha=1; gamma=1; % параметры, используемые для
% определения шага
mu=1;nu=20;
[X,Y,ff]=MG(x0,y0,mu,nu,alpha,beta,gamma,lambda0);
plot(X);
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 256; Нарушение авторских прав?; Мы поможем в написании вашей работы!